-
ros创建工作空间和功能包
1 ros创建工作空间和功能包
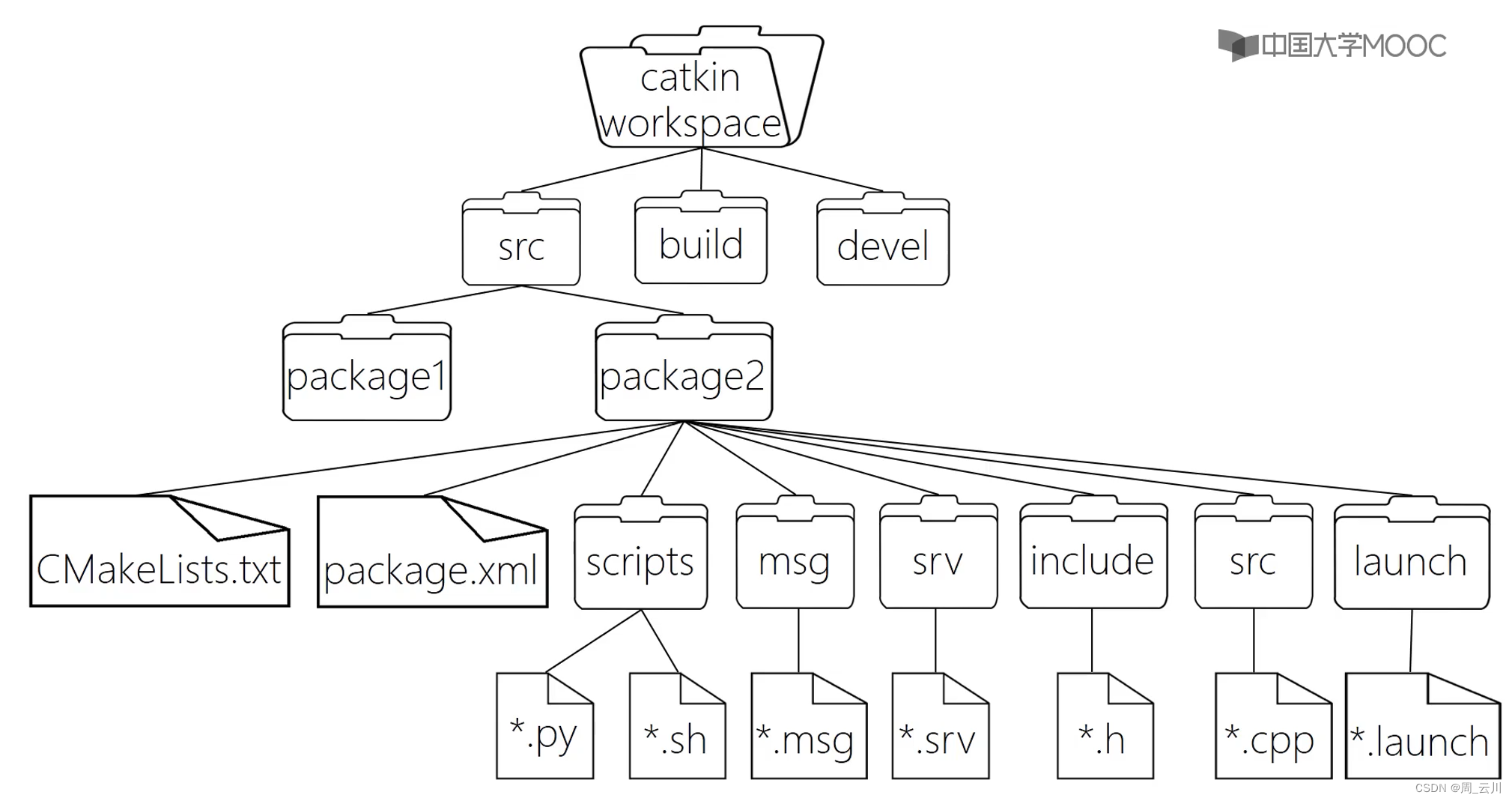
1.1 ros工程结构
1.2 创建工作空间
1.2.1 初始化工作空间
打开终端,快捷键
ctrl+alt+t$ mkdir -p ~/catkin_ws/src # -p代表创建多层目录 $ cd ~/catkin_ws # 进入catkin_ws工作空间 $ catkin_make # 初始化(编译)工作空间- 1
- 2
- 3
1.2.2 设置环境变量
方法1
# 把工作空间添加到bash中,就不用每次启动终端都刷新环境变量 $ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc- 1
- 2
方法2
# 直接打开终端配置文件 $ sudo nano ~/.bashrc # 在文件末尾输入 source ~/catkin_ws/devel/setup.bash- 1
- 2
- 3
- 4
1.3 创建功能包
package是ROS软件的基本组织形式,catkin编译的基本单元
1个package可以包含多个节点(可执行文件)
1个node(节点) = 1个进程(存在main函数) = 1个可执行文件
# 进入src目录 $ cd src # 创建test功能包,依赖为roscpp,rospy,std_msgs $ catkin_create_pkg test roscpp rospy std_msgs- 1
- 2
- 3
- 4
然后进入test功能包src目录,创建hello_ros.cpp文件
$ cd test/src $ touch hello_ros.cpp- 1
- 2
使用编辑器打开源代码文件hello_ros.cpp,输入以下内容
#include "ros/ros.h" int main(int argc, char *argv[]) { ros::init(argc, argv, "hello_ros"); ROS_INFO("hello ros"); return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
修改test功能包下编译相关的CMakeLists.txt,生成可执行文件并将其链接到相关库
# 根据源文件hello_ros.cpp生成可执行文件hello_ros_node add_executable(hello_ros_node src/hello_ros.cpp) # 将可执行文件hello_ros_node链接到库${catkin_LIBRARIES} target_link_libraries(hello_ros_node ${catkin_LIBRARIES} )- 1
- 2
- 3
- 4
- 5
- 6
- 7
除了自己创建功能包,还能从其他地方克隆,根据package下的xml描述文件安装所需的依赖
1.4 编译工作空间
$ cd ~/catkin_ws/ # 进入工作空间目录 $ catkin_make # 编译工作空间- 1
- 2
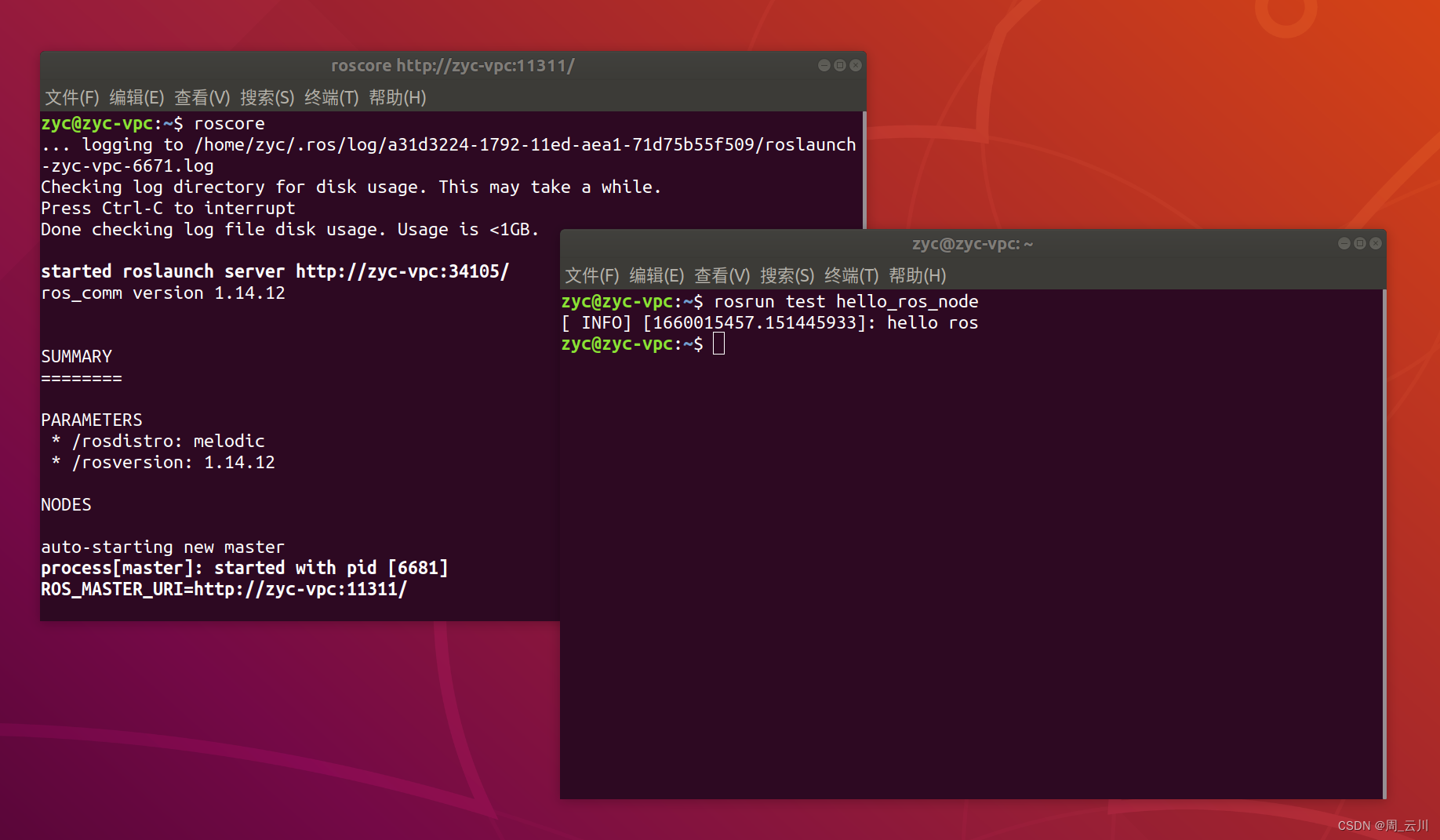
1.5 运行功能包下的可执行文件
$ roscore # 启动ros $ rosrun test hello_ros_node # 运行test功能包下的hello_ros_node可执行文件- 1
- 2
1.6 选择查看当前工作空间下的可用功能包
$ rospack list | grep catkin_ws- 1
-
相关阅读:
韩语图片文字如何转为纯文本?
LeetCode-146. LRU 缓存-Java-medium
AndroidT(13) -- natvie LOG 输出的实现(三)
一文速学 - PHP7特性
3、【第一步】Qlib初始化
【模式识别】计算机科学博士课程作业解析
【Flink】窗口(Window)
.NET 反向代理-YARP 部署Https(SSL)
MySQL索引结构B+树
SQL中使用DATE_FORMATE格式转换需要注意的问题
- 原文地址:https://blog.csdn.net/qq_44743166/article/details/126244125