-
欧拉角、四元数与旋转
欧拉角
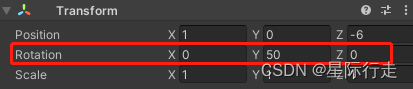
使用三个角度来保存方位,如(0, 50, 0)。
X和Z沿自身坐标系旋转,Y沿世界坐标系旋转。
获取物体欧拉角:Vector3 eulerAngle = transform.eulerAngles;
优点:
1、仅使用三个数字保存方位,占用空间小。
2、沿坐标轴旋转的单位为角度,符合人的思考方式。
3、任意三个数字都是合法的,不存在不合法的欧拉角。
缺点:
一、方位的表达方式不唯一。
1、对于一个方位,存在多个欧拉角描述,因此无法判断多个欧拉角代表的角位移是否相同。
例如:
-- 角度0,5,0与角度0,365,0
-- 角度0,-5,0与角度0,355,0
-- 角度250,0,0与角度290,180,180
前面两种还好,第三种就比较复杂了。
2、为了保证方位表达方式唯一,unity限制了角度范围,即沿X轴旋转限制在-90到90之间,沿Y与Z旋转限制在-180到180之间。(实测,代码中修改欧拉角会受这个限制,之间在场景中修改欧拉角不受该限制)
这里就有个问题,如果修改欧拉角的x值,想让物体一直旋转,但是达到限制角度后,物体就不会继续旋转了。
二、万向节死锁
物体沿X轴旋转±90度,自身坐标系Z轴与世界坐标系Y轴将会重合,此时再沿Y轴或Z轴旋转时,将失去一个自由度。
在万向节死锁情况下,规定沿Z轴完成绕竖直轴的旋转,即此时Y轴旋转为0。
四元数
四元数Quaternion在3D图形学中代表旋转,由一个三维向量(x/y/z)和一个标量(w)组成。
旋转轴为V,旋转弧度为θ,如果使用四元数表示,则四个分量为:
x=sin(θ/2)*V.x
y=sin(θ/2)*V.y
z=sin(θ/2)*V.z
w=cos(θ/2)
x、y、z、w的取值范围是-1到1.
- Quaternion qt = transform.rotation;
- transform.rotation = Quaternion.Euler(0, 50, 0);
优点:避免万向节死锁
缺点:
1、难于使用,不建议单独修改某个数值。
2、存在不合法的四元数。
与向量相乘
四元数左乘向量,表示将该向量按四元数表示的角度旋转。
Vector3 newVec3 = Quaternion.Euler(0, 30, 0) * new Vector3(0, 0, 10);
如计算物体右前方30度,10m远坐标。
- Vector3 vec3 = transform.rotation * new Vector3(0, 0, 10);
- vec3 = Quaternion.Euler(0, 30, 0) * vec3;
- vec3 = transform.position + vec3;
与四元数相乘
两个四元数相乘可以组合旋转效果
- Quaternion q1 = Quaternion.Euler(0, 20, 0) * Quaternion.Euler(0, 30, 0);
- Quaternion q2 = Quaternion.Euler(0, 50, 0);
- // q1和q2相同
- transform.rotation *= Quaternion.Euler(0, 1, 0); // 沿自身y轴旋转
- transform.Rotate(0, 1, 0); // 内部就是使用四元数相乘实现
四元数实战:炸弹-障碍物-玩家范围判定
问题如下图:
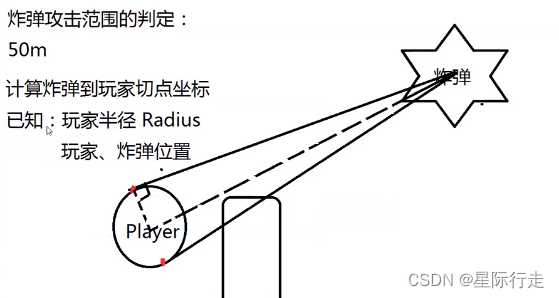
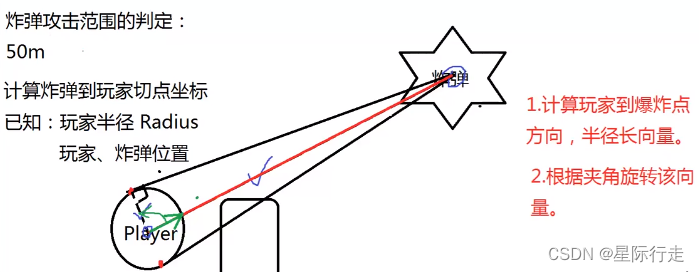
这里只讨论求出两个切点。思路见下图:
计算出两个切点坐标后,计算两切线是否与障碍物相交,即可判定玩家是否被炸伤。
代码如下:
- public Transform tranPlayer;
- private float playRadius = 0.5f;
- public Vector3 leftTangetPoint; // 左切点
- public Vector3 rightTangetPoint; // 右切点
- // 计算切点
- void CalculateTangent()
- {
- Vector3 playerPos = tranPlayer.position;
- Vector3 playerToBomb = transform.position - playerPos;
- Vector3 playerToBombRadius = playerToBomb.normalized * playRadius; // 半径向量
- float angles = Mathf.Acos(playRadius / playerToBomb.magnitude) * Mathf.Rad2Deg;
- leftTangetPoint = playerPos + Quaternion.Euler(0, angles, 0) * playerToBombRadius; // 用四元数旋转半径向量
- rightTangetPoint = playerPos + Quaternion.Euler(0, -angles, 0) * playerToBombRadius;
- }
- void Update()
- {
- CalculateTangent();
- Debug.DrawLine(transform.position, leftTangetPoint);
- Debug.DrawLine(transform.position, rightTangetPoint);
- }
四元数API的应用示例
- public Transform tf;
- //1、欧拉角转四元数
- Quaternion.Euler(0, 50, 0);
- //2、四元数转欧拉角
- Quaternion qt = transform.rotation;
- Vector3 euler = qt.eulerAngles;
- //3、沿任意轴旋转角度,参数2可以传任意向量作为轴
- transform.rotation = Quaternion.AngleAxis(50, Vector3.up);
- //4、z轴指向一个方向, transform的z轴指向tf所在位置
- Vector3 dir = tf.position - transform.position; // 方向向量
- transform.rotation = Quaternion.LookRotation(dir); // 根据方向向量,求出对应的四元数
- // 按给定速度旋转
- Quaternion qTarget = Quaternion.LookRotation(tf.position - transform.position);
- //5、匀速旋转,z轴指向目标
- transform.rotation = Quaternion.RotateTowards(transform.rotation, qTarget, 0.05f);
- //6、插值旋转,z轴指向目标
- transform.rotation = Quaternion.Lerp(transform.rotation, qTarget, 0.01f);
- //7、求两四元数的夹角
- if (Quaternion.Angle(qTarget, transform.rotation) < 1)
- {
- transform.rotation = qTarget;
- }
- //X轴注视旋转
- //8、x轴注视旋转, transform.right可以get和set
- transform.right = tf.position - transform.position;
- //9、x轴注视旋转。创建四元数,从开始方向旋转到目标方向
- transform.rotation = Quaternion.FromToRotation(transform.right, tf.position - transform.position);
-
相关阅读:
动态规划37(Leetcode518零钱兑换2)
Redis的安装以及主从复制&高可用数据库的详解
ModuleNotFoundError: No module named ‘scripts.animatediff_mm‘ 解决方案
混剪功能开发——抖音账号矩阵系统源码解析
Python和SQLite游标处理多行数据
老卫带你学---深入理解Golang之context
新手向:如何考虑将数据库技术和大数据框架结合使用?
【浅学Java】JVM面试必备
【科技与狠货】云盘变硬盘
Java :职责链模式
- 原文地址:https://blog.csdn.net/u012685888/article/details/126230993
