-
目标检测介绍以及自动驾驶场景应用
R-CNN——两阶段,包含Anchor,运行速度较慢
YOLO——单阶段,包含Anchor,运行速度较快
CenterNet——单阶段,关键点表示物体,运行速度较快,超参数较少
Transformer——单阶段,自注意力提取体征,无法达到实时
1.传统物体检测
- 候选窗口
滑动窗口(稠密)
显著性图(稀疏)
- 特征提取
haar特征
HOG特征
- 分类器
AdaBoost
Decision Tree
SVM
问题:针对不同任务,需要手工设计不同的特征,选择不同的分类器
2.自动驾驶感知中应用
场景/光照/天气变化较大
目标种类/形状相对固定,但尺度变化较大
目标在图像中所占比例较小
算法实时性要求较高
1.早期(2013-2014):传统方法+深度学习
- 候选边框:HOG/Haar+AdaBoost
- 边框分类和修正:CNN
- 可以在比较低算力的嵌入式硬件上实现
2.中期(2014-2015):完全深度学习
- 端对端的物体检测:Fast R-CNN
- 速度上进行优化:限制输入图像的大小;限制最大的目标个数;优化金字塔的结构;
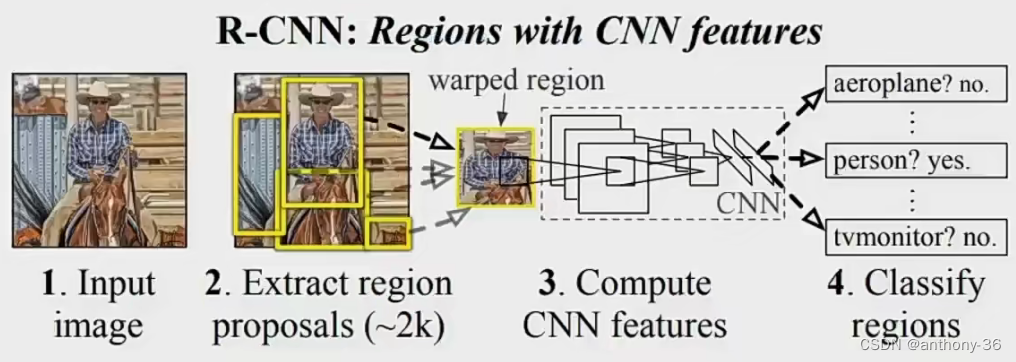
3.R-CNN算法
R-CNN算法(Region-CNN),第一个成功将深度学习应用到目标检测上的算法
1.R-CNN
- 选择性搜索替代滑动窗口
- 卷积神经网络提取图像特征
- 窗口特征采用SVM进行分类
问题:窗口数目重叠太多,导致特征提取的冗余,影响算法的运行效率(20s)
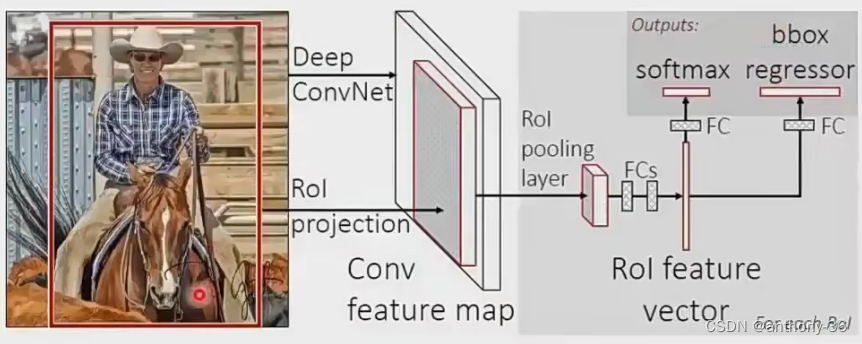
2.Fast R-CNN
- CNN提取全图的特征,避免冗余计算
- 在候选框中进行ROI Pooling
- 全连接网络进行分类和边框回归
问题:通过选择性搜索来得到候选区域,这个过程依然比较慢
3.Faster R-CNN
- 区域候选网络(RPN)在特诊图的基础上生成候选框
- 其余步骤与Fast R-CNN类似
- Anchor概念的引入:回归任务只用处理比较小的变化
- 第一个端到端的物体检测网络,接近实时(17FPS)
问题:ROI Pooling比较耗时,Anchor的设计需要先验知识
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Wo9qQYrl-1659685824474)(C:/Users/13611/AppData/Roaming/Typora/typora-user-images/image-20220805142924819.png)]](https://1000bd.com/contentImg/2022/08/10/175152630.png)
4.Feature Pyramid Network(FPN)
- 特征提取阶段进行优化
- 金字塔结构提取多尺度信息
- 适应不同大小的物体
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-7Yk8kJ0B-1659685824474)(C:/Users/13611/AppData/Roaming/Typora/typora-user-images/image-20220805143602572.png)]](https://1000bd.com/contentImg/2022/08/10/175152864.png)
4.SSD/YOLO(两阶段 - 单阶段)
1.Single Shot MultiBox Detector(SSD)
- 全卷积网络:在所有位置进行分类和回归
- 多分辨率特征图适应不同大小的物体
问题:稠密采样导致正负样本的不平衡,大量负样本会支配损失函数
改进:RetinaNet中的Focal Loss可以更多地关注困难样本
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-mje47Bv9-1659685824475)(C:/Users/13611/AppData/Roaming/Typora/typora-user-images/image-20220805144718877.png)]](https://1000bd.com/contentImg/2022/08/10/175153117.png)
2.You Only Look Once(YOLO)
-
V1:卷积全连接提取特征+全连接层输出物体类别和边框
-
V2-V4:增强特征提取网络,采用多尺度特征图,利用Anchor来辅助边框回归
问题:Anchor需要手工设计,Anchor数目较大影响算法速度
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-4595YFgQ-1659685824475)(C:/Users/13611/AppData/Roaming/Typora/typora-user-images/image-20220805144829523.png)]](https://1000bd.com/contentImg/2022/08/10/175153381.png)
5.Keypoint(Anchor-based 到 Anchor-free)
1.CenterNet
- backbone网络结构与R-CNN/YOLO类似
- 不同之处在于head的设计:物体表示中心点,直接回归边框
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-HSXHAFgM-1659685824476)(C:/Users/13611/AppData/Roaming/Typora/typora-user-images/image-20220805145204491.png)]](https://1000bd.com/contentImg/2022/08/10/175153633.png)
- 中心点分类:正负样本的生成
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-zpZYOTGe-1659685824476)(C:/Users/13611/AppData/Roaming/Typora/typora-user-images/image-20220805150027984.png)]](https://1000bd.com/contentImg/2022/08/10/175154038.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-wVdwYvW1-1659685824476)(C:/Users/13611/AppData/Roaming/Typora/typora-user-images/image-20220805150257278.png)]](https://1000bd.com/contentImg/2022/08/10/175154344.png)
- 与ROI Pooling的区别:只采用中心点处的特征
- 与Anchor的区别:直接估计边框参数
问题:中心点处的特征表示性不够
2.FCOS(Fully Convolutional One-Stage Object Dection)
- 在多分辨率的特征图上进行预测
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-pboBWPGw-1659685824477)(C:/Users/13611/AppData/Roaming/Typora/typora-user-images/image-20220805150718997.png)]](https://1000bd.com/contentImg/2022/08/10/175154674.png)
- 在中心点周边选取多个正样本
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-DgU8f0Gu-1659685824477)(C:/Users/13611/AppData/Roaming/Typora/typora-user-images/image-20220805151335199.png)]](https://1000bd.com/contentImg/2022/08/10/175154949.png)
- 增加了一个Centerness预测分支
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-chNXMLNy-1659685824477)(C:/Users/13611/AppData/Roaming/Typora/typora-user-images/image-20220805151456295.png)]](https://1000bd.com/contentImg/2022/08/10/175155516.png)
2.CornerNet
- Corner Pooling提取特征,预测角点
- 匹配属于同一物体的角点
3.RepPoints
- 物体表示为代表性点集
- 可变性卷积适应物体形状变化
- 点集转换为物体框,计算Loss
6.CenterNet检测结果分析(KITTI数据集)
1.漏检:中心被遮挡
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-eR0cKYzm-1659685824478)(C:/Users/13611/AppData/Roaming/Typora/typora-user-images/image-20220805152828783.png)]](https://1000bd.com/contentImg/2022/08/10/175155967.png)
可能的解决方案:
- 增加角点检测来提高对遮挡物体的鲁棒性,比如CornerNet
- 采用语义分割将其检测为一般性的障碍物
2.误捡:物体处于图像边缘,只有部分可见
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Bw2uoQoI-1659685824478)(C:/Users/13611/AppData/Roaming/Typora/typora-user-images/image-20220805153336892.png)]](https://1000bd.com/contentImg/2022/08/10/175156420.png)
可能的解决方案:
- 根据多帧的结果进行过滤(物体跟踪)
- 采用双目系统,通过增加信息冗余来过滤
3.漏检:物体距离较远,图像上的尺寸较小
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-XrzamLgk-1659685824479)(C:/Users/13611/AppData/Roaming/Typora/typora-user-images/image-20220805153653801.png)]](https://1000bd.com/contentImg/2022/08/10/175156947.png)
可能的解决方案:
- 增加特征图的分辨率,或者多尺度特征图,比如FPN
- 考虑不同大小的检测框可能出现的区域,并相应调整置信度的阈值
4.漏检:多个目标聚集
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ryqRJQqG-1659685824479)(C:/Users/13611/AppData/Roaming/Typora/typora-user-images/image-20220805153900212.png)]](https://1000bd.com/contentImg/2022/08/10/175157300.png)
可能的解决方案:
- 定义新的目标类别,比如"一组行人"
- 采用语义分割而不是物体检测
5.漏检和误检:数据集中比较少见的目标
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-MAC9UhJO-1659685824479)(C:/Users/13611/AppData/Roaming/Typora/typora-user-images/image-20220805154048031.png)]](https://1000bd.com/contentImg/2022/08/10/175157602.png)
可能的解决方案:
- 挖掘“困难数据”,采用类似Boostrap的方式,重新训练模型
- 收集“失败场景”,有针对性的采集类似的数据,迭代模型
7.不同系列物体检测方法对比(KITTI & Waymo)
算法 阶段 Anchor KITTI Car AP Waymo mAP 运行速度fps Faster R-CNN +FPN 两 有 86.1% 62.4% 7 YOLOv4 单 有 90.1% 66.8% 31 CenterNet 单 无 86.7% 64.8% 28 NN +FPN | 两 | 有 | 86.1% | 62.4% | 7 |
| YOLOv4 | 单 | 有 | 90.1% | 66.8% | 31 |
| CenterNet | 单 | 无 | 86.7% | 64.8% | 28 | -
相关阅读:
SaaSBase:Flowportal是什么?
一份笔记让你从 15K 涨薪并跳槽到32K+16
java毕业生设计信管专业毕业生就业管理信息系统计算机源码+系统+mysql+调试部署+lw
第十五章 观察者模式
代码重构常用的技巧
描述符——接口描述符
基于Java+SpringBoot+Vue前后端分离失物招领平台设计和实现
Calculation View里的Keep Flag 和 Transparent Filter
C++ STL进阶与补充(list容器)
吴恩达机器学习课程笔记1-2
- 原文地址:https://blog.csdn.net/qq_46067306/article/details/126179354