-
一体化伺服电机在三轴钻孔机中的应用
1简介
三轴钻孔机可通过点位示教、自动读取当前位置坐标,进行点位设置,实现轨迹自动运行,也可以通过JOG点动实时调试,还可以实时监控电机的运行状态,当设备出现故障时,可以实时显示当前报警,方便使用及后期维护。该套控制系统是在本公司研发的一体化有屏控制器NIM2000上运行,通过可视化界面,方便操作,方便监控。
2系统配置
2.1硬件配置
NIMC2000一体化控制器;
3台PMM6020一体化伺服电机;
开关电源;
电源线及通信电缆若干;
2.2硬件框架

3显示器页面介绍
3.1控制系统运行主页面
设备通电后,一体化控制器自动进入到开机页面并进行通信初始化,页面如下:


点击进入系统,会提示“请输入密码”,正确输入密码后会进入“启动界面”;
3.2启动界面
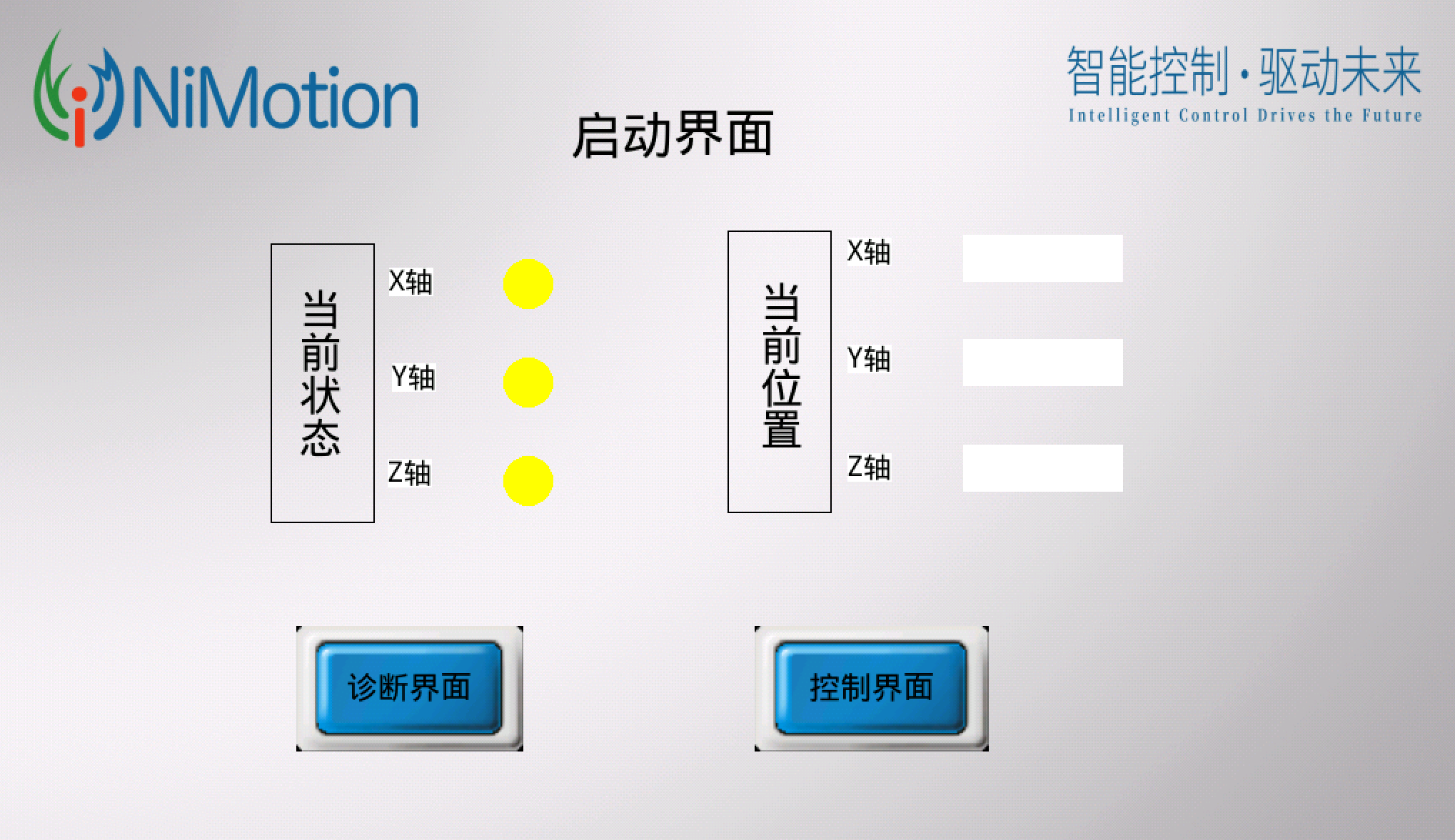
“当前状态”显示X轴、Y轴、Z轴电机的状态,初始状态下指示灯的颜色是黄色,运行过程中的颜色是绿色,故障状态的颜色是红色,从指示灯的颜色即可看出电机实时状态。
“当前位置”显示X轴、Y轴、Z轴电机当前位置。
3.3控制界面

点击控制界面中的“回零启动”,钻孔机的三个轴即可回到设定的零点位置,初始状态指示灯为黄色,运行过程指示灯为绿色,故障状态为红色,零点可在手动界面中设置。
点击“自动启动”,设备即可按照设定的孔位进行自动运行,初始状态为黄色,运行过程指示灯为绿色,故障状态为红色。“当前位置”实时显示X、Y、Z三轴的位置,自动运行的孔位可点击孔位设置界面进行设置。

点击孔位设置、JOG界面、手动界面、诊断界面,即可进入相关界面,回零或自动运行过程中点击“停机”,设备停止运行,点击“暂停”,设备处于暂停状态,点击继续运行设备可继续运行。
3.4孔位设置
在控制界面中点击“孔位设置”,即可进入孔位设置界面,如下图;

孔位设置界面根据设置X、Y、Z轴的位置,点击孔1到孔16后保存参数进行孔位设置,本控制系统最多支持16个孔,点击控制界面即可返回。
3.5JOG界面
在控制界面中点击JOG界面即可点动界面。

该界面可分别控制X、Y、Z轴进行前进、后退、停机。可实时显示设备的位置。点击启动界面即可返回启动界面,点击控制界面即可返回控制界面。
3.6手动控制
在控制界面上点击手动界面即可切换到手动控制界面;

手动控制界面可手动输入X、Y、Z轴的目标位置,电机启动即可运行到目标位置。可实时读取设备的当前位置。点击设置零点即可设定设备的零点坐标,点击控制界面即可返回到控制界面。
3.7诊断界面
在控制界面中点击“诊断界面”会切换到诊断界面。

界面可以实时监控当前报警码,对应故障可手动进行复位,点击报故障说明可查看报警含义,点击启动界面可返回启动界面,点击控制界面可返回控制界面。
3.8故障说明界面
在诊断界面中点击故障说明界面,即可切换到对应界面。

在故障说明界面中可查看对应故障码的含义,可根据报警码查找其报警原因。
4一体化伺服电机参数

-
相关阅读:
SpringBoot Redis使用篇
自定义数据类型
初看python
【Verilog 教程】4.4Verilog 语句块
antd tree 懒加载+局部刷新
ArcGIS笔记12_ArcGIS搜索工具没法用?ArcGIS运行很慢很卡?
04 多表查询
MongoDB基本操作增删改查
多线程的学习01
Spring Boot + Vue的网上商城之客服系统实现
- 原文地址:https://blog.csdn.net/m0_46512607/article/details/126170863