-
STM32输出互补死区刹车PWM
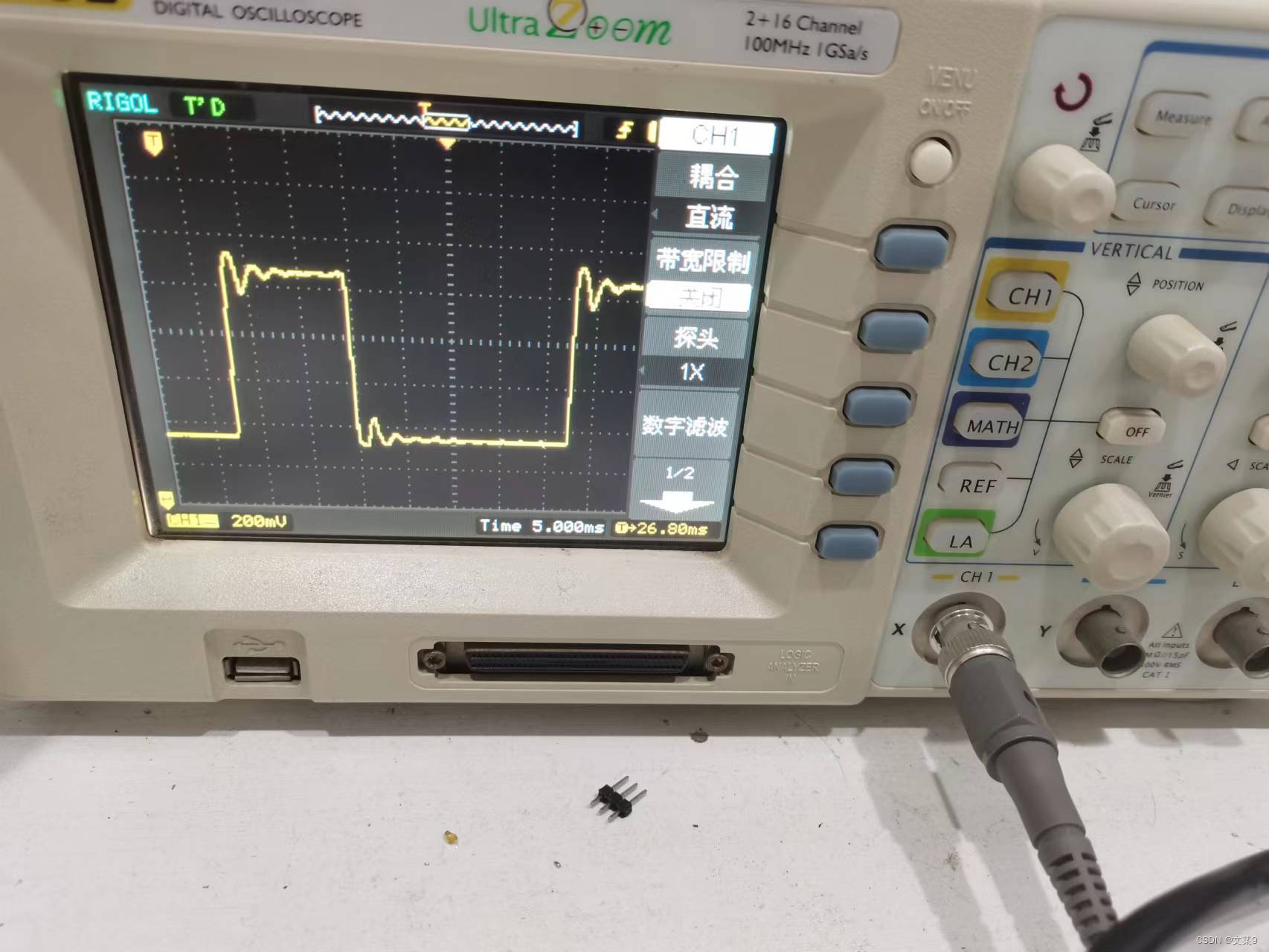
互补死区刹车原理这里不详述互补理解为相反的信号
死区简单理解为信号跳变的缓冲时间
刹车简单理解为暂停信号输出,既然是暂停意味着放开后会再次启动
代码分享
#include "AdvancedTim.h" #include "sys.h" #include "stm32f10x_tim.h" //高级定时器IO口配置 void advancedTim_gpio_init(void) { GPIO_InitTypeDef GPIO_InitStructure; // PIN8配置为PWM输出 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); // PIN13配置为PWM互补输出 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); // 输出比较通道刹车通道 GPIO 初始化 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); // BKIN引脚默认先输出低电平 GPIO_ResetBits(GPIOB,GPIO_Pin_12); } //高级定时器模式配置 void advancedTim_mode_config(void) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE); /*--------------------时基结构体初始化-------------------------*/ TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_TimeBaseStructure.TIM_Period=7; //周期 TIM_TimeBaseStructure.TIM_Prescaler= 8; //预分频 TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;//死区预分频 TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;// 计数器计数模式,设置为向上计数 TIM_TimeBaseStructure.TIM_RepetitionCounter=0;// 重复计数器的值,没用到不用管 // 初始化定时器 TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); /*--------------------输出比较结构体初始化-------------------*/ TIM_OCInitTypeDef TIM_OCInitStructure; TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;// 配置为PWM模式1 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;// 输出使能 TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;// 互补输出使能 TIM_OCInitStructure.TIM_Pulse = 4;// 设置占空比大小 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;// 输出通道电平极性配置 TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;// 互补输出通道电平极性配置 TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;// 死区时电平极性配置 TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset;//互补输出死区电平极性配置 TIM_OC1Init(TIM1, &TIM_OCInitStructure); TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); /*-------------------刹车和死区结构体初始化-------------------*/ // 有关刹车和死区结构体的成员具体可参考BDTR寄存器的描述 TIM_BDTRInitTypeDef TIM_BDTRInitStructure; TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable; TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable; TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_1; // 输出比较信号死区时间配置,具体如何计算可参考 BDTR:UTG[7:0]的描述 // 这里配置的死区时间为152ns TIM_BDTRInitStructure.TIM_DeadTime = 11; TIM_BDTRInitStructure.TIM_Break = TIM_Break_Enable; // 当BKIN引脚检测到高电平的时候,输出比较信号被禁止,就好像是刹车一样 TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High; TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable; TIM_BDTRConfig(TIM1, &TIM_BDTRInitStructure); // 使能计数器 TIM_Cmd(TIM1, ENABLE); // 主输出使能,当使用的是通用定时器时,这句不需要 TIM_CtrlPWMOutputs(TIM1, ENABLE); } //高级定时器初始化配置 void advancedTim_init(void) { advancedTim_mode_config(); advancedTim_gpio_init(); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
这里再分享两个公式
定时器周期=系统时钟/预分频*重装载值
死区时间寄存器设置的值=死区时间/(系统时钟/死区分频)取倒数,这里注意单位转换 1mhz=1us=10*1000ns
工程免费分享评论区获取,如有错误欢迎指正共同进步。
-
相关阅读:
JavaWeb -- MySQL
论文笔记:Auto-Encoding Scene Graphs for Image Captioning
Codeforces Round #800 (Div. 2)
ECC算法,邮件系统安全防护的“得力助手”
【python基础(二)】列表详解
前嗅百科 | 这10个科学常识竟然都不是真的?
L9.linux命令每日一练 -- 第二章 文件和目录操作命令 -- ln和readlink命令
线程池的工作原理
JAVA 判断字符串是否可转化为JSONObject、JSONArray
八、【漏洞复现】jupyter-notebook 命令执行(CVE-2019-9644)
- 原文地址:https://blog.csdn.net/lllmeimei/article/details/126170432