-
spidev的使用(SPI用户态API)
参考资料:
内核驱动:drivers\spi\spidev.c
内核提供的测试程序:tools\spi\spidev_fdx.c
内核文档:Documentation\spi\spidev一、spidev驱动程序分析
内核驱动:drivers\spi\spidev.c
1.1 驱动框架
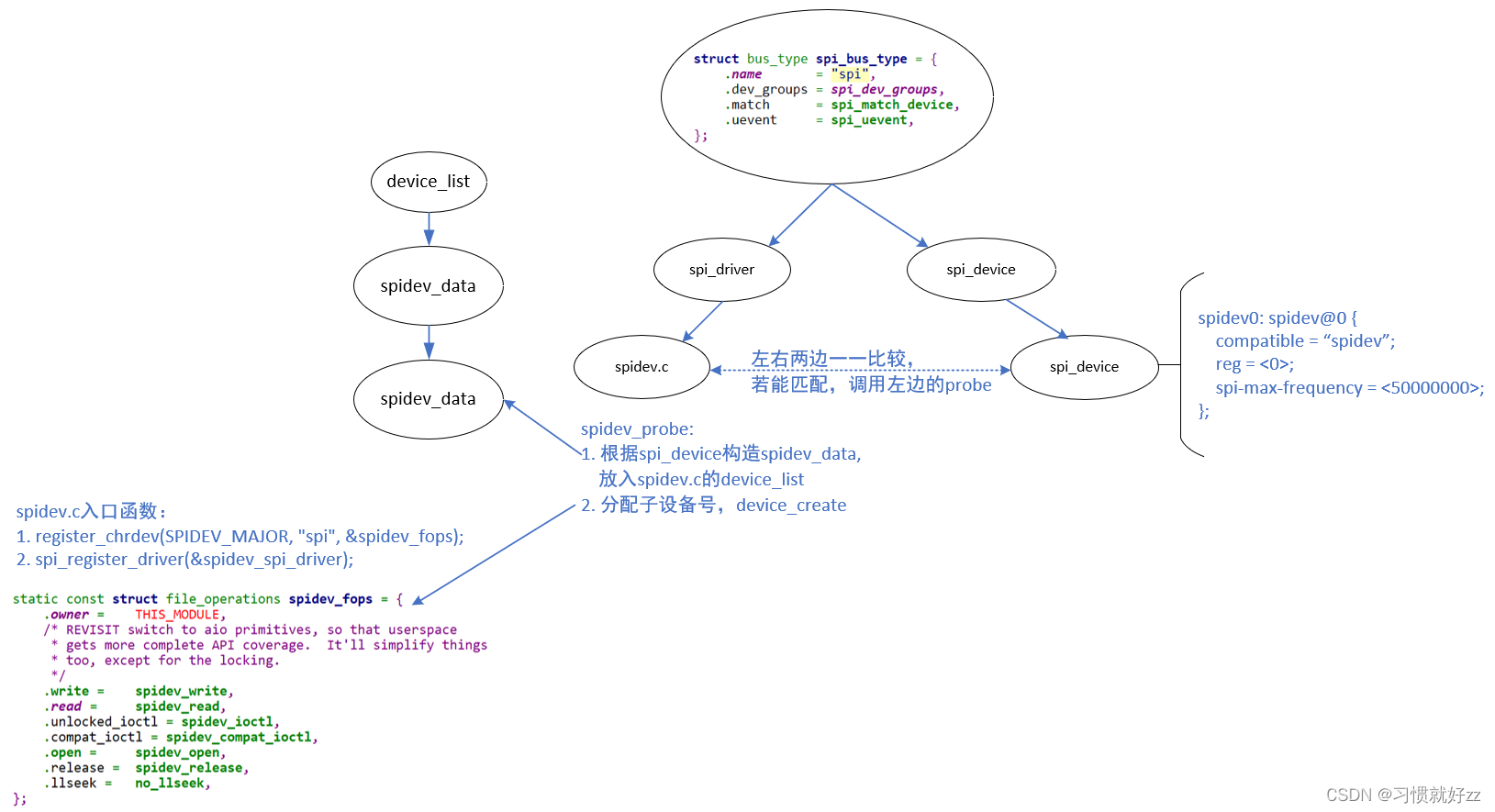
设备树示例:spidev0: spidev@0 { compatible = "spidev"; reg = <0>; spi-max-frequency = <50000000>; };- 1
- 2
- 3
- 4
- 5
设备树里某个spi设备节点的compatible属性等于下列值,就会跟spidev驱动匹配:
- “rohm,dh2228fv”
- “lineartechnology,ltc2488”
- “spidev”
匹配后,spidev.c的spidev_probe会被调用,它会: - 分配一个spidev_data结构体,用来记录对于的spi_device
- spidev_data会被记录在一个链表里
- 分配一个此设备号,以后可以根据这个次设备号在链表里找到spidev_data
- device_create:这会生产一个设备节点/dev/spidevB.D,B表示总线号,D表示它是这个SPI Master下第几个设备
以后,我们就可以通过/dev/spidevB.D来访问spidev驱动程序
1.2 驱动程序分析:
static struct spi_driver spidev_spi_driver = { .driver = { .name = "spidev", .of_match_table = of_match_ptr(spidev_dt_ids), .acpi_match_table = ACPI_PTR(spidev_acpi_ids), }, .probe = spidev_probe, .remove = spidev_remove, }; static int __init spidev_init(void) { int status; BUILD_BUG_ON(N_SPI_MINORS > 256); status = register_chrdev(SPIDEV_MAJOR, "spi", &spidev_fops); //注册spidev_fops //... spidev_class = class_create(THIS_MODULE, "spidev"); //创建spidev类 //... status = spi_register_driver(&spidev_spi_driver); //注册spi_driver //... return status; } module_init(spidev_init); static int spidev_probe(struct spi_device *spi) { struct spidev_data *spidev; int status; unsigned long minor; //.... spidev_probe_acpi(spi); /* Allocate driver data */ spidev = kzalloc(sizeof(*spidev), GFP_KERNEL); //分配结构体 //... /* Initialize the driver data */ spidev->spi = spi; //1. spidev_data里记录spi_device结构体 //... mutex_lock(&device_list_lock); minor = find_first_zero_bit(minors, N_SPI_MINORS); //2. 找到一个空闲的次设备号 if (minor < N_SPI_MINORS) { struct device *dev; spidev->devt = MKDEV(SPIDEV_MAJOR, minor); dev = device_create(spidev_class, &spi->dev, spidev->devt, //3. 创建一个设备,通过/dev/spidevx.x spidev, "spidev%d.%d", spi->master->bus_num, spi->chip_select); //spi的第几个spi_master设备,spi的片选信号信息 status = PTR_ERR_OR_ZERO(dev); } else { //.... } if (status == 0) { set_bit(minor, minors); list_add(&spidev->device_entry, &device_list); //4. 这个spidev_data会放入device_list链表中 //app调用/dev/spidevx.x时,通过次设备号找到spidev_data结构体,从而找到spi_device。 } mutex_unlock(&device_list_lock); spidev->speed_hz = spi->max_speed_hz; //.... return status; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
spidev.c通过file_operation向App提供接口:
static const struct file_operations spidev_fops = { .owner = THIS_MODULE, /* REVISIT switch to aio primitives, so that userspace * gets more complete API coverage. It'll simplify things * too, except for the locking. */ .write = spidev_write, //读写的单工模式 .read = spidev_read, .unlocked_ioctl = spidev_ioctl, //设置频率、模式,进行双工传输(同时读写) .compat_ioctl = spidev_compat_ioctl, .open = spidev_open, .release = spidev_release, .llseek = no_llseek, }; static int spidev_open(struct inode *inode, struct file *filp) { struct spidev_data *spidev; int status = -ENXIO; mutex_lock(&device_list_lock); //1. 在链表中寻找和inode下的注册的次设备号的 list_for_each_entry(spidev, &device_list, device_entry) { if (spidev->devt == inode->i_rdev) { status = 0; break; } } //... spidev->users++; filp->private_data = spidev; //2.把找到的spidev_data保存在私有数据中 nonseekable_open(inode, filp); //.... }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
1.2.1 读函数
static ssize_t spidev_read(struct file *filp, char __user *buf, size_t count, loff_t *f_pos) { struct spidev_data *spidev; ssize_t status = 0; //... spidev = filp->private_data; //从私有数据中获取spidev_data数据 mutex_lock(&spidev->buf_lock); status = spidev_sync_read(spidev, count); //1.读数据 if (status > 0) { unsigned long missing; missing = copy_to_user(buf, spidev->rx_buffer, status); //2.copy_to_user if (missing == status) status = -EFAULT; else status = status - missing; } mutex_unlock(&spidev->buf_lock); return status; } static inline ssize_t spidev_sync_read(struct spidev_data *spidev, size_t len) { struct spi_transfer t = { .rx_buf = spidev->rx_buffer, //2.指定了rx_buffer .len = len, .speed_hz = spidev->speed_hz, }; struct spi_message m; //1.构造一个message //3. 发起传输 spi_message_init(&m); //初始化spi_message spi_message_add_tail(&t, &m); //把transfer放入message中 return spidev_sync(spidev, &m); //发起传输 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
1.2.2 写函数
static ssize_t spidev_write(struct file *filp, const char __user *buf, size_t count, loff_t *f_pos) { struct spidev_data *spidev; ssize_t status = 0; unsigned long missing; /* chipselect only toggles at start or end of operation */ if (count > bufsiz) return -EMSGSIZE; spidev = filp->private_data; mutex_lock(&spidev->buf_lock); missing = copy_from_user(spidev->tx_buffer, buf, count); if (missing == 0) status = spidev_sync_write(spidev, count); //调用函数去写操作 else status = -EFAULT; mutex_unlock(&spidev->buf_lock); return status; } static inline ssize_t spidev_sync_write(struct spidev_data *spidev, size_t len) { struct spi_transfer t = { .tx_buf = spidev->tx_buffer, //2.指定tx_buffer .len = len, //指定长度 .speed_hz = spidev->speed_hz, }; struct spi_message m; //1.构造一个消息 //3.初始化消息,把t放到message的尾部 spi_message_init(&m); spi_message_add_tail(&t, &m); return spidev_sync(spidev, &m); //4.进行SPI的同步操作 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
1.2.3 通过ioctl读写参数
static long spidev_ioctl(struct file *filp, unsigned int cmd, unsigned long arg) { int retval = 0; struct spidev_data *spidev; struct spi_device *spi; u32 tmp; unsigned n_ioc; struct spi_ioc_transfer *ioc; /* Check type and command number */ if (_IOC_TYPE(cmd) != SPI_IOC_MAGIC) return -ENOTTY; /* guard against device removal before, or while, * we issue this ioctl. */ spidev = filp->private_data; spin_lock_irq(&spidev->spi_lock); spi = spi_dev_get(spidev->spi); spin_unlock_irq(&spidev->spi_lock); if (spi == NULL) return -ESHUTDOWN; /* use the buffer lock here for triple duty: * - prevent I/O (from us) so calling spi_setup() is safe; * - prevent concurrent SPI_IOC_WR_* from morphing * data fields while SPI_IOC_RD_* reads them; * - SPI_IOC_MESSAGE needs the buffer locked "normally". */ mutex_lock(&spidev->buf_lock); switch (cmd) { /* read requests */ case SPI_IOC_RD_MODE: retval = put_user(spi->mode & SPI_MODE_MASK, (__u8 __user *)arg); break; case SPI_IOC_RD_MODE32: retval = put_user(spi->mode & SPI_MODE_MASK, (__u32 __user *)arg); break; case SPI_IOC_RD_LSB_FIRST: retval = put_user((spi->mode & SPI_LSB_FIRST) ? 1 : 0, (__u8 __user *)arg); break; case SPI_IOC_RD_BITS_PER_WORD: retval = put_user(spi->bits_per_word, (__u8 __user *)arg); break; case SPI_IOC_RD_MAX_SPEED_HZ: retval = put_user(spidev->speed_hz, (__u32 __user *)arg); break; /* write requests */ case SPI_IOC_WR_MODE: case SPI_IOC_WR_MODE32: if (cmd == SPI_IOC_WR_MODE) retval = get_user(tmp, (u8 __user *)arg); else retval = get_user(tmp, (u32 __user *)arg); if (retval == 0) { u32 save = spi->mode; if (tmp & ~SPI_MODE_MASK) { retval = -EINVAL; break; } tmp |= spi->mode & ~SPI_MODE_MASK; spi->mode = (u16)tmp; retval = spi_setup(spi); if (retval < 0) spi->mode = save; else dev_dbg(&spi->dev, "spi mode %x\n", tmp); } break; case SPI_IOC_WR_LSB_FIRST: retval = get_user(tmp, (__u8 __user *)arg); if (retval == 0) { u32 save = spi->mode; if (tmp) spi->mode |= SPI_LSB_FIRST; else spi->mode &= ~SPI_LSB_FIRST; retval = spi_setup(spi); if (retval < 0) spi->mode = save; else dev_dbg(&spi->dev, "%csb first\n", tmp ? 'l' : 'm'); } break; case SPI_IOC_WR_BITS_PER_WORD: retval = get_user(tmp, (__u8 __user *)arg); if (retval == 0) { u8 save = spi->bits_per_word; spi->bits_per_word = tmp; retval = spi_setup(spi); if (retval < 0) spi->bits_per_word = save; else dev_dbg(&spi->dev, "%d bits per word\n", tmp); } break; case SPI_IOC_WR_MAX_SPEED_HZ: retval = get_user(tmp, (__u32 __user *)arg); if (retval == 0) { u32 save = spi->max_speed_hz; spi->max_speed_hz = tmp; retval = spi_setup(spi); if (retval >= 0) spidev->speed_hz = tmp; else dev_dbg(&spi->dev, "%d Hz (max)\n", tmp); spi->max_speed_hz = save; } break; default: /* segmented and/or full-duplex I/O request */ /* Check message and copy into scratch area */ ioc = spidev_get_ioc_message(cmd, (struct spi_ioc_transfer __user *)arg, &n_ioc); if (IS_ERR(ioc)) { retval = PTR_ERR(ioc); break; } if (!ioc) break; /* n_ioc is also 0 */ /* translate to spi_message, execute */ retval = spidev_message(spidev, ioc, n_ioc); kfree(ioc); break; } mutex_unlock(&spidev->buf_lock); spi_dev_put(spi); return retval; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
二、spidev应用程序分析
内核提供的测试程序:tools\spi\spidev_fdx.c
2.1 使用方法
spidev_fdx [-h] [-m N] [ -r N] /dev/spidevB.D- -h:打印用法
- -m N:先写1个字节0xaa,再读N个字节,注意:不是同时写同时读
- -r N:读N个字节
2.2 代码分析
2.2.1 显示设备属性:
static void dumpstat(const char *name, int fd) { __u8 lsb, bits; __u32 mode, speed; if (ioctl(fd, SPI_IOC_RD_MODE32, &mode) < 0) { perror("SPI rd_mode"); return; } if (ioctl(fd, SPI_IOC_RD_LSB_FIRST, &lsb) < 0) { perror("SPI rd_lsb_fist"); return; } if (ioctl(fd, SPI_IOC_RD_BITS_PER_WORD, &bits) < 0) { perror("SPI bits_per_word"); return; } if (ioctl(fd, SPI_IOC_RD_MAX_SPEED_HZ, &speed) < 0) { perror("SPI max_speed_hz"); return; } printf("%s: spi mode 0x%x, %d bits %sper word, %d Hz max\n", name, mode, bits, lsb ? "(lsb first) " : "", speed); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
2.2.2 读数据
static void do_read(int fd, int len) { unsigned char buf[32], *bp; int status; /* read at least 2 bytes, no more than 32 */ if (len < 2) len = 2; else if (len > sizeof(buf)) len = sizeof(buf); memset(buf, 0, sizeof buf); status = read(fd, buf, len); //读取数据 if (status < 0) { perror("read"); return; } if (status != len) { fprintf(stderr, "short read\n"); return; } printf("read(%2d, %2d): %02x %02x,", len, status, buf[0], buf[1]); status -= 2; bp = buf + 2; while (status-- > 0) printf(" %02x", *bp++); printf("\n"); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
2.2.3 先读再写
static void do_msg(int fd, int len) { struct spi_ioc_transfer xfer[2]; unsigned char buf[32], *bp; int status; memset(xfer, 0, sizeof xfer); memset(buf, 0, sizeof buf); if (len > sizeof buf) len = sizeof buf; //1.先写 buf[0] = 0xaa; xfer[0].tx_buf = (unsigned long)buf; xfer[0].len = 1; //2.后读 xfer[1].rx_buf = (unsigned long) buf; xfer[1].len = len; status = ioctl(fd, SPI_IOC_MESSAGE(2), xfer); if (status < 0) { perror("SPI_IOC_MESSAGE"); return; } printf("response(%2d, %2d): ", len, status); for (bp = buf; len; len--) printf(" %02x", *bp++); printf("\n"); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
2.2.4 同时读写
static void do_msg(int fd, int len) { struct spi_ioc_transfer xfer[2]; unsigned char buf[32], *bp; unsigned char buf_rx[32], *bp; int status; memset(xfer, 0, sizeof xfer); memset(buf, 0, sizeof buf); if (len > sizeof buf) len = sizeof buf; //设置同一个xfer的tx_buf,rx_buf即可同时读写 buf[0] = 0xaa; xfer[0].tx_buf = (unsigned long)buf; xfer[0].rx_buf = (unsigned long)buf_rx; xfer[0].len = 1en; status = ioctl(fd, SPI_IOC_MESSAGE(1), xfer); if (status < 0) { perror("SPI_IOC_MESSAGE"); return; } printf("response(%2d, %2d): ", len, status); for (bp = buf; len; len--) printf(" %02x", *bp++); printf("\n"); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
三、spidev的缺点
使用read、write函数时,只能读、写,之二十半双工方式
使用ioctl可以达到全双工的读写
但是spidev有2个缺点:- 不支持中断
- 只支持同步操作,不支持异步操作:就是read/write/ioctl这些函数只能执行完毕才可返回
-
相关阅读:
Debezium系列之:debezium把sqlserver数据库多张表的数据发送到一个kafka topic
Unity关于GL绘制和Gizmos绘制的Matrix问题。
让测试人头疼的这几件“小事”
Nginx配置微服务避免actuator暴露
GIT使用踩坑!!!我的妈妈呀,烦死了烦死了烦死了!!!
ST表(RMQ问题)
骑士CMS01 74cms v4.2.111 后台getshell漏洞复现
C 语言宏 + 内联汇编实现 MIPS 系统调用
数据标准的制定落地
设计模式之代理模式
- 原文地址:https://blog.csdn.net/ch122633/article/details/125946596