-
【3D视觉】深度摄像头与3D重建
1,Kinect
是微软在2010年6月14日对XBOX360体感周边外设正式发布的名字。大家在上图可以看到,Kinect两端有两个3D深度摄像头,左边那个发射红外线,右边那个是一个红外线感应器,它负责感应发射出来的红外线的方位和强度,由此来获取物体与Kinect之间的深度信息(个人感觉类似声纳和蝙蝠的识别系统),然后再根据中间的一个RGB摄像头,三个摄像头配合构建出了Kinect的图像识别的检测。Kinect V2的Depth传感器,采用的是「Time of Flight(TOF)」的方式,通过从投射的红外线反射后返回的时间来取得Depth信息。


开源三维重建 3D reconstruction
(1)官网:DynamicFusion Project Page
代码:https://github.com/mihaibujanca/dynamicfusion
重建效果:

(2)官网:BundleFusion
论文:https://arxiv.org/pdf/1604.01093.pdf
2.英特尔® 实感™ D435
具有非常适合 3D 扫描等高精度应用的标准视场角。D435 在深度传感器上采用卷帘快门,可提供最高的每度深度质量。
https://www.intelrealsense.com/zh-hans/depth-camera-d435/


开源三维重建 3D reconstruction
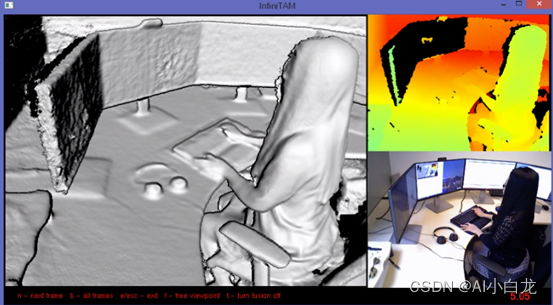
InfiniTAM提供Linux,iOS,Android平台版本,CPU可以实时重建。
官网:InfiniTAM v3
GitHub代码:victorprad/InfiniTAM
效果:
3,PrimeSense
以色列3d传感器公司,成立于2005年,2006年成功研制出基于结构光原理的3维传感器(这款芯片运用了“光编码”技术去制造场景,并且使用近IR(红外辐射)光线和CMOS(互补金属半导体)传感器去解读场景背后的光代码,最后使用复杂的算法去分析3D数据。),2009年微软发布的体感游戏产品-kinect便是采用该公司提供的3D传感器。2010 年年底,PrimeSense 与华硕合作开发了 Xtion Pro——和 Kinect 采用了同样的 3D 传感器,不过只能在 PC 上使用。2011 年,PrimeSense 与 Willow Garage 合作,创立了旨在“推动 3D 应用开源软件社区发展”的非营利性机构OpenNI。2012 年(也有说2013年的),PrimeSense 推出了世界上体积最小的 3D 传感器 Capri,它的分辨率是前代产品的 3 倍,而体型是前代的十分之一,环境光的检测性能是前代的 50 倍,可以在日光下工作。Capri 可以嵌入到平板电脑、笔记本电脑、智能手机以及显示器中。最后以34亿美元被苹果收购。
开源三维重建 3D reconstruction
项目官网:http://qianyi.info/scene.html
GitHub代码:qianyizh/ElasticReconstruction
-
相关阅读:
vue+springboot,easyexcel的excel文件下载
深入理解Java线程间通信
29、Elasticsearch进阶查询
PC端实现列表懒加载
竞赛题-6233. 温度转换
图扑软件数字孪生民航飞联网,构建智慧民航新业态
【调试工具|mqtt-spy】mqtt客户端调试工具 mqtt-spy 详细使用教程
MindSpore社区群组介绍系列之三——WG- Molecular Modeling
基于ADuCM4050的SPI初始化及读取
软件设计不是CRUD(15):低耦合模块设计理论——行为抽象与设计模式(中)
- 原文地址:https://blog.csdn.net/qq_34106574/article/details/126090591