-
3D激光SLAM:ALOAM---后端lasermapping 里程计到地图位姿更新维护
前言
在上一篇博客(ALOAM:后端lasermapping通过Ceres进行帧到地图的位姿优化)中,通过Ceres优化得到了 当前帧到地图的最优位姿
下面要做的是更新地图模块中维护的一个位姿,这个位姿就是odom到map之间的位姿变换。
为什么要更新这个位姿呢?
因为在前面这篇博客中(ALOAM:后端laserMapping代码结构与数据处理分析),在收到前端里程计数据后,会以前端里程计的频率,向外发布一个高频率当前帧到地图坐标系下的位姿。
这这里用到了T_map_odom,就是在后端通过Ceres得到当前帧到map的位姿后,再计算odom到map的位姿,所以要更新这个位姿,为下一帧做准备。并且在进行栅格地图位置更新处理的时候,也通过上一帧维护的T_map_odom,得到当前帧的一个初值估计。所以得到当前帧到map的位姿后,需要更新odom到map的位姿,为下一帧的处理做准备。相关内容在这篇博客(ALOAM:后端lasermapping地图栅格化处理与提取)的这个地方:

odom到map之间的位姿更新原理
通过Ceres的优化 得到了,当前帧到map的位姿变换

前端里程计向后端发布的是,当前帧到odom的位姿变换

那么计算odom到map的位姿变换的公式为:

写成旋转+平移的齐次矩阵的形式,上面的公式则变为:

那么 odom到map之间旋转和平移则为

下面来看ALOAM中代码是如何实现的
代码解析
在前面通过ceres的优化得到了 当前帧到地图的位姿变换。该位姿变换存在 parameters 变量中。
这个parameters是一个double 的7维数组

前4位是旋转四元数,后三位是平移向量然后程序则调用了
//更新odom到map之间的位姿变换 transformUpdate();- 1
- 2
这个就是更新odom到map之间的位姿变换的函数。
里面的内容是:
//更新odom到map之间的位姿变换 void transformUpdate() { q_wmap_wodom = q_w_curr * q_wodom_curr.inverse(); t_wmap_wodom = t_w_curr - q_wmap_wodom * t_wodom_curr; }- 1
- 2
- 3
- 4
- 5
- 6
其中
- q_wmap_wodom 就是 odom到map 的旋转 四元数
- t_wmap_wodom 就是 odom到map 的平移
q_wodom_curr 是前端里程计发来的 curr到odom的 旋转四元数
t_wodom_curr 是前端里程计发来的 curr到odom的 平移- q_w_curr 是Ceres优化的 curr到map的旋转四元数
- t_w_curr 是Ceres优化的 curr到map的平移
在整个程序中并没有发现q_w_curr 和 t_w_curr 被赋值的地方,尤其是ceres计算完后并没给这两个变量赋值。
那么这两个变量是如何被赋值的呢?
在它俩声明的地方:

是通过eigen的map声明的
当ceres 更新 parameters之后 会通过 eigen的map 实时更新q_w_curr和t_w_curr 不需要自己再去转换这里简单介绍下 Eigen 的Map 类:
Eigen中定义了一系列的vector和matrix,相比copy数据,更一般的方式是复用数据的内存,将它们转变为Eigen类型。Map类很好地实现了这个功能。简单理解Map就是将原始“连续内存存储”的数据,以矩阵形式重新组织。在使用Map时就需要原始数据,Map后的数据的维度形式,Map时使用的Stride设定。所谓Stride,既指矩阵中沿着矩阵列或行方向移动一个位置,内存中需要移动的位置数。这个需要移动的内存位置数与矩阵采用的存储方式有关(列或行主导)。
Eigen::Map原型
template<typename PlainObjectType, int MapOptions, typename StrideType> class Map: public MapBase<Map<PlainObjectType, MapOptions, StrideType> >- 1
- 2
- **PlainObjectType :**映射数据的等价矩阵类型
- **MapOptions:**指定指针对齐方式,默认是未对齐的
- **StrideType:**指定步长
这个类的作用就是让非Eigen数据结构变成Eigenj矩阵或者向量时,减少在复制过程中的开销,Eigen官网描述这样使用没有开销。
构造函数有以下
Map (PointerArgType dataPtr, const StrideType &stride=StrideType()) Map (PointerArgType dataPtr, Index size, const StrideType &stride=StrideType()) Map (PointerArgType dataPtr, Index rows, Index cols, const StrideType &stride=StrideType())- 1
- 2
- 3
举个最简单的例子
int array[9]; for (int i = 0; i < 9; ++i) array[i] = i; std::cout << Eigen::Map<Eigen::Matrix3i>(array) << std::endl;- 1
- 2
- 3
- 4
输出为:
0 3 6
1 4 7
2 5 8
再举一个和ALOAM使用情况一样的例子,将一个数组元素转换成Eigen数据结构int data[] = {1,2,3,4,5,6,7,8,9}; Map<RowVectorXi> v(data,4); cout << "The mapped vector v is: " << v << "\n"; new (&v) Map<RowVectorXi>(data+4,5); cout << "Now v is: " << v << "\n- 1
- 2
- 3
- 4
- 5
输出为:
The mapped vector v is: 1 2 3 4
Now v is: 5 6 7 8 9看了这几个例子,就明白,在Ceres优化完成后,这两个变量(q_w_curr ,t_w_curr )就被更新值了。
- q_w_curr 是Ceres优化的 curr到map的旋转四元数
- t_w_curr 是Ceres优化的 curr到map的平移
在transformUpdate() 函数中计算的公式就是上面推导的:
q_wmap_wodom = q_w_curr * q_wodom_curr.inverse(); t_wmap_wodom = t_w_curr - q_wmap_wodom * t_wodom_curr;- 1
- 2
在后面后端会把 q_w_curr,t_w_curr做为里程计更新发布出来
nav_msgs::Odometry odomAftMapped; odomAftMapped.header.frame_id = "/camera_init"; odomAftMapped.child_frame_id = "/aft_mapped"; odomAftMapped.header.stamp = ros::Time().fromSec(timeLaserOdometry); odomAftMapped.pose.pose.orientation.x = q_w_curr.x(); odomAftMapped.pose.pose.orientation.y = q_w_curr.y(); odomAftMapped.pose.pose.orientation.z = q_w_curr.z(); odomAftMapped.pose.pose.orientation.w = q_w_curr.w(); odomAftMapped.pose.pose.position.x = t_w_curr.x(); odomAftMapped.pose.pose.position.y = t_w_curr.y(); odomAftMapped.pose.pose.position.z = t_w_curr.z(); pubOdomAftMapped.publish(odomAftMapped);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
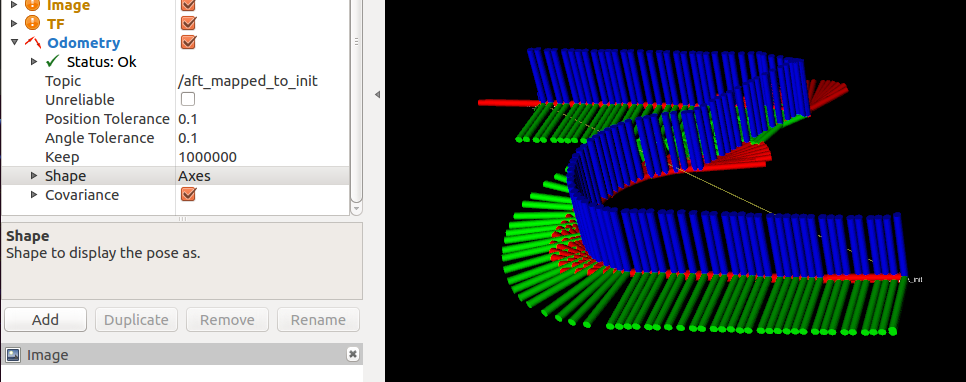
可以在rviz中添加一个odometry的选项,选择topic为/aft_mapped_to_init来显示。 -
相关阅读:
记一次 .NET 某游戏网站 CPU爆高分析
docker build xxx --build-arg设置http_proxy环境变量
如何在SOLIDWORKS PDM中快速导出BOM表
如何从零开始参与 Apache 顶级开源项目?
STM32 CAN使用
汇编语言中断及外部设备操作篇--06
shiro认证绕过:CVE-2020-(1957,17523)
REVIT中一次性导出项目里的族及“项目族管理”操作
LINK : fatal error LNK1104: 无法打开文件“python310.lib”解决方案
【Endnote】插入文献时,自动弹出select matching reference
- 原文地址:https://blog.csdn.net/qq_32761549/article/details/125926293