-
ROS安装过程中的问题汇总
ROS安装过程中的问题汇总
#1 安装ROS卡在 sudo rosdep init和rosdep update上解决办法
成功解决的办法:
添加代理
1.打开包含资源下载函数的文件:$ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py- 1
2.添加代理:
url=“https://ghproxy.com/”+url
添加的位置如图:

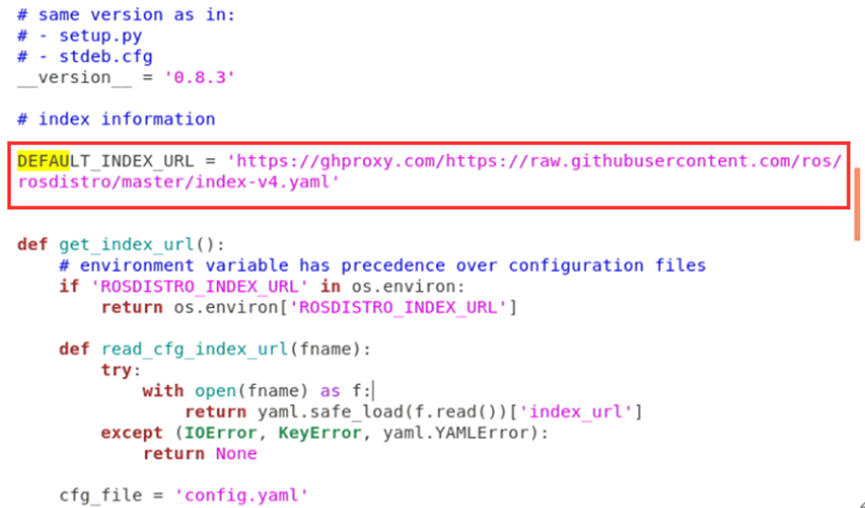
3. 修改/usr/lib/python2.7/dist-packages/rosdistro/_init_.py文件中的DEFAULT_INDEX_URL$ sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/__init__.py DEFAULT_INDEX_URL = 'https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'- 1
- 2
4. 修改其余(4个)文件中的地址,在地址 https://raw.githubusercontent.com/… 前添加https://ghproxy.com/$ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py //修改第36行的地址 $ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py 72行 //修改第72行 $ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/rep3.py //修改第39行 $ sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py //修改第68行、119行- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
5.解决 Hit 第五个地址的报错
$ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py //在第204行添加如下代码(即在该函数块下的第一行处) gbpdistro_url = "https://ghproxy.com/" + gbpdistro_url //注意,原网址中代理地址的双引号是中文,直接粘贴复制会报字符识别错误- 1
- 2
- 3
- 4
6.多次运行 rosdep update ,发现问题完美解决。
#2 rosdep update 出现time out 解决办法
执行rosdep update的时候,报错就是显示超时。
解决办法
更改 /usr/lib/python2.7/dist-packages/rosdep2/下的三个文件sources_list.py、gbpdistro_support.py、rep3.py
中的DOWNLOAD_TIMEOUT = 15.0值,改大一点就可以了。
操作如下sudo vim /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py- 1
然后利用vim的搜索功能输入:/DOWNLOAD_TIMEOUT搜索到这一行,修改过后输入:wq保存退出就行了。
这个修改过后只是成功的几率会高很多,后面执行命令的时候发现卡住了就Ctrl + C重来多执行几次就过了。#3 ROS安装问题: “Command ‘roscore‘ not found, but can be installed with: sudo apt install python-roslaunch”
报错:
Command ‘roscore’ not found, but can be installed with:
sudo apt install python-roslaunch根据提示输入:
sudo apt install python-roslaunch- 1
报错:
E: Unable to correct problems, you have held broken packages.解决方案
指令 “roscore” 之所以能够被执行,首先需要在文件夹 “/opt/ros/indigo/bin/” 里面存在名为 “roscore” 的二进制可执行文件,打开文件夹,检查文件是否存在:cd /opt/ros/melodic/bin ls -l- 1
- 2
果然没有。
sudo apt-get install ros-melodic-desktop- 1
cd 进去再看,有了!
执行source ~/.bashrc roscore- 1
- 2
-
相关阅读:
HR应用在线人才测评,给企业招聘带来的好处
《THE ENERGY MACHINE OF JOSEPH NEWMAN》翻译
数据结构-leetcode-环形链表
ubuntu22.04使用共享文件设置
MySQL数据库基本操作1
Biome-BGC生态系统模型教程
SpringBoot 静态资源规则
java+python离退休人员工资管理系统
预约到家按摩小程序开发定制同城服务
ReactNative 网络库
- 原文地址:https://blog.csdn.net/weixin_45532870/article/details/125622550