-
【目标跟踪】|模板更新 时间上下文信息(UpdateNet)《Learning the Model Update for Siamese Trackers》
文章标题:《Learning the Model Update for Siamese Trackers》
文章地址:[1] arXiv,[2] ICCV2019 openaccess
github地址:https://github.com/zhanglichao/updatenet更新策略
仅使用第一帧初始模板
在早期的 Siamese 跟踪器里,第一帧就对目标模板进行初始化,后面都固定使用这个模板进行跟踪。然而实际任务中目标外观变化通常很明显,如果不能有效地更新目标模板,很快就会跟踪失败。
线性更新
为了解决这个问题,目前已经有人做了一些简单的更新策略,通过固定学习率的移动平均方法,对目标模板进行线性更新:

我们认为这种方法有一些缺点:- 对于所有视频,它都用一个固定的更新率。但是不同情况下,对于更新的需求是不一样的,要考虑的因素很复杂。例如相机运动模糊,不同时刻的动态变化等。
- 这个更新率对于模板的所有空间维度(包括通道维度)上也是固定的。但有时候我们只需要更新模板的一部分,例如发生遮挡时。
- 跟踪器不能从累计漂移中恢复过来。随着模板的更新,我们失去了 T 0 的原始信息,而第一帧的模板 T0才是我们最开始想要跟踪的目标。
- 公式(1)只是一个非常简单的线性组合,但是我们需要灵活的更新机制,这在目标外观变化复杂时非常有必要。用更复杂的组合函数也许会好点。
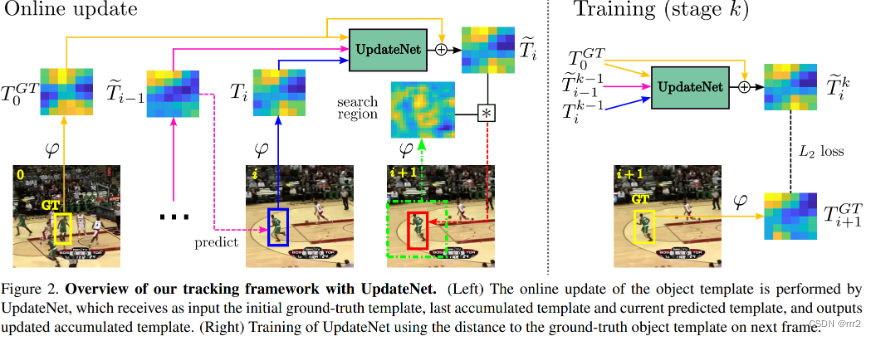
自适应更新

更新算法永远都会考虑第一帧的模板 提供了高度可靠的信息,增强了对于后期跟踪漂移的鲁棒性。

ref
翻译
https://blog.csdn.net/PAN_Andy/article/details/103008079
https://blog.csdn.net/Yemiekai/article/details/123014839、 -
相关阅读:
C Primer Plus(6) 中文版 第3章 数据和C 3.5 使用数据类型
100个特别的遥感应用和用途
MySQL-索引优化/查询优化
593. 有效的正方形 : 简单几何运用题
贴片天线的特征模分析及其应用
计算机毕业设计微信小程序开发项目源代码ssm超市购物系统小程序+后台管理系统|前后分离VUE[包运行成功]
会声会影色彩校正在哪里 会声会影色彩素材栏在哪 会声会影中文免费版下载
柯桥生活口语学习,英语中初次见面,除了Nice to meet you,还能说什么?
Vue Hooks 让Vue开发更简单与高效
07-JS事件:事件类型、事件对象、事件传播、事件委托
- 原文地址:https://blog.csdn.net/qq_35608277/article/details/125553825