-
现代控制理论入门+理解
我认为你已经学了自动控制理论了(这篇文章后面写的很随便)
状态空间
我们可考虑控制车辆(我们假设都是线性系统),我们的输入有方向盘,油门,刹车等。我们输出有速度、加速度、角度、角速度等信息。如果是自动控制理论,我们对每个输入和输出都建立传递函数,然后分析。这很麻烦,并且不够系统。
在进入现代控制理论前,非常重要一点是,我们需要把输出和状态的关系搞清楚。我们前面说的速度、加速度、角度、角速度其实都是系统的状态,我们想要控制的其实是状态。输出只是表象。 就像你把加速度和速度加起来输出,再把速度和速度减起来输出,虽然没有任何意义。但是其实也可以还原出系统的状态。输出只是使用传感器将状态表现出来。状态是比输出更本质的东西。
因此,我么需要更系统、更本质的来体现出系统的全貌,现代控制理论就来了。
什么是状态空间:
一辆直线运动的车, x = [ r , r ˙ , r ¨ ] T x=[r,\dot r,\ddot r]^T x=[r,r˙,r¨]T三个状态分别为位置,速度,加速度。这三个量就足以表示这辆车的完全状态了。而所有状态可能的赋值,组成的空间就是状态空间,如果加上状态变化的方向就会形成场,这个另说了。
下面这个就是你最开始学习现控会看到的东西,我来帮助你理解一下:
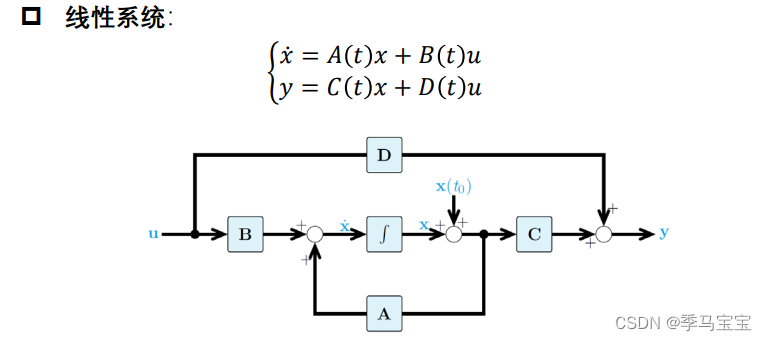
x x x就是目前的状态, u u u是输入, x ˙ \dot x x˙是状态的变化率,三者构成了一个微分方程。在离散形式下会变成 x ( n ) = A x ( n − 1 ) + B x ( n − 1 ) x(n)=Ax(n-1)+Bx(n-1) x(n)=Ax(n−1)+Bx(n−1),是不是好理解多了,就是在目前状态加入输入会使下一个状态变成什么样。
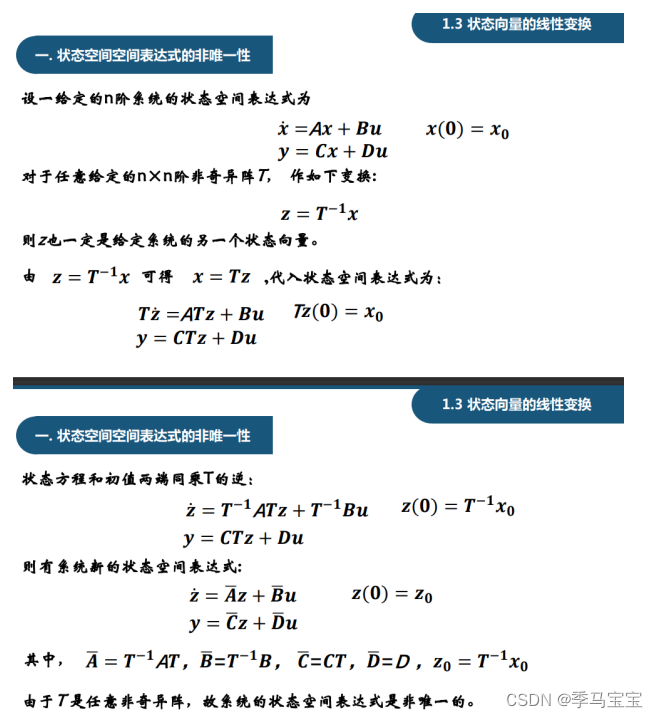
第二行 y y y表示输出,表达的是在目前状态和输入下,你会输出什么结果(你的传感器会检测到什么值),一般来说D=0,输出就是状态的反应。很重要一点:状态空间表述法不是唯一的,这其实很明显,你可以把 x = [ x 1 , x 2 ] T x=[x1,x2]^T x=[x1,x2]T变成 x = [ x 1 − x 2 , x 1 + x 2 ] T x=[x1-x2,x1+x2]^T x=[x1−x2,x1+x2]T,通过前面的状态变量可以算出后面,后面的也可以算出前面的。具体表现形式是这样的。
下一步一般来说会将如何根据传递函数写状态空间表达式,或者反过来,这我都不讲了。
状态空间求解
懒得写了。大家自己去学习如何求解吧
稳定性
自控是BIBO(有界输入,有界输出)。现控就不一样了,是给某一个状态加一个扰动,还能回到这个状态(更具体的可以看看这个李雅普诺夫稳定性判断)
懒得写了,以后再说。
-
相关阅读:
惊讶!投资人明目张胆套商业机密;AIGC招聘市场解读;超级个体公开课;如何说服客户购买AI产品 | ShowMeAI日报
UEFI统一可扩展固件接口
植物大战僵尸变态辅助开发系列教程(E语言实现和VC6实现)(上)
vue使用axios实现下载功能
Gitcode 创建仓库并且 提交代码
工程管理系统简介 工程管理系统源码 java工程管理系统 工程管理系统功能设计
cassandra安装及配置
TCP/IP之IP地址分类
WebView2 通过 PuppeteerSharp 实现爬取 王者 壁纸 (案例版)
LeetCode - #62 不同路径(Top 100)
- 原文地址:https://blog.csdn.net/qq_21043585/article/details/125494148