-
【毕业设计教程】通过单片机控制步进电机 - 物联网 嵌入式 stm32
1 简介
Hi,大家好,这里是丹成学长,今天向大家介绍如何使用单片机控制步进电机
大家可用于 课程设计 或 毕业设计
单片机-嵌入式毕设选题大全及项目分享:
https://blog.csdn.net/m0_71572576/article/details/125409052
2 步进电机介绍
步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步进角),多用于雕刻机、3D打印机等需要精确控制的设备。本篇使用ULN2003驱动五线四相减速步进电机。

- 步进电机每次能转动的最小角度叫做步距角。
- 每当步进电机接收到一个驱动信号后,步进电机将按照一定的方向转动一个固定的角度。
- 通过控制脉冲的个数来精确的控制步进电机的角位移量,通过控制脉冲的频率来控制电机转动的速度及加速度,从而达到调速的目的。
- 步进电机按照相数不同分为单相、双相、多相三种,励磁方式分为1相励磁方式和2相励磁方式。
- 本文使用的步进电机型号为28BYJ-48,1相励磁方式驱动,通过给ABCD四相依次通电来实现转自不停转动。
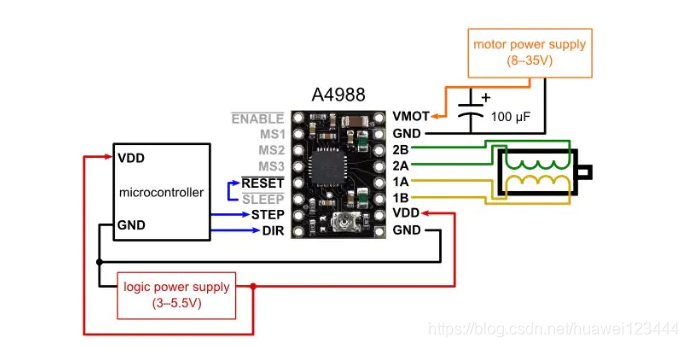
3 A4988驱动介绍
由于一般的开发板的通用IO驱动能力有限,有些外设不能直接使用IO进行驱动,需要借助一些驱动电路间接控制大功率器件。A4988是大电流驱动阵列,多用于单片机、智能仪表、PLC、数字量输出卡等控制电路中,可直接驱动继电器等负载。

4 电机启动代码
#include "a4988.h" #include "delay.h" /* STEP1 PDout(15) SDIR1 PGout(2) STEP2 PDout(14) SDIR2 PGout(3) STEP3 PDout(13) SDIR3 PGout(4) STEP4 PDout(12) SDIR4 PGout(5) MSTEP PDout(15) //固定芯片步进STEP MDIR PGout(2) //固定芯片步进DIR CSTEP PDout(14) //磁铁步进STEP CDIR PGout(3) //磁铁步进DIR RSTEP PDout(13) //蠕动泵STEP RDIR PGout(4) //蠕动泵DIR USTEP PDout(12) //超声步进电机STEP UDIR PGout(5) //超声步进电机DIR */ //方向脚初始化 void Step_DIR_Init(void) { GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOG, ENABLE); //使能PG端口时钟 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5; //端口配置 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz GPIO_Init(GPIOG, &GPIO_InitStructure); //根据设定参数初始化 GPIO_SetBits(GPIOG,GPIO_Pin_2); GPIO_SetBits(GPIOG,GPIO_Pin_3); GPIO_SetBits(GPIOG,GPIO_Pin_4); GPIO_SetBits(GPIOG,GPIO_Pin_5); } //脉冲初始化,公用定时器4,重映射,4路频率会被一起改变 void Step_Pulse_Init(u16 arr,u16 psc) { GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能定时器4时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD|RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟 GPIO_PinRemapConfig(GPIO_Remap_TIM4, ENABLE); //Timer4重映射 //设置该引脚为复用输出功能,输出TIM4的PWM脉冲波形 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15; //TIM_CH4 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOD, &GPIO_InitStructure);//初始化GPIO //!!!!!配置完复用功能后,此时输出为低电平,似乎难以修改 //初始化TIM4 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 //初始化TIM4 Channel_1234 PWM模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1 //TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Disable; //关闭比较输出使能 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高 TIM_OC1Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC1 //TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR1上的预装载寄存器 TIM_OC2Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC2 //TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR2上的预装载寄存器 TIM_OC3Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC3 //TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR3上的预装载寄存器 TIM_OC4Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC4 //TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR4上的预装载寄存器 TIM_CCxCmd(TIM4,TIM_Channel_1,TIM_CCx_Disable);//关闭TIM4通道1 TIM_CCxCmd(TIM4,TIM_Channel_2,TIM_CCx_Disable);//关闭TIM4通道2 TIM_CCxCmd(TIM4,TIM_Channel_3,TIM_CCx_Disable);//关闭TIM4通道3 TIM_CCxCmd(TIM4,TIM_Channel_4,TIM_CCx_Disable);//关闭TIM4通道4 TIM_Cmd(TIM4, DISABLE); //先不使能TIM4 } //芯片电机运动 void Mstep_move(u8 dir,u16 frequency) { MDIR = dir; Step_Pulse_Init((u16)(100000/frequency-1),719); TIM_SetCompare4(TIM4,(u16)(50000/frequency)); TIM_CCxCmd(TIM4,TIM_Channel_4,TIM_CCx_Enable);//开启TIM4通道4 TIM_Cmd(TIM4, ENABLE);//必须放在最后使能 } //芯片电机停止 void Mstep_stop(void) { TIM_SetCompare4(TIM4,0); TIM_CCxCmd(TIM4,TIM_Channel_1,TIM_CCx_Disable);//关闭TIM4通道1 TIM_CCxCmd(TIM4,TIM_Channel_2,TIM_CCx_Disable);//关闭TIM4通道2 TIM_CCxCmd(TIM4,TIM_Channel_3,TIM_CCx_Disable);//关闭TIM4通道3 TIM_CCxCmd(TIM4,TIM_Channel_4,TIM_CCx_Disable);//关闭TIM4通道4 TIM_Cmd(TIM4, DISABLE); } //磁铁电机运动 void Cstep_move(u8 dir,u16 frequency) { CDIR = dir; Step_Pulse_Init((u16)(100000/frequency-1),719); TIM_SetCompare3(TIM4,(u16)(50000/frequency)); TIM_CCxCmd(TIM4,TIM_Channel_3,TIM_CCx_Enable);//开启TIM4通道3 TIM_Cmd(TIM4, ENABLE);//必须放在最后使能 } //磁铁电机停止 void Cstep_stop(void) { TIM_SetCompare3(TIM4,0); TIM_CCxCmd(TIM4,TIM_Channel_1,TIM_CCx_Disable);//关闭TIM4通道1 TIM_CCxCmd(TIM4,TIM_Channel_2,TIM_CCx_Disable);//关闭TIM4通道2 TIM_CCxCmd(TIM4,TIM_Channel_3,TIM_CCx_Disable);//关闭TIM4通道3 TIM_CCxCmd(TIM4,TIM_Channel_4,TIM_CCx_Disable);//关闭TIM4通道4 TIM_Cmd(TIM4, DISABLE); } //超声电机运动 void Ustep_move(u8 dir,u16 frequency) { UDIR = dir; Step_Pulse_Init((u16)(100000/frequency-1),719); TIM_SetCompare1(TIM4,(u16)(50000/frequency)); TIM_CCxCmd(TIM4,TIM_Channel_1,TIM_CCx_Enable);//开启TIM4通道1 TIM_Cmd(TIM4, ENABLE);//必须放在最后使能 } //超声电机停止 void Ustep_stop(void) { TIM_SetCompare1(TIM4,0); TIM_CCxCmd(TIM4,TIM_Channel_1,TIM_CCx_Disable);//关闭TIM4通道1 TIM_CCxCmd(TIM4,TIM_Channel_2,TIM_CCx_Disable);//关闭TIM4通道2 TIM_CCxCmd(TIM4,TIM_Channel_3,TIM_CCx_Disable);//关闭TIM4通道3 TIM_CCxCmd(TIM4,TIM_Channel_4,TIM_CCx_Disable);//关闭TIM4通道4 TIM_Cmd(TIM4, DISABLE);//USTEP会随波形停在高或低 } //蠕动泵抽取 void Rstep_move(u8 dir,u16 frequency) { RDIR = dir; Step_Pulse_Init((u16)(100000/frequency-1),719); TIM_SetCompare2(TIM4,(u16)(50000/frequency)); TIM_CCxCmd(TIM4,TIM_Channel_2,TIM_CCx_Enable);//开启TIM4通道2 TIM_Cmd(TIM4, ENABLE);//必须放在最后使能 } //蠕动泵停止 void Rstep_stop(void) { TIM_SetCompare2(TIM4,0); TIM_CCxCmd(TIM4,TIM_Channel_1,TIM_CCx_Disable);//关闭TIM4通道1 TIM_CCxCmd(TIM4,TIM_Channel_2,TIM_CCx_Disable);//关闭TIM4通道2 TIM_CCxCmd(TIM4,TIM_Channel_3,TIM_CCx_Disable);//关闭TIM4通道3 TIM_CCxCmd(TIM4,TIM_Channel_4,TIM_CCx_Disable);//关闭TIM4通道4 TIM_Cmd(TIM4, DISABLE);//RSTEP会随波形停在高或低 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
单片机-嵌入式毕设选题大全及项目分享:
https://blog.csdn.net/m0_71572576/article/details/125409052
5 最后
-
相关阅读:
实战三十一:基于LightGCN推荐算法的推荐系统详细教程(代码+数据)
Elasticsearch - DSL 查询语句
AIGC 设计能替代真正的设计师设计吗?
Blender中的4种视图着色模式
Qt 实现实时语音通话功能
Java版分布式微服务云开发架构 Spring Cloud+Spring Boot+Mybatis 电子招标采购系统功能清单
爬虫小案例爬取塔某小说内容
【编程题】【Scratch四级】2020.06 正话反说
YB6502 5V输入双节串联磷酸铁锂电池升压充电芯片
对话框管理器第八章:对话框中的自定义导航
- 原文地址:https://blog.csdn.net/m0_71572576/article/details/125484556
