-
一文扫尽检测类评估指标:AP、mAP、ReCall、OKS和IoU

导读:如上PR曲线,XY坐标中的Recall/Precision分别代表什么?Recall,翻译成“召回率”,能理解啥意思不?甚至在姿态检测任务中也用这个作为评估指标。对他们好熟悉但说不准意思?本文,试图从举例出发,理解更复杂的mAP、AR,不在话下。
一、Recall & Precision
举个栗子:盒子里有10个球,5个黑球,5个红球。你想用机器人去找黑球,抓取6次返回结果分别是:黑 | 红 | 黑 | 黑 | 红 | 黑
那么,黑球的准确率为:
P r e c i s i o n ( 黑 ) = 4 6 Precision(黑) = \frac{4}{6} Precision(黑)=64
其Recall为:
R e c a l l ( 黑 ) = 4 5 Recall(黑) = \frac{4}{5} Recall(黑)=54通过对比,不难发现Precision和Recall的区别在于分母,即:
- Precision,准确率,分母是抓取的次数:6次。
- Recall,召回率,分母是某种类的总数:5个黑球
Recall,翻译成“查全率”,似乎更合适。两者总结为:
Precision Recall 查准率:检测到某种类的总数中的正确数量的百分比 查全率:实际检测出某种类的个数占该种类总数的百分比 二、mAP
还是上述栗子,假设有一个robot 1,它查10次的结果如下:

2.1 Recall
一共有5个黑球,即recall分母是5,那么对应1—>10次的Recall,计算如下:
1/5=0.2 1/5=0.2 2/5=0.4 2/5=0.4 2/5=0.4 3/5=0.6 3/5=0.6 3/5=0.6 4/5=0.8 5/5=1.0
2.2 Precision
precision:分母是会变化的,注意是实际检测的次数总数1—>10
1/1=1.0 1/2=0.5 2/3=0.67 2/4=0.5 2/5=0.4 3/6=0.5 3/7=0.43 3/8=0.375 4/9=0.44 5/10=0.5
2.3 AP
Average precision of Robot 1,即机器人Robot1识别黑球的准确率,计算如下:
A P ( c a s e 1 ) = ( 1.0 + 2 / 3 + 0.5 + 4 / 9 + 0.5 ) / 5 = 0.62 AP(case 1) = (1.0+2/3+0.5+4/9+0.5)/5=0.62 AP(case1)=(1.0+2/3+0.5+4/9+0.5)/5=0.622.4 mAP
假设换了一个盒子,里面有3个黑球,7个白球。10次结果如下:

Average precision of Robot 1在当前case下的平均识别率,计算如下:
A P ( c a s e 2 ) = ( 0.5 + 0.4 + 0.43 ) / 3 = 0.44 AP(case 2) = (0.5+0.4+0.43)/3=0.44 AP(case2)=(0.5+0.4+0.43)/3=0.44mean average precision,即计算在case1和case 2下的AP的均值,即
m A P ( c a s e 1 : c a s e 2 ) = ( 0.62 + 0.44 ) / 2 = 0.53 mAP(case1:case 2) = (0.62+0.44)/2=0.53 mAP(case1:case2)=(0.62+0.44)/2=0.53这里,case1 和case 2可以理解成不同阈值的情况。
三、IoU

IoU,即Intersection over Union,字面意思即可理解。交叉面积与合并面积的比值。扩展一点,IoU不能准确反应检测框的好坏,如
IoU相等,即重叠部分相等,但不重叠部分有多种情况
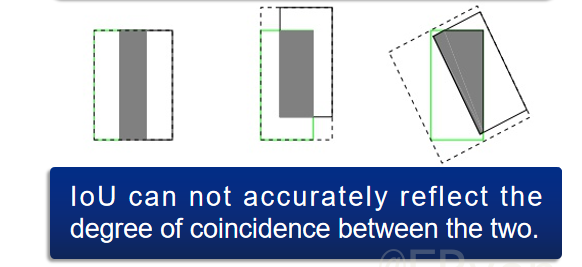
重叠部分相等,不重叠也相等,但中心点不一

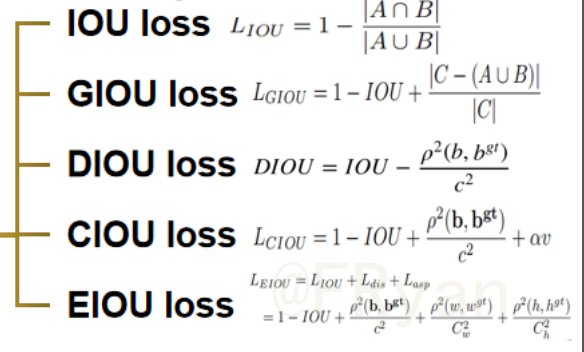
针对IoU中存在的不同情况,多种IoU类型可以在检测中使用,概览如下:
四、OKS (object keypoint similarity)
OKS(Object Keypoint Similarity),这个指标启发于目标检测中的IoU指标,目的就是为了计算真值和预测人体关键点的相似度。对一个人物p,OKS分数定义如下其定义如下:

d i d_i di表示编号为i的关键点欧式距离。有关OKS的详细理解,可参考博客:
https://blog.csdn.net/m0_37163827/article/details/84887811 -
相关阅读:
Java项目:鞋子商城系统(java+SSM+JSP+layui+bootstrap+echarts+Mysql)
接口测试异常场景耗时耗力?一文帮你解决
Vite + TypeScript + Node 开发一个简易脚手架
UVA 294 约数 Divisors
代理模式(Proxy Pattern) - 静态代理
UDP通信
NAT技术---网络地址转换
ElasticSearch Suggest Completion 智能补全技术 整合SpringBoot+Vue实现
yolov5 优化方法(四)修改bbox损失函数(补充EIOU,SIOU)
Docker系列--在容器中安装JDK的方法(有示例)
- 原文地址:https://blog.csdn.net/wqthaha/article/details/125479048