-
查找算法思想及代码——C语言
前言
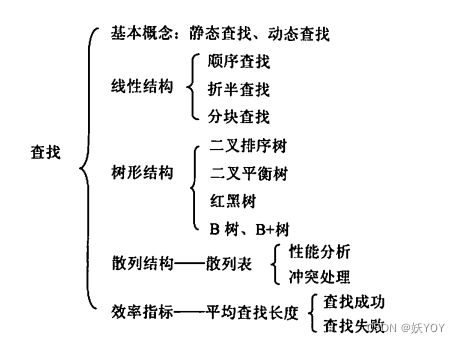
查找算法评价指标- 查找长度——在查找运算中需要对比关键字的次数称为查找长度
- 平均查找长度(ALS)——所有查找过程中进行关键字的比较次数的平均值,有成功查找和失败下的查找长度
对于哪个步骤不明白的可以在这里看下实际过程
顺序查找法
思想:从头到尾挨个找(反过来也行)
顺序查找时间复杂度: O ( n ) O(n) O(n)
代码:#define MAXSIZE 100 typedef int ElemType; typedef struct{ //查找表的数据结构(顺序表) ElemType *elem; //动态数组基址 int TableLen; //表的长度 }SSTable; //顺序查找 int Search_Seq(SSTable ST, ElemType key){ int i; for(i=0; i<ST.TableLen && ST.elem[i] !=key; i++); //查找成功,则返回元素下标;查找失败,则返回-1 return i==ST.TableLen? -1 : i; } //“哨兵” int Search_Seq_(SSTable ST, ElemType key){ //数据从下标1开始存储 ST.elem[0]=key; //“哨兵” int i; for(i=ST.TableLen; ST.elem[i]!=key; i--); //从后往前找 return i; //查找成功,则返回元素下标;查找失败,则返回0 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
折半查找法
又称“二分查找”,仅适用于有序的顺序表
折半查找时间复杂度= O ( log 2 n ) O(\log_2n) O(log2n)
代码://结构体 typedef struct{ ElemType *elem; int length; }SSTable; int Search_Bin(SSTable ST,ElemType key){ // 在有序表ST中折半查找其关键字等于key的数据元素。 // 若找到,则函数值为该元素在表中的位置,否则为-1。 int low=0,high=ST.length-1; //置查找区间初值 int mid; while(low <= high){ mid = (low+high)/2; if(key==ST.elem[mid]) return mid; //找到待查元素 else if(key<ST.R[mid].key) high = mid -1; //继续在前半部分查找 else low = mid + 1; //继续在后半部分查找 } return -1; //表中不存在待查元素 }// Search_Bin- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22

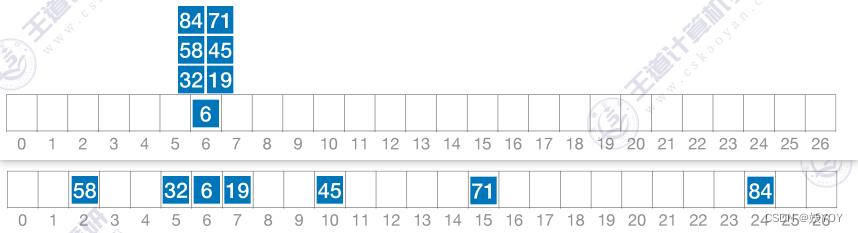
分块查找法
思想:
索引表中记录每个分块的最大关键字、分块的区间;
先查索引表(顺序或折半),再对分块内进行顺序查找。
块内无序,块间有序

设索引查找和块内查找的平均查找长度分别为 L 1 L_1 L1、 L s L_s Ls,则分块查找的平均查找长度为 A S L = L 1 + L s ASL=L_1 + L_s ASL=L1+Ls
A L S = s 2 + 2 s + n 2 s , 当 s = n 时 , A L S 最 小 = n + 1 ALS = \frac{s^2+2s+n}{2s},当s=\sqrt n时,ALS_{最小}=\sqrt{n}+1 ALS=2ss2+2s+n,当s=n时,ALS最小=n+1树形查找法
n个结点的二叉树最小高度为 ⌊ log 2 n ⌋ + 1 \lfloor{\log_2n}\rfloor + 1 ⌊log2n⌋+1 或是 ⌈ log 2 ( n + 1 ) ⌉ \lceil{\log_2(n+1)}\rceil ⌈log2(n+1)⌉
对具有n个关键字的树型结构,具有n+1个叶结点二叉排序树,BST
粘一下定义,简单的说就是,左子树节点值 ≤ \leq ≤ 根节点值 ≤ \leq ≤ 右子树结点值

[-] 查找思路:
若树非空,目标值与节点的值比较:
若相等,则查找成功;
若小于根节点,则在左子树上查找,否则在右子树上查找;
查找成功返回节点指针,失败返回NULL下面是个完整的代码,包括构建二叉树,查找,删除和中序遍历:
#include<iostream> using namespace std; //结构体,二叉排序树节点 typedef struct BSTNode{ int data; struct BSTNode *lchild, *rchild; }BSTNode, *BSTree; //二叉排序树中查找值为data的节点 //非递归,循环 BSTNode *BST_Search(BSTree T, int key){ while(T != NULL && key != T->data){ //若树空(未找到),或等于根节点值,则结束循环 if(key < T->data) T = T->lchild; //小于,在左子树上查找 else T = T->rchild; //大于,在右子树上查找 } return T; } //递归查找 BSTNode *SearchBST(BSTree T, int key){ if(T == NULL) return NULL; //查找失败 if(key == T->data) return T; //查找成功 else if (key < T->data) return SearchBST(T->lchild, key); //在左子树查找 else return SearchBST(T->rchild, key); //在右子树查找 } //插入 ,递归 void InsertBST(BSTree &T,int e){ if(T == NULL){ //!T //找到插入位置,叶子节点(或根) BSTree S = new BSTNode; //生成新结点S S->data = e; //新结点S的关键字为e S->lchild = S->rchild = NULL; //新结点S作为叶子结点 T = S; //把新结点S链接到已找到的插入位置 } //这里不考虑相同的数字,有相同的数只算一个 else if (e< T->data) InsertBST(T->lchild, e ); //将S插入左子树 else if (e> T->data) InsertBST(T->rchild, e); //将S插入右子树 }// InsertBST void CreateBST(BSTree &T ) { //依次读入一个关键字为key的结点,将此结点插入二叉排序树T中 T=NULL; int e; cout<<"请输入若干整数,用空格分开,以-1结束输入"<<endl; cin>>e; while(e != -1){ //-1,结束标志 InsertBST(T, e); //将此结点插入二叉排序树T中 cin>>e; } }//CreatBST void DeleteBST(BSTree &T,int key) { //从二叉排序树T中删除关键字等于key的结点 BSTree p=T; BSTree f=NULL; //初始化 BSTree q,s; while(p){ //从根开始查找关键字等于key的结点*p if (p->data == key) break; //找到关键字等于key的结点*p,结束循环 f=p; //*f为*p的双亲结点 if(p->data> key) p=p->lchild; //在*p的左子树中继续查找 else p=p->rchild; //在*p的右子树中继续查找 }//while if(!p) return; //p==NULL //找不到被删结点则返回 /*―考虑三种情况实现p所指子树内部的处理:*p左右子树均不空、无右子树、无左子树―*/ if((p->lchild) && (p->rchild)){ //被删结点*p左右子树均不空 q = p; s = p->lchild; while (s->rchild) //在*p的左子树中继续查找其前驱结点,即最右下结点 {q = s; s = s->rchild;} //向右到尽头 p->data = s->data; //s指向被删结点的“前驱” if(q!=p){ q->rchild = s->lchild; //重接*q的右子树 } else q->lchild = s->lchild; //重接*q的左子树 delete s; }else{ if(!p->rchild){ //被删结点*p无右子树,只需重接其左子树 q = p; p = p->lchild; } else if(!p->lchild){ //被删结点*p无左子树,只需重接其右子树 q = p; p = p->rchild; } /*―――――将p所指的子树挂接到其双亲结点*f相应的位置―――――*/ if(!f) T=p; //被删结点为根结点 else if (q==f->lchild) f->lchild = p; //挂接到*f的左子树位置 else f->rchild = p; //挂接到*f的右子树位置 delete q; } }//DeleteBST //中序遍历 void InOrderTraverse(BSTree &T){ if(T){ InOrderTraverse(T->lchild); cout<<T->data<<" "; InOrderTraverse(T->rchild); } } int main() { BSTree T; CreateBST(T); //相同的数只算一个 cout<<"当前有序二叉树中序遍历结果为:"<<endl; InOrderTraverse(T); int key;//待查找或待删除内容 cout<<"\n\n请输入待查找关键字(整数):"<<endl; cin>>key; BSTree result_1=BST_Search(T,key); //循环查找 BSTree result_2=SearchBST(T,key); //递归查找 if(result_1 && result_2) cout<<"循环和递归都,找到了关键字"<<key<<endl; else cout<<"未找到"<<key<<endl; cout<<"\n请输入待删除的关键字:"<<endl; cin>>key; DeleteBST(T,key); cout<<"当前有序二叉树中序遍历结果为(删除后):"<<endl; InOrderTraverse(T); return 1; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137

平衡二叉排序树,AVL
AVL Tree链接
∣ 左 子 树 高 − 右 子 树 高 ∣ ≤ 1 \lvert 左子树高 -右子树高 \rvert \leq 1 ∣左子树高−右子树高∣≤1,平衡因子只可取-1、0或1。
插入,四种情况
1)LL,右单旋转

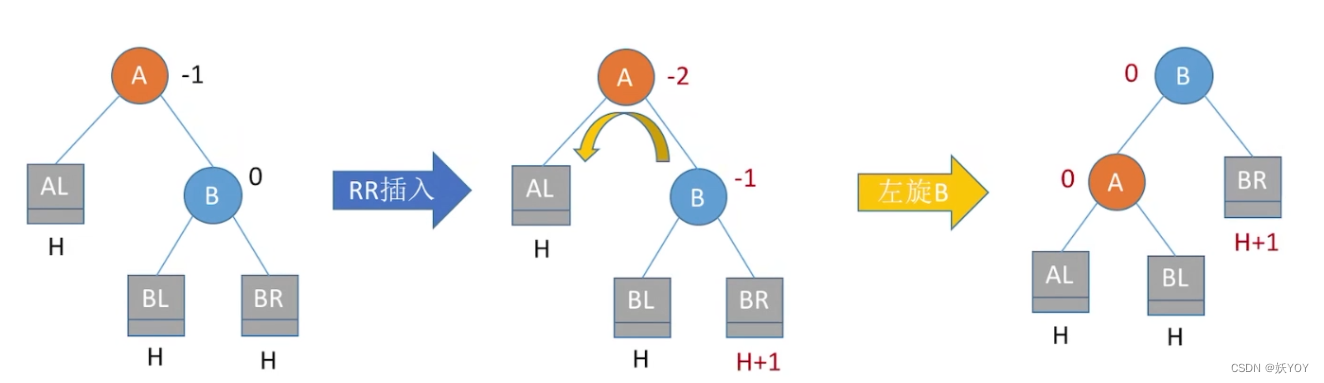
2)RR,左单旋转
3)LR,左旋,右旋
4)RL,右旋,左旋

删除,步骤:
①删除节点(方法同,二叉排序树)- 若删除的节点是叶子,直接删;
- 若删除的节点只有一个子树,用子树顶替删除位置;
- 若删除的节点有两棵子树,用前驱(或后继)结点顶替,并转化未对前驱(或后继)结点的删除。
②一路向上找到最小不平衡子树,找不到就over
③找最小不平衡子树下,”个头“最高的儿子,孙子
④根据孙子的位置,调整平衡(LL/RR/LR/RL)- 孙子在LL:儿子右单旋;
- 孙子在RR:儿子左单旋;
- 孙子在LR:孙子先左旋,再右旋;
- 孙子再RL:孙子先右旋,再左旋;
⑤如果不平衡向上传导,继续②
红黑树,RBT
为什么要发明 红黑树:

简要特点:
左右跟,根叶黑
不红红,黑路同详细特点:
左子树结点值 ≤ \leq ≤ 根结点值 ≤ \leq ≤ 右子树结点值
①每个结点或是红色,或是黑色的;
②根节点是黑色的;
③叶结点(外部结点、NULL结点、失败结点)均是黑色的;
④不存在两个相邻的红结点(即红结点的父节点和孩子结点均是黑色);
⑤对每个结点,从该节点到任一叶结点的简单路径上,所含黑结点的数目相同;
插入,这张图xswl

- 黑叔




- 红叔

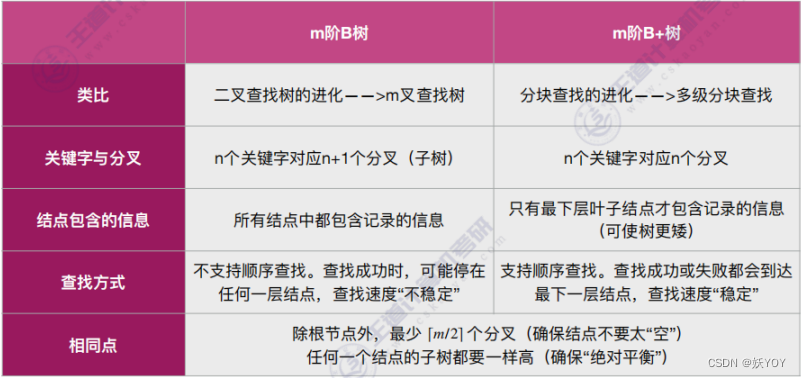
B树

令 k = ⌈ m / 2 ⌉ k=\lceil{m/2}\rceil k=⌈m/2⌉
高 度 为 h 的 m 阶 B 树 , 含 有 关 键 字 个 数 至 少 是 : 2 ⋅ k h − 1 − 1 高度为h的m阶B树,含有关键字个数至少是:2 \cdot k^{h-1}-1 高度为h的m阶B树,含有关键字个数至少是:2⋅kh−1−1
1 + 2 ( k − 1 ) ( k 0 + k 1 + ⋯ + k h − 2 ) = 1 + 2 ( k h − 1 − 1 ) = 2 ⋅ k h − 1 − 1 1+2(k-1)(k^0+k^1+\cdots+k^{h-2}) = 1+2(k^{h-1}-1) = 2 \cdot k^{h-1}-1 1+2(k−1)(k0+k1+⋯+kh−2)=1+2(kh−1−1)=2⋅kh−1−1
高度为h的3阶B树,含有关键字个数至少是: 2 h − 1 2^h-1 2h−1,同完全二叉树(满二叉)
高度为h的5阶B树,含有关键字个数至少是: 2 ⋅ 3 h − 1 − 1 2 \cdot 3^{h-1}-1 2⋅3h−1−1高度为h的完全二叉树至少 2 h − 1 2^{h-1} 2h−1个结点,最多 2 h − 1 2^{h}-1 2h−1个结点
下面说明下B树特征和形状,先来个5叉树,B树就是在多叉树加一些约束,

B树结构:

对于高度问题,


对于插入,看不懂跳过:

插入和删除:

B+树
- B+树有点像是分块查找结构和B树的整合,只在叶子结点存信息,非叶结点仅(上面的)起索引作用,查找也是找到最下层;
- B+树支持顺序查找和随机查找,叶子结点本身依关键字从小到大顺序链接
- 根据B+树的特征,在操作系统中用的挺多,从磁盘里读数据到内存、关系型数据库的“索引”(如MySQL)。

散列表(哈希表)
还是用图片粘上吧:


装填因子 α \alpha α越大,平均查找长度变大,“冲突”越多,查找效率越低
常见的散列函数
- 直接定址法, H ( k e y ) = k e y 或 H ( k e y ) = a × k e y + b H(key) = key 或H(key) = a \times key + b H(key)=key或H(key)=a×key+b
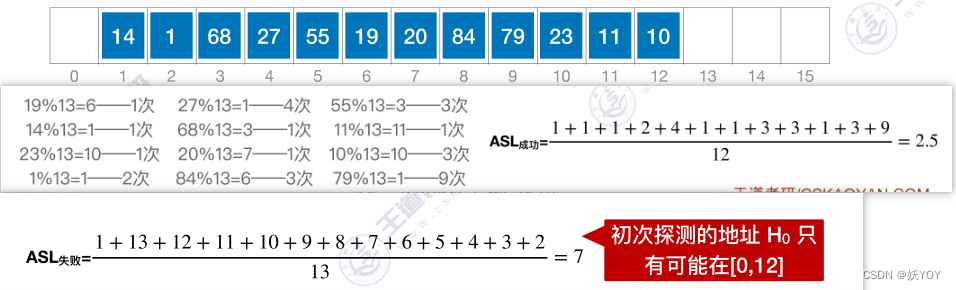
- 除留余数法, H ( k e y ) = k e y % p H(key) = key \% p H(key)=key%p,p取不大于散列表长度m但最接近或等于m的质数
- 数字分析法,设关键字是r进制数(如十进制数) ,而r个数码在各位上出现的频率不一定相同,可能在某些位上分布均匀一些,每种数码出现的机会均等;而在某些位上分布不均匀,只有某几种数码经常出现,此时可选取数码分布较为均匀的若干位作为散列地址。这种方法适合于已知的关键字集合,若更换了关键字,则需要重新构造新的散列函数。例:手机号后四位
- 平方取中法,这种方法得到的散列地址与关键字的每位都有关系,得到的散列地址分布比较均匀,适用于关键字的每位取值都不够均匀或均小于三别地址所需的位数
处理冲突方法
- 拉链法,下图:

- 开放定址法,下图:

-
①线性探测法: d i = 0 , 1 , 2 , 3 , ⋯ , m − 1 d_i=0,1,2,3,\cdots,m-1 di=0,1,2,3,⋯,m−1,即发生冲突时,每次往后探测相邻的下一个单元是否为空。线性探测法很容易造成同义词、非同义词的“聚集(堆积)”现象,严重影响查找效率产生原因——冲突后再探测一定是放在某个连续的位置。
查找效率分析:
-
②平方探测法,当 d i = 0 2 , 1 2 , − 1 2 , 2 2 , − 2 2 , ⋯ , k 2 , − k 2 d_i=0^2, 1^2, -1^2, 2^2, -2^2, \cdots , k^2, -k^2 di=02,12,−12,22,−22,⋯,k2,−k2时,称为平方探测法,又称二次探测法,其中 k ≤ m / 2 k \leq m/2 k≤m/2。比起线性探测法更不容易产生“聚集(堆积)”问题。
-
③伪随机序列法, d i d_i di是一个伪随机序列,自己定义的,如 d i = 0 , 3 , 5 , 11 , … di= 0, 3, 5, 11, \ldots di=0,3,5,11,…
-
④再散列法(再哈希法):除了原始的散列函数 H ( k e y ) H(key) H(key)之外,多准备几个散列函数,当散列函数冲突时,用下一个散列函数计算一个新地址,直到不冲突为止。
-
-
相关阅读:
Neodynamic Barcode Professional for Windows Forms 14.0
如果你不只是个点工,那你应该知道 前后端分离与不分离的区别
2023 年全国大学生数学建模A题目-定日镜场的优化设计
【前端设计模式】之单例模式
用于显著提高检索速度和降低成本的二进制和标量嵌入量化
领域驱动设计
DHCP和PPPoE协议以及抓包分析
Pgzero飞机大战
OS | 【四 文件管理】强化阶段大题解构
ssm健康饮食推荐系统分析与设计毕业设计源码261631
- 原文地址:https://blog.csdn.net/weixin_45788069/article/details/125480517

