-
RealSense D435 的开发日记
🌞欢迎来到机器学习的世界
🌈博客主页:卿云阁💌欢迎关注🎉点赞👍收藏⭐️留言📝
🌟本文由卿云阁原创!
🌠本阶段属于练气阶段,希望各位仙友顺利完成突破
📆首发时间:🌹2021年6月22日🌹
✉️希望可以和大家一起完成进阶之路!
🙏作者水平很有限,如果发现错误,请留言轰炸哦!万分感谢!
6月22日 星期三 天气晴
目录

🍈 一、与RealSense的初识
最近,想写篇论文,苦于没有方向,我找到了老师,发现这个方向可以出论文,为此我开始了我艰难的学习之路。虽然Intel官网上RealSense相机看起来都很大的样子,但其实真正拿到手里会发现其实是非常小巧的。

🍉二. D435i硬件结构及各个组件原理详解
其集成了两个红外传感器(IR Stereo Camera)、一个红外激光发射器(IR Projector)和一个彩色相机(Color Camera)。
立体深度相机系统主要包括两部分:视觉处理器D4和深度模块。主机处理器连接 USB 2.0 / USB 3.1 Gen 1。
深度模块采用立体视觉的左右成像器、可选的红外激光发射器和 RGB 色彩传感器。


工作原理
其原理是基于三角测量法,左右红外相机进行测量深度,中间红外点阵投射器相当于补光灯,不打开也能测深度,只是效果不好;最右边的rgb相机用于采集彩色图片,最终可以将彩色视频流与深度流进行对齐。
基于左右图像的视差来求得距离。只是相比于普通彩色rgb相机,红外ir相机是用来接收目标返回的红外光线的,得到的是左右两幅红外灰度图像。若把屋里灯光关掉,黑暗的环境,红外ir相机一样可以生成深度图像,只是质量略有下降。

、
🍊三、测试与使用
RGB Module可以显示RGB影像,Stereo Module可以开启深度图显示
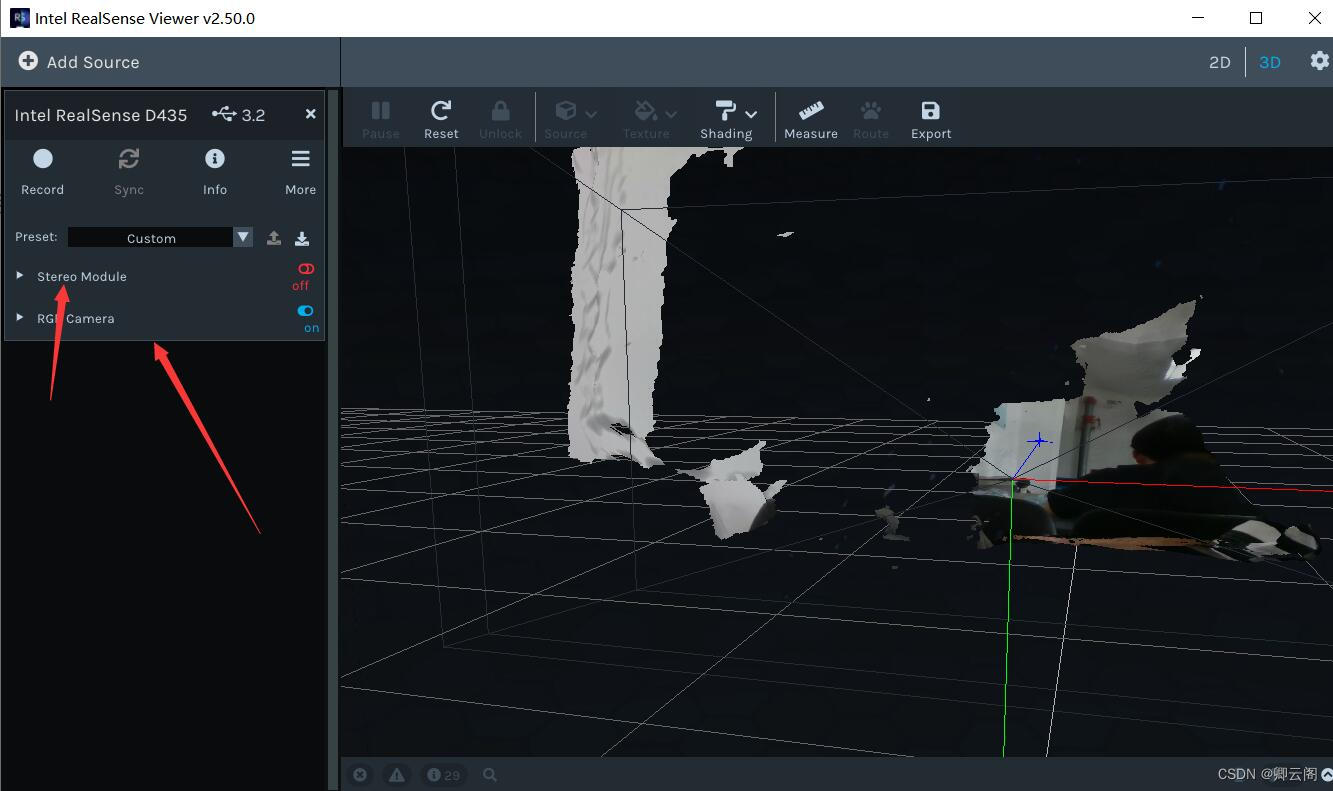
如果可以正常显示上图中的画面,那么就说明RealSense的基本配置就成功了,可以向电脑传输数据了
🍋四、Python接口的安装与使用
Python的接口安装其实非常简单,
pip一行命令即可。pip install pyrealsense2下面内容取自PyRealSense2包的介绍页面
- import pyrealsense2 as rs
- pipe = rs.pipeline()
- profile = pipe.start()
- try:
- for i in range(0, 100):
- frames = pipe.wait_for_frames()
- for f in frames:
- print(f.profile)
- finally:
- pipe.stop()

就说明安装是成功的了。
🍍五、显示彩色图和深度图
- import pyrealsense2 as rs
- import numpy as np
- import cv2
- if __name__ == "__main__":
- # Configure depth and color streams
- pipeline = rs.pipeline()
- config = rs.config()
- config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
- config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
- # Start streaming
- pipeline.start(config)
- try:
- while True:
- # Wait for a coherent pair of frames: depth and color
- frames = pipeline.wait_for_frames()
- depth_frame = frames.get_depth_frame()
- color_frame = frames.get_color_frame()
- if not depth_frame or not color_frame:
- continue
- # Convert images to numpy arrays
- depth_image = np.asanyarray(depth_frame.get_data())
- color_image = np.asanyarray(color_frame.get_data())
- # Apply colormap on depth image (image must be converted to 8-bit per pixel first)
- depth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.03), cv2.COLORMAP_JET)
- # Stack both images horizontally
- images = np.hstack((color_image, depth_colormap))
- # Show images
- cv2.namedWindow('RealSense', cv2.WINDOW_AUTOSIZE)
- cv2.imshow('RealSense', images)
- key = cv2.waitKey(1)
- # Press esc or 'q' to close the image window
- if key & 0xFF == ord('q') or key == 27:
- cv2.destroyAllWindows()
- break
- finally:
- # Stop streaming
- pipeline.stop()

-
相关阅读:
尚硅谷设计模式学习(十八)观察者模式
车载语音识别系统语音数据采集标注案例
QT 5.15向服务器发送POST请求,接收并解析服务器的响应数据(嵌套解析JSON数据)
通信用多模光纤主要有哪些类型?OM1~OM5有什么区别
Java List
微服务分布式架构中,如何实现优雅发版?
猫罐头怎么选择?市面上最受欢迎的5款猫罐头推荐!
Unity WebGL ios 跳转URL
Jmeter——结合Allure展示测试报告
_Linux 静态库
- 原文地址:https://blog.csdn.net/zzqingyun/article/details/125408342