-
硬件开发(一)DRV2667芯片的开发指南!
前言
最近在准备一些事情,需要将5V电压升压到200Vpp来驱动压电陶瓷片。
笔者在经过一系列漫长而乏味的调研后(包括电压泵升压电路、反激式升压电路等),最后终于找到了DRV2667这款芯片。看着数据手册感觉各方面都符合需求,还可编程,于是便觉得这也太棒了!便想狠狠地尝试使用。
这个芯片的开发文档很少!这也导致笔者的推进异常艰难,尤其是对一位硬件新手而言。目前已经是重绘第三版测试板了,才终于跑通了一遍输出。为了继往开来,方便自己整理和查阅,也方便其他人进行借鉴,笔者将使用的方法和踩过的坑一并整理一个文档,来记录该芯片的使用。创作不易,请多包涵!
这篇文章将分为硬件层面和软件层面去详细讲解重点部分,同时会附上代码案例。话不多说,马上开始!
-
硬件绘制使用嘉立创EDA,而软件层面的IDE是keil5。
-
阅读该文章需要较为基本的硬件基础(会点灯就行),且至少对较为基础的通信方式和硬件开发流程有所了解。
-
更详细的技术细节还请阅读数据手册。本文主要着墨于实现的过程和踩过的坑,并不会详细到连画板子的线宽怎么设置都介绍出来。读者请按需所取。
-
如果本文有一些不正确或者不对的地方,欢迎随时批评指正!笔者将感谢不尽!
一、DRV2667概述
1、芯片简介
让我们先看看比较官方的介绍:
DRV2667是德州仪器(Texas Instruments)生产的一款压电式触觉驱动器。它具有集成的105V升压转换器、波形存储器和数字模拟转换器(DAC)。这款驱动器专为控制压电执行器而设计,能够提供40Vpp到200Vpp之间的电压。DRV2667通过包含一个集成的105V升压转换器和200Vpp差分输出放大器,简化了驱动压电的设计复杂性。此外,它还支持通过I2C接口或模拟输入进行高清触觉控制。
让我们用一句话总结一下,它其实就是一片能够升压到最高200Vpp的压电驱动芯片。并且,还是可编程、通过I2C通信控制的压电驱动芯片。

DRV2667的外观图。它的封装为QFN-20,有20个引脚。 它还有一个十分优秀的特点,那就是足够小!一张芯片的尺寸为4mm x 4mm,大小差不多和一只手的小拇指指盖的一半那样大。因此,这款压电驱动芯片很适合在各类小型化、微型化的场所使用。
不得不提及的是,DRV2667本质上是一个电荷泵升压电路!就是下面这个玩意儿:

Dickson Charge Pump. 而Ti公司在该电路的基础上进行了很多改进和完善,并且提供了标准化的单片机接口。因此这个的功能真的强大!以至于他们公司内部人员称之为“一件小巧玲珑的艺术品”。
但是,他的使用总归是有局限性的吧!让我们看看他的负载是什么样子的。
2、输出负载
压电陶瓷一般都是容性负载。因此,我们很有必要看看他的输出究竟能够驱动怎样的压电陶瓷片。
根据数据手册,他的负载情况是这样的:
-
能在200Vpp、300Hz的输出下驱动100nF的负载;
-
能在150Vpp、300Hz的输出下驱动150nF的负载;
-
能在100Vpp、300Hz的输出下驱动330nF的负载;
-
能在50Vpp、680Hz的输出下驱动680nF的负载。

数据手册中的负载详情。 笔者的需求是在让输出电压在200Vpp下驱动大致80nF~100nF的压电陶瓷片,比较符合笔者的要求!
接下来,让我们跳过那些繁琐的芯片特征的技术细节,直接进入到开发阶段,看看我们要使用它,还需要做些什么。
二、硬件设计
在原始的数据手册中,他给出了这样的一种使用简例。让我们来看看。

原始的使用例程。 看不懂没有关系,让笔者来介绍其中比较重要的部分。
1、决定升压能力的引脚:FB
DRV2667的升压增益是由硬件和软件共同决定的。这部分由FB引脚决定。
FB全称为反馈引脚(feedback pin)。它将给升压输出电压(boost output voltage, 𝑉(𝐵𝑆𝑇) )输出一个特定的电压值,通过电阻分压的方式提供一个 𝑉(𝐵𝑆𝑇) 的高直流电压。
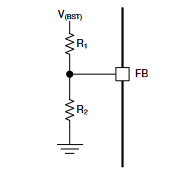
FB外部电阻分压编程。 𝑉(𝐵𝑆𝑇) 决定了最后正弦波输出的值的大小。它必须要比我要求的输出的峰值的大小大5V作用(即假设我要求我的输出的峰值为100V,那我的 𝑉(𝐵𝑆𝑇) 必须得达到105V),否则可能会降低元器件的使用寿命。
𝑉(𝐵𝑆𝑇) 和 𝑉(𝐹𝐵) 有个相关的计算公式,如下所示:
𝑉(𝐵𝑆𝑇)=𝑉(𝐹𝐵)⋅(1+𝑅1𝑅2)
在按照这个公式计算的同时,还有个限制,就是要求R1和R2之和必须大于400kΩ,同时单个电阻阻值必须小于1MΩ。前者是为了防止电阻分压器的漏电流变得很大,后者则是防止PCB污染。
原先的数据手册给出了一个比较适合的升压电压阻值的给定值,并总结成了一个表格。具体如下所示:
R1
R2
软件编程时的增益大小[1:0]
V(BST)
输出最大振幅的电压峰值
402kΩ
16.2kΩ
00
30
25
392kΩ
9.76kΩ
01
55
50
768kΩ
13kΩ
10
80
75
768kΩ
9.76kΩ
11
105
100
PVDD和BST两个引脚必须相连!PVDD 是为压电式驱动器供电的高压电源,正好需要BST的电压输出供给!否则你的输出将会是一条完整平滑的直线!
最后也是最关键的一点:如果我要求我的芯片输出的幅值要大于我的 𝑉(𝐵𝑆𝑇) 的话,就会产生削波现象!此时你的正弦波将变成一个梯形波的模样。同时,也会导致芯片的过热情况发生,降低芯片的使用寿命。
2、与单片机通信的引脚:SDA/SDL
DRV2667和单片机通信使用的是I2C通信。因此,自然使用的是SDA和SCL连接。该部分除了单片机直连外,还需要上拉电阻来增强驱动能力。上拉电阻阻值大小一般为2.2kΩ。
本人使用的是STM32F103C8T6作为主控板,相应的引脚部分为PB6(SDL)和PB7(SDA)。测试使用时直接杜邦线相连即可。未来要集成为一块板子的时候再说。
3、相关元器件选型
有了大致的草图简例,接下来就是相关的元器件选型。下面是数据手册推荐的值的选取:
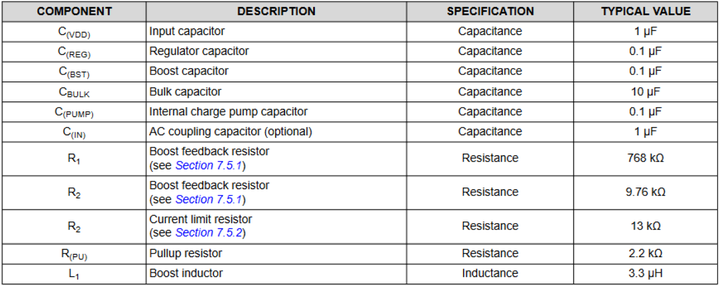
元器件选型相关。 其中,选型有非常多需要注意的部分!笔者在此踩了很多坑了。
-
PUMP 引脚为电荷泵的相关输出。因此必须在该引脚上放置额定电压为 10 V 或更高的 0.1 μF 的 X5R 或 X7R 的存储电容,来为内部节点提供栅极驱动。额定电压过小很容易烧板子!
-
其中的唯一一个大电感L1的选择对 DRV2667 器件的性能起到至关重要的作用。它和SW引脚直接相连。而SW引脚是负责控制内部升压开关的。该电感选取范围为 3.3 μH 至 22 μH。选取时,请务必考虑电感的额定电流和饱和电流是多少!否则,波形很有可能会失真。
-
BST引脚引出来的电容是十分关键且重要的!因为V(BST)的电压值最大可以达到105V!建议使用额定电压为 250 V 的 X5R 或 X7R 型 100-nF 电容是最好的,否则就会出现2-1节阐述过的问题!
4、元器件布局
注意,布局的时候有个很关键的地方:负责升压编程的电阻(R1 和 R2)尽可能靠近器件的 FB 引脚。必须避免 FB 引脚靠近 SW 引脚。
官方给出的参考布局长这样:
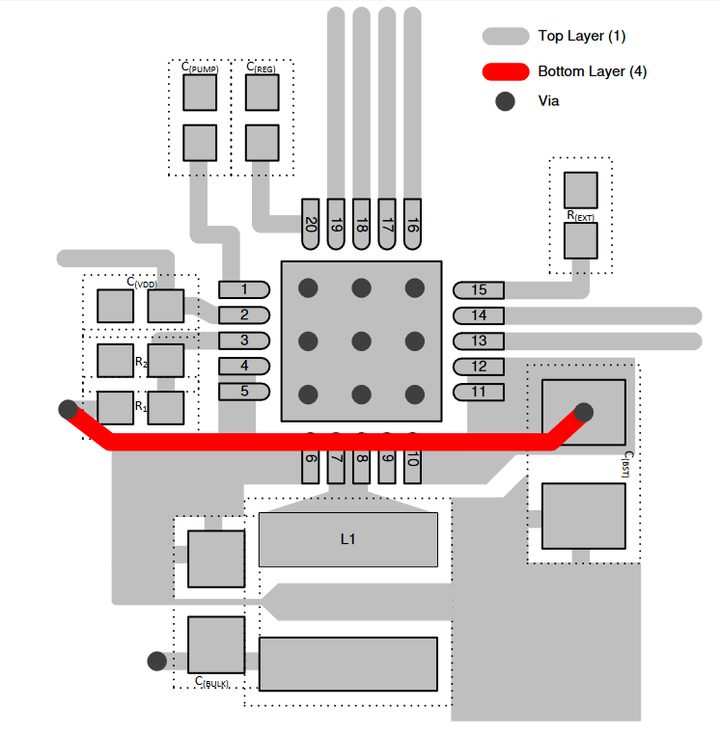
官方给出的布局参考。 而芯片的各个引脚参考如下:

QFN封装的引脚参考图。 结合前面给出的简例图,差不多大致就可以搭建一个属于自己的小电路板啦。
5、笔者测试版绘制
笔者已经绘制了三版测试板了,最后一版终于可以使用!
处于一些考虑,笔者的原理图便不放上来了,有需求的可以私信笔者(让笔者恰点米)。但是各个方面实际上和数据手册中的要求大差不差。
眼尖的读者可以发现,笔者这里使用了一个常见的分压模块TPS73633,用来供给SDA和SDL一个合适的上拉电压(3.3V)。DRV2667的Vdd端需要5V电压供给,因此才使用这么一个分压模块。这样可以直接简化测试板输入,直接导入5V电压即可。

测试板的3D布局图。 板子整体采用免费的FR-4,之后可能会换成更加轻便且实用的FPC。差分输出通过两个焊盘引出。测量单个输出的峰峰值并x2,就是整体差分输出的峰峰值啦!
硬件部分差不多结束之后,接下来就是软件代码的撰写。
三、软件设计
软件设计其实相较于硬件设计来说,相对简单一些,因为它比硬件找bug容易一些。硬件稍一不留神一个BUG,就需要整块板子重绘,废材又费力;而软件相对来说试错成本更低,也更加好用。
笔者将从通信方式、内部存储以及代码撰写三个方面来介绍该芯片的软件部分。
1、I2C通信
DRV2667采用I2C通信。这是一种十分简单的通信方式,只需要两根引脚就可以实现。
I2C 总线使用两个信号,即 SDA和 SCL在系统中的集成电路之间进行通信。
总线以串行方式传输数据,每次传输一位。总线上传输的每个字节都由接收设备通过确认位确认。每次传输操作从主设备在总线上驱动启动条件开始,到主设备在总线上驱动停止条件结束。
总线利用SDA上的电平转换来指示启动和停止条件。SDA 信号从高电平到低电平的转换表示启动,从低电平到高电平的转换表示停止。正常的数据位转换必须发生在时钟周期的低电平时间内。
我们如果要发送一个字节到DRV2667芯片的寄存器中,我们需要严格按照I2C的时序。写入字节并等待应答。

写入单个字节帧的时序。 如上图,首先,我们需要发送需要查询的从机地址,然后等待从机发出的响应信号;此时从机进入信息地址查询状态;在这一步,我们需要注意一点,那就是从机地址必须左移一位,并且将末位位置为1或0。末位是读写位,0为写,1为读。
当主机接受到响应信号后,主机继续发送需要访问的寄存器地址,并等待从机的响应信号。
接收到响应信号后,主机再最后发出需要写入的字节数据,从机将以响应信号返回成功的结果。最终以主机发送的停止信号作为结尾。
看着是不是看不懂?让我们用实际代码来看看吧:
- u8 I2C_WriteByte(uint8_t device_addr,uint16_t addr,uint8_t data) {
- IIC_Start();
- IIC_Send_Byte((device_addr<<1));//发从机地址
- if(IIC_Wait_Ack()==1){ IIC_Stop(); return 0; } IIC_Send_Byte(addr);//发要写入地址;
- if(IIC_Wait_Ack()==1){ IIC_Stop(); return 0; } IIC_Send_Byte(data);//发要写入数据;
- if(IIC_Wait_Ack()==1){ IIC_Stop(); return 0; }
- IIC_Stop();
- delay_ms(1);
- return 1;
- }
这里就强调了一遍:从机地址必须左移1位,并将尾位置为0,才能说明是写。DRV2667的从机地址为0x59,则实际写入的从机地址是0xB2,需要读取的从机地址为0xB3。
喜欢举一反三的读者就会想,那是不是读取的数据只用修改从机地址的末位为0就行了?其实没有这么简单!
读取I2C的相应寄存器数据的时序如下图所示:

读取单个字节的时序。 首先,我们需要发送需要查询的从机地址,然后等待从机发出的响应信号;此时的从机地址是以“写”的方式发送的。
当主机接受到响应信号后,主机继续发送需要访问的寄存器地址,并等待从机的响应信号。这两步和普通的写入过程没有区别。
区别在下面部分:此时主机发送的不再是字节部分,而是重新发送起始信号,这将使得从机进入可读状态。这时再写入地址,下次从机发送的信号就是可读数据了。我们接受就好!
相应的代码如下所示:
- uint8_t I2C_ReadByte(uint8_t device_addr,uint16_t addr,uint8_t ByteNumToRead) //读寄存器或读数据
- {
- uint8_t read_data=0;
- IIC_Start();
- IIC_Send_Byte((device_addr<<1));//发从机地址
- if(IIC_Wait_Ack()==1){ IIC_Stop(); return 0; } IIC_Send_Byte(addr);//发要写入地址
- if(IIC_Wait_Ack()==1){ IIC_Stop(); return 0; }
- IIC_Stop();
- IIC_Start();
- IIC_Send_Byte((device_addr<<1) + 0x01);
- if(IIC_Wait_Ack()==1){ IIC_Stop(); return 0; }
- read_data = IIC_Read_Byte(1);
- IIC_Stop();
- return read_data;
- }
当数据已经可以读写之后,接下来就是看看它的内部是怎么操作的啦!
要想知道怎么操作,就必须明白DRV2667的存储结构是怎么样的,我们才能够操作其中的寄存器来实现对应的功能。因此介绍一下其DRV2667的存储结构大有必要。
2、分页结构(paging system)
由于DRV2667芯片很小,同时要实现更加复杂的波形输出功能,能采用的就是这分页结构了。该芯片的RAM只有2kB大小,且必须要支持8字节,则分页结构就显得很重要了。
我们可以把DRV2667的RAM想象成一个书本,这个书本一共只有9页,第0页为初始页。我们一次只能写入某一页中的某一个寄存器。
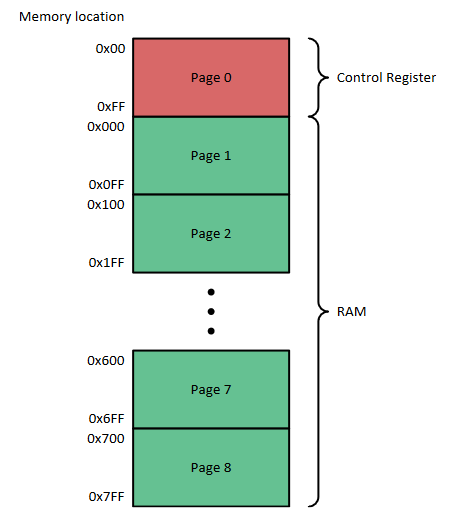
实际上,寄存器地址在RAM中的排布是连续的。“分页”只是一个便于理解的抽象概念。这一点需要注意。 我们将0xFF地址的寄存器称作为“页控制寄存器”。它的默认值是0x00。它其实就起到了一个控制翻页的功能。当它的值为0时,我们便访问第“0”页,当他为1时,我们便访问第“1”页。
而第0页(即当0xFF的数值为0x00时)是控制页。它里面每一个寄存器的数据都代表了一种控制信号,控制着整个波形的输出或停止、模拟或数字、升压模块的电源的启用或关断等。
其他页都是储存波形的页,笔者之后再介绍。
那第0页这么重要,则第0页的每一个寄存器是不是都需要狠狠掌握?并不是!实际上,我们只对那几个十分关键的寄存器关注即可,更甚之,我们只需要知道其中的几个比较关键的位序的含义就可以了!其他都是细枝末节的东西,基本上还是用不到的,需要时查询数据手册就可以啦。
让笔者按照正常写代码时写寄存器的顺序来简单介绍一下相关参数吧!
注意:下面出现的每一个表格中的每个数据的字节的Bit位序按照“76543210”来排序。请勿弄混淆。
3、控制页参数详解
首先,是地址为0x02的寄存器。这个寄存器是一直可写的。它将决定了我的DRV2667是否是处于“信号接受状态”,并决定了我是否可以开始生成波形。它的默认值是0x40,即一直处于“低功耗状态”。
让我们仔细看看它的每一位Bit代表的意义和功能:

该寄存器每个位序代表的含义。 其中,我们最关注的BIT位序是6和0,即STANDBY和GO位。
STANDBY决定了我们的DRV2667能否接收信号,它为0时即可以接收,为1时即处于低功耗状态。
而GO为则决定了我们的是否开始播放波形。当GO位置为1时,波形将按照序列寄存器(即第0页的0x03到0x0A)的数据开始执行波形的输出。为0时则不播放波形数据。这就相当于是一个“开始”的按钮!我们一般在一开始先设置其数值为0x00,即退出“低功耗状态”,并停止波形播放。
另外,位序为1的寄存器也需要注意一下,即该EN_OVERRIDE位。一般来说,当采用数字模式时,该位置0;模拟模式时置1。
然后,是地址为0x01的寄存器。这个寄存器将控制我的输出模式是“模拟模式”还是“数字模式”,并决定我可允许输出波形的电压增益。
让我们仔细看看它的每一位Bit代表的意义和功能:

该寄存器每个位序代表的含义。 其中,我们最关注的BIT位序是2和1-0,即INPUT_MUX和GAIN[1:0]位。
当我们决定采用数字模式时,INPUT_MUX位置0;模拟模式时置1。模拟模式,即我们的输出不需要自己设定幅值、频率、周期和包络上下时间等,而是直接通过放大模拟输入端来获得输出;而数字模式则是在设定好幅值、频率、周期和包络上下时间后直接输出相应的正弦波。
GAIN[1:0]位控制输出的增益或最大值。按25V一个刻度从00到11递增,在数字模式下,输出的最大容许幅度为100V,而模拟增益达到40.7dB。
眼尖且好问的读者就会问,那位序为6-3(CHPID[3:0])的位不是标识了设备到底是DRV2665还是DRV2667吗?这个不去管他会不会有问题?其实无所谓!该位置为0时,设备会自动进行匹配的,无需标识啦!(实验得出的结果)
再然后,就是0x03到0x0A的寄存器了。他们的功能一样,并且很单一。他们的位序不具备含义,整体在一起所表达的数值才有含义。我们可以看看他们的意义是什么:

页序寄存器0x03-0x0A。 实际上,当我们重新将GO位设置为1时,DRV2667将会从0x03开始依次寻找储存波形的页。比如说里面存储的数值为0x01,则DRV2667将会去第1页播放完所有的波形。当第1页播放完毕后,DRV2667将会去0x04继续寻找相应的页的序号。
这将一直持续到往后到0x0A中的某一个寄存器中的值为0x00时停止。续上上述的例子,比如说0x04寄存器的值为0x00,则播放完第1页的波形后,将会停止波形的播放,GO位将自动置为0。
好!介绍完所有的控制页寄存器后,接下来就要去狠狠介绍其他页的的含义了!
4、波形存储页参数详解
第0页称之为控制页,而第1-7页则被称之为波形存储页。他们负责存储数字模式下的波形参数设置。
单个波形存储页由三部分构成。第一部分为表头存储字节。它的大小往往只有一个字节,负责记录所有待记录波形参数的表头的最末尾字节的位置。
第二部分为表头。表头由五个字节构成。第一、二个字节构成播放波形的起始地址,第三、四个字节构成播放波形的停止地址。这五个字节按顺序意思如下:
-
作为起始地址的上位字节,负责记录需要播放的页面地址;
-
作为起始地址的下位字节,负责记录需要播放的指定页面中的指定寄存器地址;
-
作为停止地址的上位字节,负责记录播放的波形页面地址;
-
作为停止地址的下位字节,负责记录播放的波形的指定页面中的指定寄存器地址;
-
波形的循环播放次数。很重要的一个部分:当该部分的参数为0x00时,波形将无限播放下去。

表头块的各个地址组成。 其实很简单就可以理解。每个地址由两个字节构成,上字节再选取一遍需要播放波形的页码,下字节给出需要播放波形的寄存器位置。
第五个字节则是这个波形的播放次数。当数值不为0时,波形将按照设定的数值进行播放;当数值为0时,波形将永远播放下去,除非将GO位重新置为0。
眼尖的读者会注意到,在起始地址的上位字节中的位序7可以设置一个Mode。这个参数有下面的意义:
-
置为1——波形合成模式,一般都采用这个模式。
-
置为0——RAM直接播放模式。
第三部分为波形参数设置。其中包含四个字节。他们的形式如下所示:

波形参数设置字节。 他们的含义如下:
-
幅值(Amplitude):合成正弦波的幅度。0xFF 产生全量程正弦波,0x80 产生半量程正弦波,0x00 不产生任何信号。
-
频率(Frequency):合成正弦波的频率。最小频率为 7.8125 Hz。不允许使用零值。
-
持续周期(Duration):合成正弦波播放的正弦周期数。该参数可以确保波形块始终以零振幅开始和结束,从而避免出现不连续性。
-
包络时间(Envelope):该字节分为两个部分。上位点(位[7:4])设置合成正弦波开始时的上升速率,下位点(位[3:0])设置合成正弦波结束时的下降速率。需要注意一点:斜坡上升时间包含在波形的持续时间参数中,而斜坡下降时间附加在波形的持续时间参数中。
波形的参数和字节的数值(即下方的 𝑣𝑎𝑙𝑢𝑒 )有如下关系:
幅值: 𝑉=𝑣𝑎𝑙𝑢𝑒255𝑉𝑚𝑎𝑥 ;
频率: 𝑓=𝑣𝑎𝑙𝑢𝑒⋅7.8125𝐻𝑧 。
我们只需要按顺序填充这三个部分的所有参数,就能完成所有波形端的设置和部署!
到这里,整个分页结构便终于全部解析完毕!接下来,让笔者的示例代码来狠狠的跑一遍过程,看看最终的输出效果吧!
5、软件代码及效果展示
笔者的示例代码是输出全振幅的有效波形,并且是以差分输出的方式输出结果。按照上面的分析所讲,则我们的核心代码就如下所示:
- #include "DRV2667.h" // DRV2667初始化函数
- void DRV2667_Init(void) { // 初始化I2C IIC_Init(); // 配置DRV2667控制寄存器为200Vpp和数字输入
- I2C_WriteByte(DRV2667_I2C_ADDR,0xFF,0x00);//设置页寄存器;
- I2C_WriteByte(DRV2667_I2C_ADDR,0x02,0x00);//一直打开放大器;
- I2C_WriteByte(DRV2667_I2C_ADDR,0x01,0x01);//设置最高增益;
- I2C_WriteByte(DRV2667_I2C_ADDR,0x03,0x01);//设置为第一页;
- I2C_WriteByte(DRV2667_I2C_ADDR,0x04,0x00);//结束控制寄存器的修改;
- }
- void storeHead(void) { // 配置DRV2667的头
- I2C_WriteByte(DRV2667_I2C_ADDR,0xFF,0x01);//设置内存存储第一页;
- I2C_WriteByte(DRV2667_I2C_ADDR,0x00,0x05);//设置头尺寸;
- I2C_WriteByte(DRV2667_I2C_ADDR,0x01,0x80);//起始头寻页;
- I2C_WriteByte(DRV2667_I2C_ADDR,0x02,0x06);//起始头寻字节;
- I2C_WriteByte(DRV2667_I2C_ADDR,0x03,0x00);//终止头寻页
- I2C_WriteByte(DRV2667_I2C_ADDR,0x04,0x09);//终止头寻字节;
- I2C_WriteByte(DRV2667_I2C_ADDR,0x05,0x00);//重复播放次数;
- } // 设置DRV2667输出波形
- void DRV2667_SetWaveform(void) {
- I2C_WriteByte(DRV2667_I2C_ADDR,0x06,0xFF);//输出幅值;
- I2C_WriteByte(DRV2667_I2C_ADDR,0x07,0x1A);//高频有声音;
- I2C_WriteByte(DRV2667_I2C_ADDR,0x08,0x0A);//循环次数;
- I2C_WriteByte(DRV2667_I2C_ADDR,0x09,0x10);
- } // 启动DRV2667输出波形
- void DRV2667_StartWaveform(void) { // 启动震动
- I2C_WriteByte(DRV2667_I2C_ADDR,0xFF,0x00);
- I2C_WriteByte(DRV2667_I2C_ADDR,0x02,0x01);
- }
而最终输出的结果如下图。

测试的输出波形。示波器表笔倍数为x10。差分输出约为90Vpp。 到此,我们终于跑通了一整个Demo,真不容易!
总结
说实话,对一个硬件新手而言,从一个啥也不懂的菜鸟新手,到经过了一个月的Debug,在金钱和时间的双重折磨下能得到一个这么好看的波形,实在是令笔者感动流涕!跑通了一个硬件绘制到软件撰写的流程,真的能够狠狠地加强笔者的自信心,也让笔者对于硬件的设计有了更加深刻的认识。
另外,细心的读者可能发现了,笔者的波形还存在小部分的失真现象。笔者也正在寻找原因。初步判断是电感的额定电流过小而造成的影响,或者是在FB口升压到VBST时存在了某些问题,导致升压上不去。该测试板还需要继续迭代和测试,以更轻量化和更好的实现效率来达到笔者的需求!
让我们下篇文章再见!
-
-
相关阅读:
设备巡检维修报备小程序开发制作功能介绍
ch0-01
java注解简单介绍
C++编译期循环获取变量类型
评估驾驶员头部姿态变化幅度的统计方法
mysql 索引
postgresql -数据库事务与并发控制
计算机毕业设计(附源码)python悠哈出租车管理系统
排序算法专题实训
C语言入门课程学习笔记3
- 原文地址:https://blog.csdn.net/alxws/article/details/140003114