-
G882磁力仪拖鱼位置是如何计算的?
根据参考文献,磁力仪拖鱼位置计算有两种方法:
1、直线法
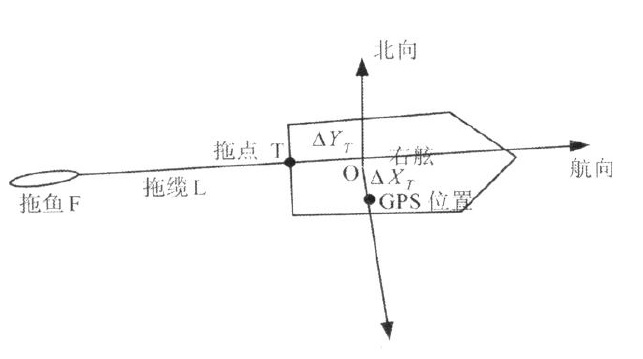
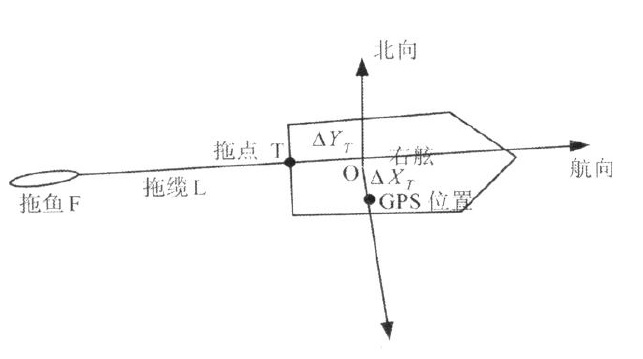
直线计算法是假设不考虑海流、船摆等动态因素的影响,拖鱼与拖点始终和航向相同,即整个拖拽系统与船舶是刚性连接。
2、曲线法
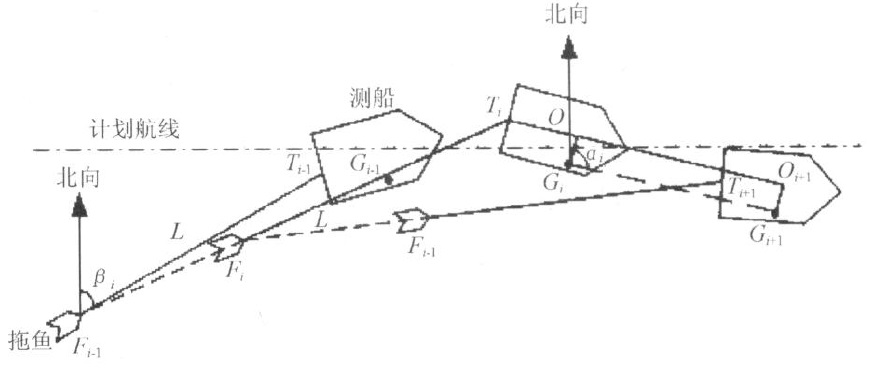
实际海洋磁力测量中,在海风、海流等因素的影响下,测船的航向与航迹向是不一致的,测船的航迹通常呈波动变化,拖鱼的航迹与测船的航迹一般也是不一致的。为了提高测点位置计算精度提出改进的曲线计算法。
曲线计算法的算法如下:
目的:计算T1时刻拖鱼位置F1
已知:T0时刻拖鱼的位置F0,T1时刻GPS的位置G1,拖点T1,T2时刻GPS的位置G2
计算过程:假设T1时刻拖鱼的位置F1在F0至T1的连线上,且F1至T1的距离为拖缆的水平长度。

3、测试
曲线计算法需要拖鱼的初始位置F0,可以通过直线计算法得到;计算过程可以在投影平面坐标系统下实现。
截取一段G882的数据文件,该文件每一行包含同一时刻的GPS和拖鱼位置。
使用直线计算法获取拖鱼的初始位置,使用曲线计算法获取拖鱼的其余位置。
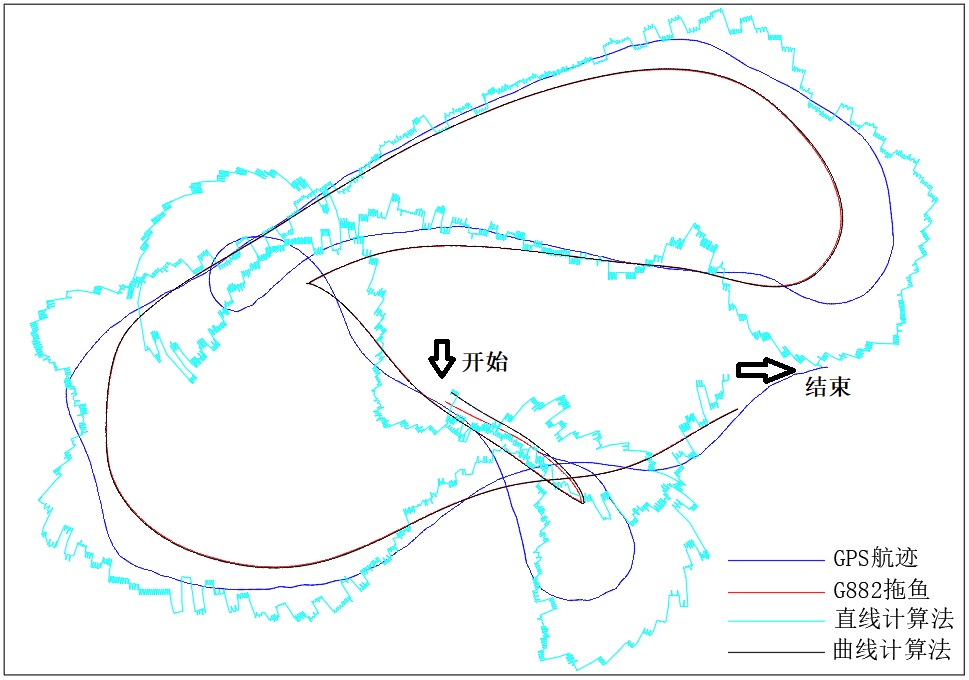
计算结果如下图:

从上图可以看出,1)红黑线基本重合,初始分离的原因是初始值不同,需要一段时间收敛;2)直线计算法的拖鱼航迹跳动比较厉害,而曲线计算法的比较光滑。
参考文献
海洋磁力测量拖鱼位置概算_边刚
基于大地主题解算的海洋磁力测量磁测点位置计算_卞光浪
基于大地主题解算的磁测点位置计算方法_代新建
海洋磁力测量测点拟合方法研究_孙昊
-
相关阅读:
ubuntu18.0安装搜狗输入法无法显示中文
k8s认证
Pycharm中新建一个文件夹下__init__.py文件有什么用
总结类体中的内容及其执行的先后顺序(学习中途总结)
基于狮群算法优化LSTM的上证指数预测资源
Java Socket服务端和客户端通讯实例
驱动day4作业
SwiftUI 教程之 用iPad 创建真正的iOS 应用程序介绍篇
数据库插入数据
kafka详解一
- 原文地址:https://blog.csdn.net/u011115875/article/details/140050795