-
VScode创建ROS项目 ROS集成开发环境
本文章介绍了如何在Ubuntu18.04系统下搭建VScode 的ROS项目
搭建项目分为一下几个步骤:1.创建ROS工作空间
创建一个demo的ROS工作空间,并进行编译,此时home路径下会生成一个demo的工作空间,demo文件下的结构如图所示
mkdir -p demo/src # (必须得有 src) cd demo catkin_make
2.启动VScode
进入到demo路径下,启动VScode
cd demo code .3.VScode编译ROS
使用快捷键 ctrl + shift + B 调用编译,选择:catkin_make:build点击设置进行编译配置,会生成一个.vscode/tasks.json 文件,修改.vscode/tasks.json 文件的内容,将tasks.json的内容换为如下内容

tasks.json文件内容{ // 有关 tasks.json 格式的文档,请参见 // https://go.microsoft.com/fwlink/?LinkId=733558 "version": "2.0.0", "tasks": [ { "label": "catkin_make:debug", //代表提示的描述性信息 "type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行 "command": "catkin_make",//这个是我们需要运行的命令 "args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2” "group": {"kind":"build","isDefault":true}, "presentation": { "reveal": "always"//可选always或者silence,代表是否输出信息 }, "problemMatcher": "$msCompile" } ] }4.创建ROS功能包
- 选定 src 右击 —> create catkin package

- 创建一个hello_world功能包

- 使用roscpp rospy std_msgs作为依赖库

hello_world功能包下的结构如图所示,功能包创建成功

C++语言开发
-
在hello_world功能包的src文件夹下新建一个cpp文件
#include "ros/ros.h" int main(int argc, char *argv[]) { setlocale(LC_ALL,""); // 设置可以显示中文 //执行节点初始化 ros::init(argc,argv,"HelloWorld"); //输出日志 ROS_INFO("Hello World!!!哈哈哈哈哈哈哈哈哈哈"); return 0; }
-
配置CMakeLists.txt
修改hello_world功能包下的CMakeLists.txt,找到add_executable和target_link_libraries,修改成如图所示,hello_world定义的是节点,可以自己随机命名,但add_executable和target_link_libraries的节点要保持一致

-
编译执行
-
按快捷键ctrl + shift + B 编译,如何所示,说明项目没有问题

-
开启一个Terminal,运行roscore命令

-
再开启一个新的Terminal,执行以下命令,运行程序
cd demo source ./devel/setup.bash rosrun hello_world hello_world # 第一个hello_world表示的是hello_world功能包,第二个hello_world表示的hello_world节点
-
Python语言开发
-
在 hello_world 功能包新建一个 scripts 文件,在 scripts 下新建一个 hello_world_p.py 文件
#! /usr/bin/env python3 import rospy if __name__ == "__main__": rospy.init_node("hello_p") rospy.loginfo("hello world! this is python")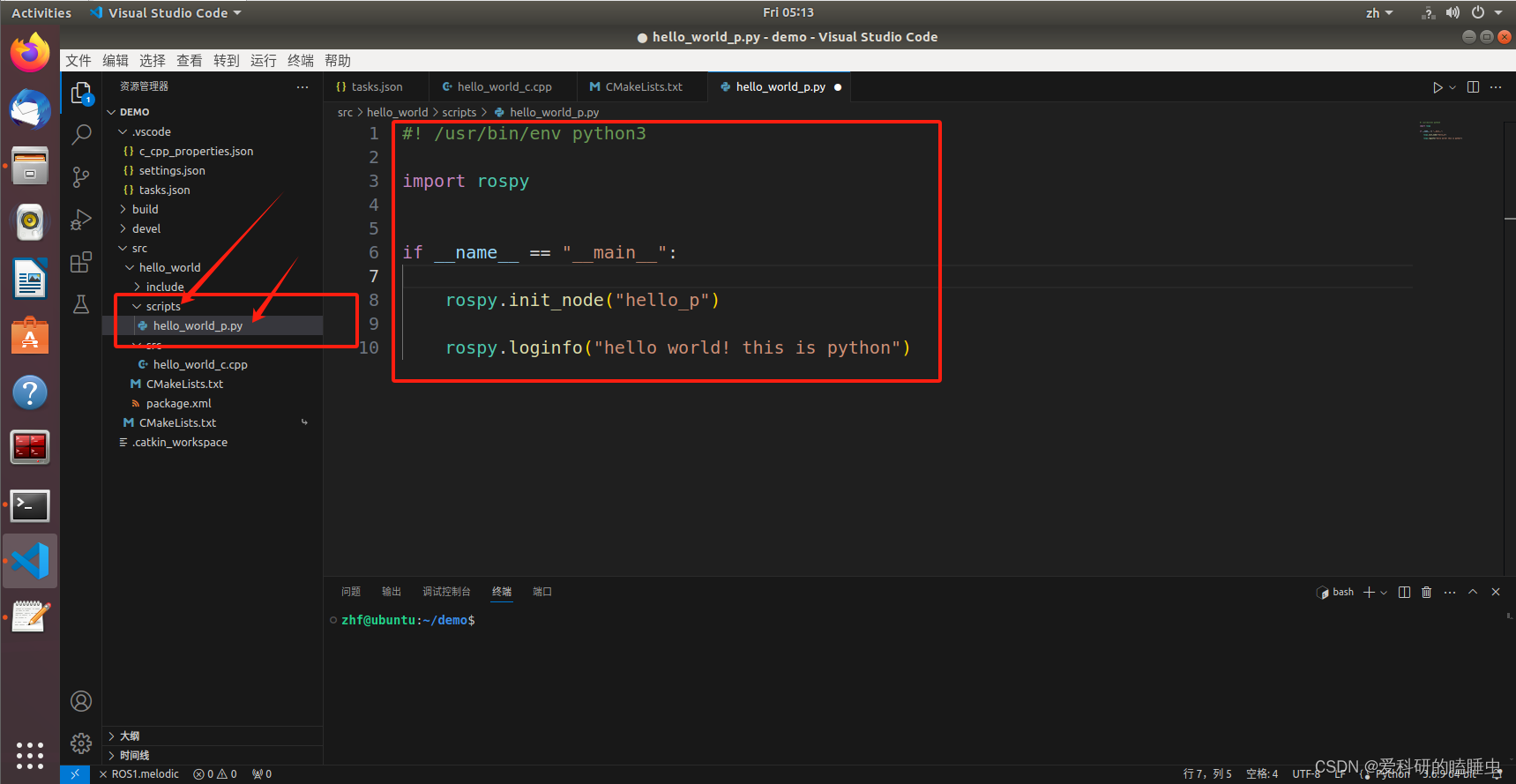
-
给 python 文件添加可执行权限
进入到scripts文件夹下,执行 chmod +x hello_world_p.py 给python文件添加可执行的文件cd src/hello_world/scripts chmod +x hello_world_p.py -
配置 CMakeLists.txt
修改hello_world功能包下的CMakeLists.txt,找到catkin_install_python,修改成如图所示:

-
编译执行
-
按快捷键ctrl + shift + B 编译,如何所示,说明项目没有问题

-
开启一个Terminal,运行roscore命令

-
再开启一个新的Terminal,执行以下命令,运行程序
cd deno source ./devel/setup.bash rosrun hello_world hello_world_p.py
-
- 选定 src 右击 —> create catkin package
-
相关阅读:
Node.js之TCP(net)
分布式任务xxl-job调度中心安装说明
【iOS-知乎日报第四周总结】
数据挖掘学习——KNN(k-近邻)
吹爆,阿里最新开源的这份Redis全栈小册,涵盖了Redis的所有操作
HDFS学习笔记(三):HDFS 分布式文件系统原理
【FPGA教程案例65】硬件开发板调试5——基于RS232的串口通信,由FPGA发射数据到PC
花了20W才怠结出的短视频运营真话
【LeetCode】191、461、190、118、268
docker基于debian11基础环境安装libreoffice
- 原文地址:https://blog.csdn.net/m0_49289284/article/details/139819167