-
【深度学习模型移植】用torch普通算子组合替代torch.einsum方法
首先不得不佩服大模型的强大之处,在算法移植过程中遇到einsum算子在ONNX中不支持,因此需要使用普通算子替代。参考TensorRT - 使用torch普通算子组合替代torch.einsum爱因斯坦求和约定算子的一般性方法。可以写出简单的替换方法,但是该方法会导致训练时还是推理都很慢,并且会消耗大量显存,造成显存溢出的问题。。因此采用提问文心一言,没想到居然真的回答正确了。当然替换需要验证,不是全对的。
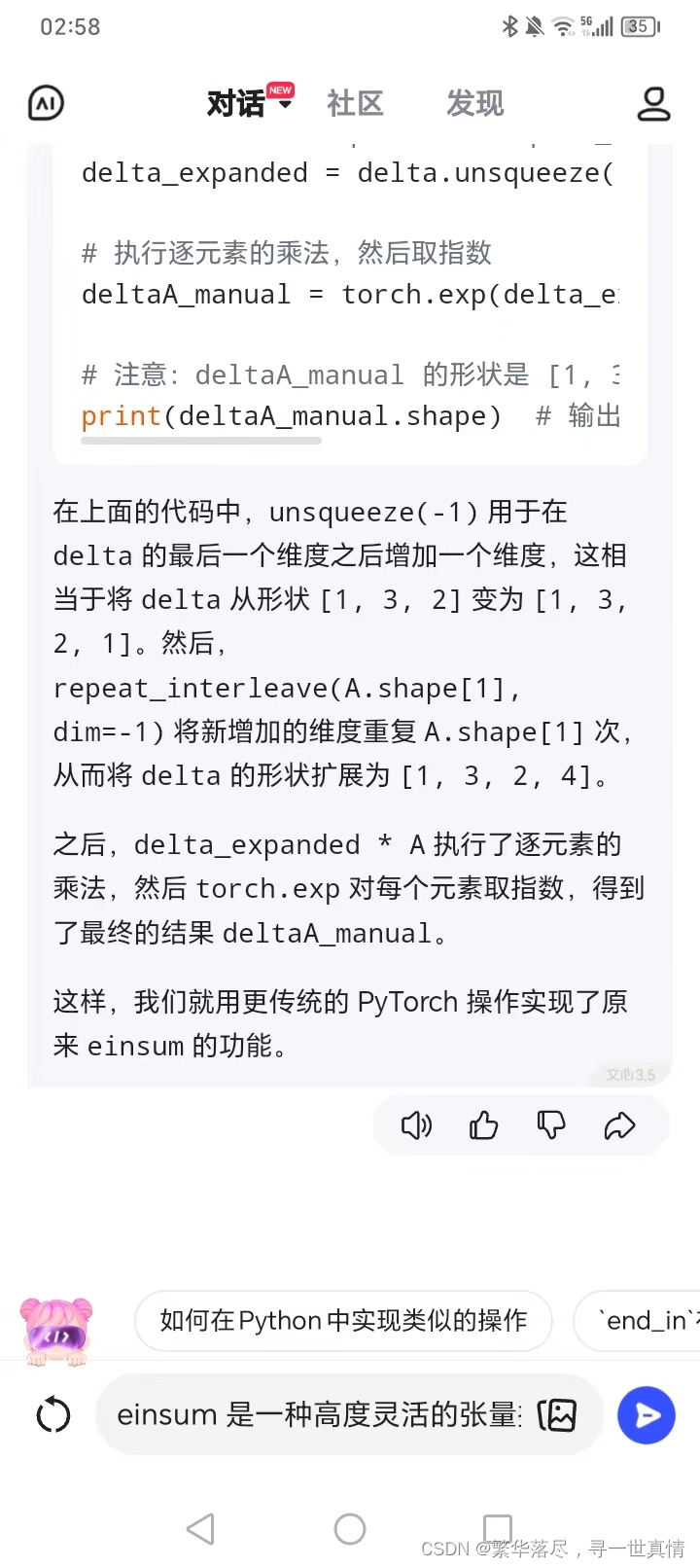
1.einsum(delta, A, ‘b l d_in, d_in n -> b l d_in n’) 的替换,以下两个方法均可以deltaA = torch.exp(einsum(delta, A, 'b l d_in, d_in n -> b l d_in n')) deltaA = torch.exp(delta.unsqueeze(dim=3)*A.unsqueeze(dim=0).unsqueeze(dim=0)) deltaA = torch.exp(delta.unsqueeze(-1).repeat_interleave(A.shape[1], dim=-1) * A)- 1
- 2
- 3
2.einsum(x, C[:, i, :], ‘b d_in n, b n -> b d_in’),以下两个方法均可以
y = einsum(x, C[:, i, :], 'b d_in n, b n -> b d_in') y = (x*C[:, i, :].unsqueeze(dim=1)).sum(dim=2) y = torch.matmul(C[:, i, :], x.transpose(-1, -2)).squeeze(1)- 1
- 2
- 3
- 4
3.einsum(delta, B, u, ‘b l d_in, b l n, b l d_in -> b l d_in n’),以下两个方法均可以
deltaB_u = einsum(delta, B, u, 'b l d_in, b l n, b l d_in -> b l d_in n') deltaB_u1 = delta.unsqueeze(dim=3)*B.unsqueeze(dim=2)*u.unsqueeze(dim=3)- 1
- 2
下述方法是提问文心一言的办法,注意需要将答案的结果和einsum的结果进行对比,采用np.testing.assert_allclose(deltaB_u.numpy(),deltaB_u1.numpy(),rtol=1e-05,atol=1e-05)和print(deltaA.equal(deltaA_manual))均可以。
import torch import numpy as np from einops import rearrange, repeat, einsum # 给定的张量 delta = torch.ones([1, 3, 2]) A = torch.ones([2, 4]) deltaA = torch.exp(einsum(delta, A, 'b l d_in, d_in n -> b l d_in n')) deltaA1 = torch.exp(delta.unsqueeze(dim=3)*A.unsqueeze(dim=0).unsqueeze(dim=0)) deltaA_manual = torch.exp(delta.unsqueeze(-1).repeat_interleave(A.shape[1], dim=-1) * A) np.testing.assert_allclose(deltaA.numpy(),deltaA1.numpy(),rtol=1e-05,atol=1e-05) # 扩展 delta 的维度,以便它可以与 A 进行广播(broadcast) # 这里我们使用 unsqueeze 和 repeat_interleave 来扩展维度 delta_expanded = delta.unsqueeze(-1).repeat_interleave(A.shape[1], dim=-1) # 执行逐元素的乘法,然后取指数 deltaA_manual = torch.exp(delta_expanded * A) # 注意:deltaA_manual 的形状是 [1, 3, 2, 4],这与 einsum 的输出形状一致 print(deltaA.equal(deltaA_manual)) print(deltaA1.equal(deltaA_manual))- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20

-
相关阅读:
python 基于django医院预约挂号管理系统
局部线性嵌入LLE算法--学习笔记
PacBio三代宏基因组测序大幅提升海洋水体宏基因组研究效果
webpack:关于处理html文件的插件html-webpack-plugin、add-asset-html-webpack-plugin
MATLAB使用OMP实现图像的压缩感知实例
vscode的git 工具使用
【Android】画面卡顿优化列表流畅度三之RecyclerView刷新机制notifyItemRangeInserted
多种DNS的详细搭建方案和实现步骤,自建DNS防止DNS污染、DNS劫持,包括基于bind的named、dnsmasq、c-l-a-s-hdns等。
java毕业生设计药品管理系统演示录像2021计算机源码+系统+mysql+调试部署+lw
Python中import出现路径错误总结
- 原文地址:https://blog.csdn.net/weixin_43509698/article/details/136753505
