-
基于YOLOv8深度学习的无人机视角地面物体检测系统【python源码+Pyqt5界面+数据集+训练代码】深度学习实战、目标检测
《博主简介》
小伙伴们好,我是阿旭。专注于人工智能、AIGC、python、计算机视觉相关分享研究。
✌更多学习资源,可关注公-仲-hao:【阿旭算法与机器学习】,共同学习交流~
👍感谢小伙伴们点赞、关注!《------往期经典推荐------》
二、机器学习实战专栏【链接】,已更新31期,欢迎关注,持续更新中~~
三、深度学习【Pytorch】专栏【链接】
四、【Stable Diffusion绘画系列】专栏【链接】
五、YOLOv8改进专栏【链接】,持续更新中~~《------正文------》
基本功能演示

摘要:
无人机视角物体检测系统是一项先进的目标检测技术,它具有实时、高效和自动识别地面物体的能力。当无人机搭载此系统时,可以在空中执行复杂的监视和分析任务,捕获广角视野下的动态情况。本文基于YOLOv8深度学习框架,通过7019张图片,训练了一个进行无人机视角下物体的目标检测模型,可进行10种类型的物体检测。并基于此模型开发了一款带UI界面的无人机视角物体检测系统,可用于实时检测无人机拍摄的地面物体,也更方便进行功能的展示。该系统是基于python与PyQT5开发的,支持图片、视频以及摄像头进行目标检测,并保存检测结果。本文提供了完整的Python代码和使用教程,给感兴趣的小伙伴参考学习,完整的代码资源文件获取方式见文末。
前言
基于YOLOv8的
无人机视角物体检测系统是一项先进的技术,它具有实时、高效和自动识别地面物体的能力。当无人机搭载此系统时,可以在空中执行复杂的监视和分析任务,捕获广角视野下的动态情况。这对于增强多种领域的安全监控、交通监管、人群管理和灾害响应等方面均有重要意义。系统能够对运动或静止的目标进行识别,实现从高空进行准确观察的需求,相对于传统的地面监视,无人机视角提供了更大范围的监控能力和更灵活的视角。无人机视角物体检测系统的
应用场景包括:
交通监控:监测和分析道路上的交通流量,包含汽车、公交车、卡车等不同类型的车辆。
搜索与救援:在遇难者搜寻过程中,快速识别受困人员或者事故现场的行人,提高搜救效率。
安全巡逻:使用无人机监控私有或公共区域,检测非法行为,如非法占用公共道路的摊贩。
灾害评估:自然灾害发生后,评估受损交通工具、道路堵塞情况和人员分布。
人群监管:在大型公共活动或聚集地点,对人群流动进行监测,保障公共安全。
城市规划与管理:分析城市中车辆和行人的流量和分布,为城市规划提供数据支持。
农村地区交通统计:在缺乏传统监控基础设施的偏远地区,无人机可以监控和统计交通情况。
执法记录:记录交通违规行为,作为事故分析或执法的证据。总结来说,
基于YOLOv8的无人机视角物体检测系统为现代监控带来了革命性的改进,可实现高效、精确且广泛的应用。该系统不仅为实时监测提供支持,而且有助于紧急情况下的快速响应,最终为我们构建一个更加安全、更可管理的环境。随着无人机技术和人工智能的进步,我们可以期待这些系统在未来发挥更大的作用,实现更广泛的应用。博主通过搜集实际场景中的
无人机视角相关数据图片,根据YOLOv8的目标检测技术,基于python与Pyqt5开发了一款界面简洁的无人机视角物体检测系统,可支持图片、视频以及摄像头检测,同时可以将图片或者视频检测结果进行保存。软件初始界面如下图所示:

检测结果界面如下:

一、软件核心功能介绍及效果演示
软件主要功能
1. 可用于
实时无人机视角下的物体检测,可检测10个类别,分别是:['行人','人','汽车','面包车','公交车','卡车','摩托车','自行车','带蓬三轮车','三路车'];
2. 支持图片、视频及摄像头进行检测,同时支持图片的批量检测;
3. 界面可实时显示目标位置、目标总数、置信度、用时等信息;
4. 支持图片或者视频的检测结果保存;界面参数设置说明

置信度阈值:也就是目标检测时的conf参数,只有检测出的目标置信度大于该值,结果才会显示;
交并比阈值:也就是目标检测时的iou参数,只有目标检测框的交并比大于该值,结果才会显示;IoU:全称为Intersection over
Union,表示交并比。在目标检测中,它用于衡量模型生成的候选框与原标记框之间的重叠程度。IoU值越大,表示两个框之间的相似性越高。通常,当IoU值大于0.5时,认为可以检测到目标物体。这个指标常用于评估模型在特定数据集上的检测准确度。(1)图片检测演示
点击
打开图片按钮,选择需要检测的图片,或者点击打开文件夹按钮,选择需要批量检测图片所在的文件夹,操作演示如下:
点击目标下拉框后,可以选定指定目标的结果信息进行显示。
点击保存按钮,会对检测结果进行保存,存储路径为:save_data目录下。
注:1.右侧目标位置默认显示置信度最大一个目标位置,可用下拉框进行目标切换。所有检测结果均在左下方表格中显示。
单个图片检测操作如下:
批量图片检测操作如下:

(2)视频检测演示
点击
视频按钮,打开选择需要检测的视频,就会自动显示检测结果,再次点击可以关闭视频。
点击保存按钮,会对视频检测结果进行保存,存储路径为:save_data目录下。

(3)摄像头检测演示
点击
打开摄像头按钮,可以打开摄像头,可以实时进行检测,再次点击,可关闭摄像头。

(4)保存图片与视频检测结果
点击
保存按钮后,会将当前选择的图片【含批量图片】或者视频的检测结果进行保存。检测的图片与视频结果会存储在save_data目录下。
视频检测保存演示如下:

保存的检测结果文件如下:

二、模型的训练、评估与推理
1.YOLOv8的基本原理
YOLOv8是一种前沿的目标检测技术,它基于先前YOLO版本在目标检测任务上的成功,进一步提升了性能和灵活性,
在精度和速度方面都具有尖端性能。在之前YOLO 版本的基础上,YOLOv8 引入了新的功能和优化,使其成为广泛应用中各种物体检测任务的理想选择。主要的创新点包括一个新的骨干网络、一个新的 Ancher-Free 检测头和一个新的损失函数,可以在从 CPU 到 GPU 的各种硬件平台上运行。
YOLO各版本性能对比:

YOLOv8网络结构如下:

2. 数据集准备与训练
本文使用的数据集为
无人机视角拍摄的物体相关图片,并使用Labelimg标注工具对每张图片中的目标边框(Bounding Box)及类别进行标注,共10个类别,分别是:['行人','人','汽车','面包车','公交车','卡车','摩托车','自行车','带蓬三轮车','三路车']。一共包含7019张图片,其中训练集包含6471张图片,验证集包含548张图片。
部分图像及标注如下图所示:


图片数据的存放格式如下,在项目目录中新建datasets目录,同时将检测的图片分为训练集与验证集放入Data目录下。

同时我们需要新建一个
data.yaml文件,用于存储训练数据的路径及模型需要进行检测的类别。YOLOv8在进行模型训练时,会读取该文件的信息,用于进行模型的训练与验证。data.yaml的具体内容如下:train: D:\2MyCVProgram\2DetectProgram\DroneViewDetection_v8\datasets\Data\train val: D:\2MyCVProgram\2DetectProgram\DroneViewDetection_v8\datasets\Data\val nc: 10 names: ['pedestrian', 'person', 'car', 'van', 'bus', 'truck', 'motor', 'bicycle', 'awning-tricycle', 'tricycle']- 1
- 2
- 3
- 4
- 5
注:train与val后面表示需要训练图片的路径,建议直接写自己文件的绝对路径。
数据准备完成后,通过调用train.py文件进行模型训练,epochs参数用于调整训练的轮数,batch参数用于调整训练的批次大小【根据内存大小调整,最小为1】,代码如下:#coding:utf-8 from ultralytics import YOLO # 模型配置文件 model_yaml_path = "ultralytics/cfg/models/v8/yolov8.yaml" #数据集配置文件 data_yaml_path = 'datasets/Data/data.yaml' #预训练模型 pre_model_name = 'yolov8n.pt' if __name__ == '__main__': #加载预训练模型 model = YOLO(model_yaml_path).load(pre_model_name) #训练模型 results = model.train(data=data_yaml_path, epochs=150, batch=4, name='train_v8')- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
3. 训练结果评估
在深度学习中,我们通常用损失函数下降的曲线来观察模型训练的情况。YOLOv8在训练时主要包含三个方面的损失:定位损失(box_loss)、分类损失(cls_loss)和动态特征损失(dfl_loss),在训练结束后,可以在
runs/目录下找到训练过程及结果文件,如下所示:

各损失函数作用说明:
定位损失box_loss:预测框与标定框之间的误差(GIoU),越小定位得越准;
分类损失cls_loss:计算锚框与对应的标定分类是否正确,越小分类得越准;
动态特征损失(dfl_loss):DFLLoss是一种用于回归预测框与目标框之间距离的损失函数。在计算损失时,目标框需要缩放到特征图尺度,即除以相应的stride,并与预测的边界框计算Ciou Loss,同时与预测的anchors中心点到各边的距离计算回归DFLLoss。这个过程是YOLOv8训练流程中的一部分,通过计算DFLLoss可以更准确地调整预测框的位置,提高目标检测的准确性。
本文训练结果如下:

我们通常用
PR曲线来体现精确率和召回率的关系,本文训练结果的PR曲线如下。mAP表示Precision和Recall作为两轴作图后围成的面积,m表示平均,@后面的数表示判定iou为正负样本的阈值。mAP@.5:表示阈值大于0.5的平均mAP,可以看到本文模型目标检测的mAP@0.5值为0.344,结果有进一步提升空间。

4. 检测结果识别
模型训练完成后,我们可以得到一个最佳的训练结果模型
best.pt文件,在runs/train/weights目录下。我们可以使用该文件进行后续的推理检测。
图片检测代码如下:#coding:utf-8 from ultralytics import YOLO import cv2 # 所需加载的模型目录 path = 'models/best_v8.pt' # 需要检测的图片地址 img_path = "TestFiles/0000140_02277_d_0000005.jpg" # 加载预训练模型 # conf 0.25 object confidence threshold for detection # iou 0.7 intersection over union (IoU) threshold for NMS model = YOLO(path, task='detect') # model = YOLO(path, task='detect',conf=0.5) # 检测图片 results = model(img_path) print(results) res = results[0].plot() res = cv2.resize(res,dsize=None,fx=0.5,fy=0.5,interpolation=cv2.INTER_LINEAR) cv2.imshow("YOLOv8 Detection", res) cv2.waitKey(0)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
执行上述代码后,会将执行的结果直接标注在图片上,结果如下:

以上便是关于此款
无人机视角物体检测系统的原理与代码介绍。基于此模型,博主用python与Pyqt5开发了一个带界面的软件系统,即文中第二部分的演示内容,能够很好的支持图片、视频及摄像头进行检测,同时支持检测结果的保存。关于该系统涉及到的完整源码、UI界面代码、数据集、训练代码、测试图片视频等相关文件,均已打包上传,感兴趣的小伙伴可以通过下载链接自行获取。
【获取方式】
本文涉及到的完整全部程序文件:包括python源码、数据集、训练好的结果文件、训练代码、UI源码、测试图片视频等(见下图),获取方式见文末:
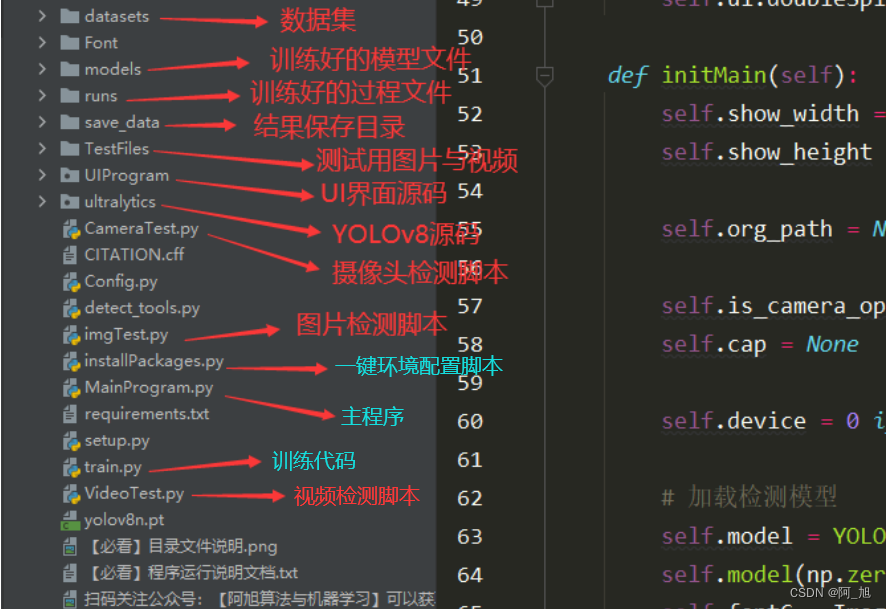
注意:该代码基于Python3.9开发,运行界面的主程序为
MainProgram.py,其他测试脚本说明见上图。为确保程序顺利运行,请按照程序运行说明文档txt配置软件运行所需环境。
结束语
以上便是博主开发的
基于YOLOv8深度学习的无人机视角物体检测系统的全部内容,由于博主能力有限,难免有疏漏之处,希望小伙伴能批评指正。
关于本篇文章大家有任何建议或意见,欢迎在评论区留言交流!觉得不错的小伙伴,感谢点赞、关注加收藏哦!
-
相关阅读:
服务器测试之linux下RAID/HBA管理命令汇总
第三章 内存管理 三、覆盖与交换
1090 合并果子
node.js - 上传文件至阿里云oss
Hadoop集群WordCount详解
还在用Feign?推荐一款微服务间调用神器,跟SpringCloud绝配!
Python异步编程小解一
Java 接口的学习笔记
【Android】Kotlin学习小结
003:高精地图数据采集
- 原文地址:https://blog.csdn.net/qq_42589613/article/details/136654600
