-
FPGA 按键控制串口发送
按键消抖
消抖时间一般为10ms,我使用的板子是ACX720,晶振为50MHZ,20ns为一周期。

状态机
模块设计
设计文件`timescale 1ns / 1ps // // Company: // Engineer: // // Create Date: 2023/01/11 12:18:36 // Design Name: // Module Name: key_filter // Project Name: // Target Devices: // Tool Versions: // Description: // // Dependencies: // // Revision: // Revision 0.01 - File Created // Additional Comments: // // module key_filter( Clk, Rst_n, Key_in, Key_flag, //按键按下标志位 Key_State //高电平,按键按下 ); input Clk; input Rst_n; input Key_in; output reg Key_flag; output reg Key_State; parameter Filter_Time=500_000; //10ms localparam S1=4'b0001,//按键松开 S2=4'b0010,//消抖计数 S3=4'b0100,//按键松开 S4=4'b1000;//消抖计数 //捕捉按键上升沿和下降沿 reg [2:0] Pos_Neg_r; wire pos_edge; wire neg_edge; always@(posedge Clk or negedge Rst_n)begin if(!Rst_n) Pos_Neg_r<=0; else begin Pos_Neg_r={Pos_Neg_r[1:0],Key_in}; end end assign pos_edge=Pos_Neg_r[2:1]==2'b01;//上升沿 //按键松开 assign neg_edge=Pos_Neg_r[2:1]==2'b10;//下降沿 //按键按下 //消抖延迟计数器 reg [18:0] counter_cnt; reg En_counter_cnt;//按键消抖计数的条件 wire end_counter_cnt; always@(posedge Clk or negedge Rst_n)begin if(!Rst_n) counter_cnt<=19'd0; else if(En_counter_cnt)begin if(end_counter_cnt) counter_cnt<=19'd0; else counter_cnt<=counter_cnt+1'd1; end else counter_cnt<=19'd0; end assign end_counter_cnt=counter_cnt>=(Filter_Time-1); reg [3:0] cur_state; //定义现态寄存器 reg [3:0] next_state; //定义次态寄存器 /* ----------------------------------------------------------------------- 状态机第一段:同步时序描述状态转移 ----------------------------------------------------------------------- */ always@(posedge Clk or negedge Rst_n)begin if(!Rst_n) cur_state <= S1; //复位初始状态 else cur_state <= next_state; //次态转移到现态 end /* ----------------------------------------------------------------------- 状态机第二段:组合逻辑判断状态转移条件,描述状态转移规律以及输出 ----------------------------------------------------------------------- */ always@(*)begin case(cur_state) S1:begin //按键松开状态 if(neg_edge) //按键按下--检测到下降沿 next_state=S2; else next_state=cur_state; end S2:begin if(pos_edge) next_state=S1; else if(end_counter_cnt) next_state=S3; else next_state=cur_state; end S3:begin //按键按下状态 if(pos_edge) //按键松开--检测到上升沿 next_state=S4; else next_state=cur_state; end S4:begin if(neg_edge) next_state=S3; else if(end_counter_cnt) next_state=S1; else next_state=cur_state; end default:next_state=cur_state; endcase end /* ----------------------------------------------------------------------- 状态机第三段:时序逻辑描述输出 ----------------------------------------------------------------------- */ //消抖计数使能 always@(posedge Clk or negedge Rst_n)begin if(!Rst_n) En_counter_cnt <= 1'b0; //复位、初始状态 else case(cur_state) //根据当前状态进行输出 S1: En_counter_cnt <= 1'b0; //不计数 S2: En_counter_cnt <= 1'b1; //计数 S3: En_counter_cnt <= 1'b0; //不计数 S4: En_counter_cnt <= 1'b1; //计数 default:En_counter_cnt <= 1'b0; //默认不计数 endcase end //按键按下标志位 always@(posedge Clk or negedge Rst_n)begin if(!Rst_n) Key_flag <= 1'b0; //复位、初始状态 //Key_State存在一拍 else if(cur_state==S2 && end_counter_cnt) Key_flag<=1'd1; else Key_flag<=1'd0; end //输出按键状态 always@(posedge Clk or negedge Rst_n)begin if(!Rst_n) Key_State <= 1'b0; //复位、初始状态 else if(cur_state==S3) Key_State<=1'd1; else if(cur_state==S4 && end_counter_cnt) Key_State<=1'd0; else Key_State<=Key_State; end endmodule- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
仿真验证`timescale 1ns / 1ps // // Company: // Engineer: // // Create Date: 2023/01/06 16:24:27 // Design Name: // Module Name: key_filter_tb // Project Name: // Target Devices: // Tool Versions: // Description: // // Dependencies: // // Revision: // Revision 0.01 - File Created // Additional Comments: // // module key_filter_tb(); reg Clk; reg Rst_n; reg Key_in; wire Key_flag; wire Key_State; key_filter #( .Filter_Time(5000)//100us ) key_filter( Clk, Rst_n, Key_in, Key_flag, //按键按下标志位 Key_State //高电平,按键按下 ); initial Clk=1; always #10 Clk=~Clk; initial begin Rst_n=0; Key_in=1; #201; Rst_n=1; Key_in=1;#20000; Key_in=0;#20000; Key_in=1;#10000; Key_in=0;#20000; Key_in=1;#20000; Key_in=0;#600000; Key_in=1;#20000; Key_in=0;#20000; Key_in=1;#10000; Key_in=0;#20000; Key_in=1;#20000; Key_in=0;#20000; Key_in=1;#10000; Key_in=0;#20000; Key_in=1;#20000; Key_in=0;#20000; Key_in=1;#10000; Key_in=1;#600000; $stop; end endmodule- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74

串口发送
**注意:**电平信号的传输线中有一个参考电平线(一般是GND),然后信号线上的信号值是由信号线电平和参考电平线的电压差决定。所以我们一定要养成模块之间共地的好习惯。
串口帧
模块设计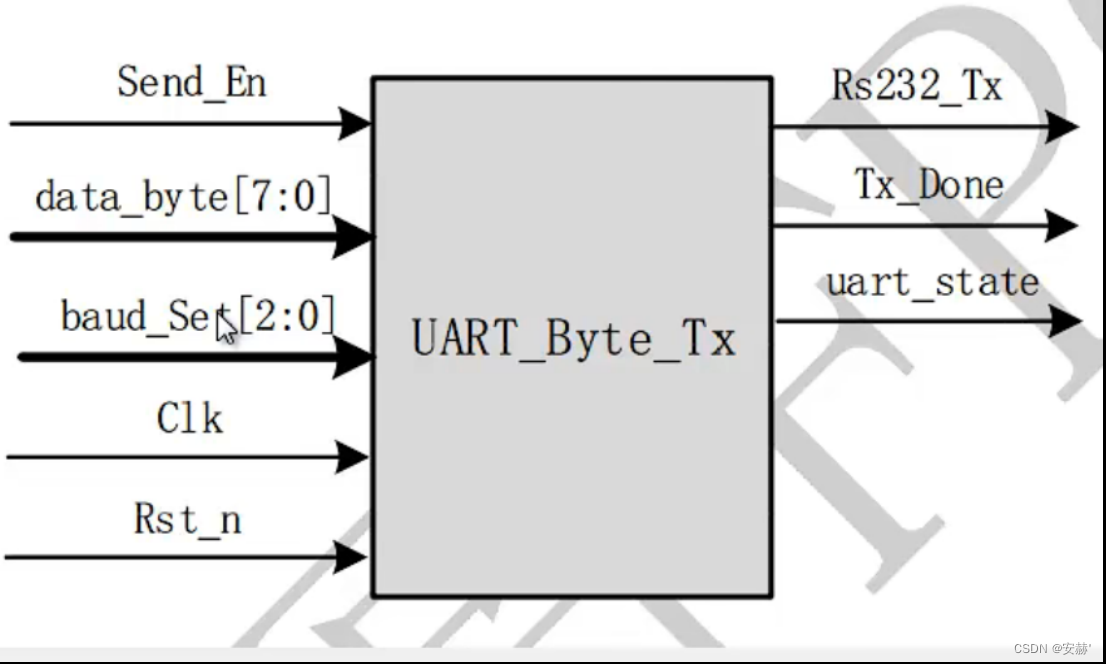
`timescale 1ns / 1ps // // Company: // Engineer: // // Create Date: 2023/01/06 11:30:58 // Design Name: // Module Name: UART_Byte_Tx // Project Name: // Target Devices: // Tool Versions: // Description: // // Dependencies: // // Revision: // Revision 0.01 - File Created // Additional Comments: // // module UART_Byte_Tx #( parameter BaudRate = 115200,//波特率 parameter ClockRate = 50_000_000//系统时钟 ) ( Clk, Rst_n, Send_En, data_byte, Tx_Data, Tx_Done, uart_state ); input Clk; input Rst_n; input Send_En; input [7:0] data_byte; output reg Tx_Data; output reg Tx_Done; output reg uart_state; //设置使能 reg tx_en; always@(posedge Clk or negedge Rst_n)begin if(!Rst_n) tx_en<=0; else if(Send_En) tx_en<=1'd1; else if(Tx_Done) tx_en<=1'd0; else tx_en<=tx_en; end //设置波特率 localparam Buad_Num = ClockRate/BaudRate; //设置计数器 reg [12:0] buad_cnt; wire add_buad_cnt; wire end_buad_cnt; always@(posedge Clk or negedge Rst_n)begin if(!Rst_n) buad_cnt<=0; else if(add_buad_cnt)begin if(end_buad_cnt) buad_cnt<=0; else buad_cnt<=buad_cnt+1'b1; end else buad_cnt<=0; end assign add_buad_cnt=tx_en; assign end_buad_cnt=buad_cnt>=(Buad_Num-1'd1); //设置发送bit计数 reg [3:0] bit_cnt; wire add_bit_cnt; wire end_bit_cnt; always@(posedge Clk or negedge Rst_n)begin if(!Rst_n) bit_cnt<=0; else if(add_bit_cnt) bit_cnt<=bit_cnt+1'd1; else if(end_bit_cnt) bit_cnt<=0; else bit_cnt<=bit_cnt; end assign add_bit_cnt=buad_cnt==1; assign end_bit_cnt=(bit_cnt==4'd10 && add_bit_cnt) || !tx_en; //发送数据 always@(posedge Clk or negedge Rst_n)begin if(!Rst_n) Tx_Data<=1; else begin case(bit_cnt) 4'd1:Tx_Data<=0; 4'd2:Tx_Data<=data_byte[0]; 4'd3:Tx_Data<=data_byte[1]; 4'd4:Tx_Data<=data_byte[2]; 4'd5:Tx_Data<=data_byte[3]; 4'd6:Tx_Data<=data_byte[4]; 4'd7:Tx_Data<=data_byte[5]; 4'd8:Tx_Data<=data_byte[6]; 4'd9:Tx_Data<=data_byte[7]; 4'd10:Tx_Data<=1; default:Tx_Data<=1; endcase end end //发送结束 always@(posedge Clk or negedge Rst_n)begin if(!Rst_n) Tx_Done<=0; else if(bit_cnt==4'd10 && add_bit_cnt) Tx_Done<=1; else Tx_Done<=0; end //发送状态(有效数据) wire En_uart_state; wire Nen_uart_state; always@(posedge Clk or negedge Rst_n)begin if(!Rst_n) uart_state<=0; else if(En_uart_state) uart_state<=1; else if(Nen_uart_state) uart_state<=0; end assign En_uart_state=bit_cnt==4'd1 && add_bit_cnt; assign Nen_uart_state=bit_cnt==4'd9 && add_bit_cnt; endmodule- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
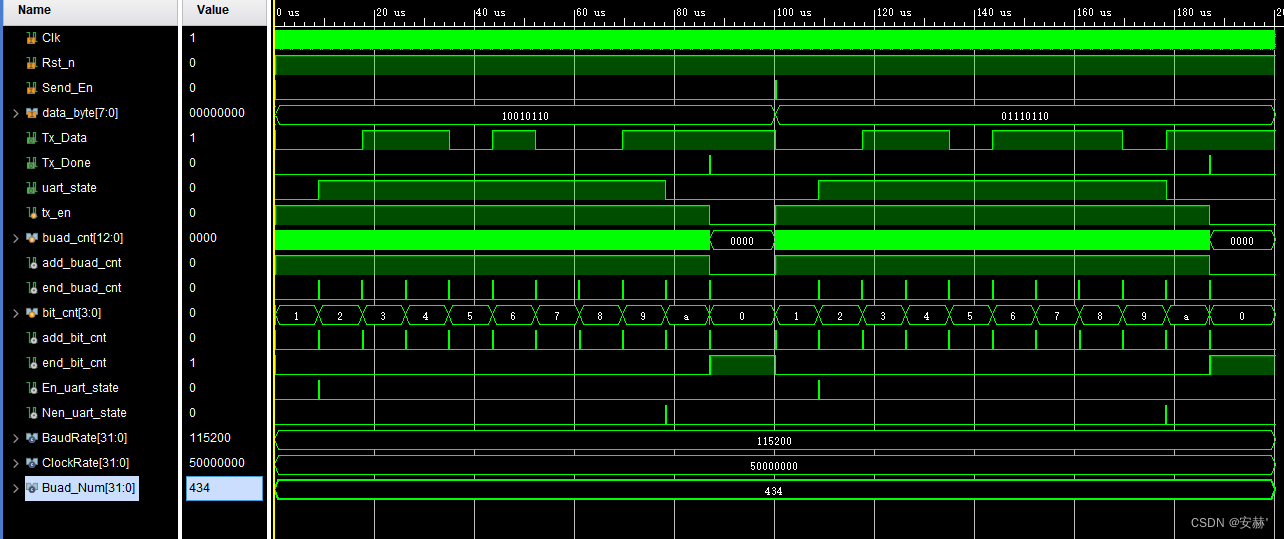
仿真验证`timescale 1ns / 1ps // // Company: // Engineer: // // Create Date: 2023/01/06 11:31:09 // Design Name: // Module Name: UART_Byte_Tx_tb // Project Name: // Target Devices: // Tool Versions: // Description: // // Dependencies: // // Revision: // Revision 0.01 - File Created // Additional Comments: // // module UART_Byte_Tx_tb(); reg Clk; reg Rst_n; reg Send_En; reg [7:0]data_byte; wire Tx_Data; wire Tx_Done; wire uart_state; initial Clk=1; always #10 Clk=~Clk; initial begin Rst_n=0; Send_En=0; data_byte=0; #201; Rst_n=1; data_byte=8'b1001_0110; Send_En=1; #20; Send_En=0; #100000; data_byte=8'b0111_0110; Send_En=1; #20; Send_En=0; #100000; $stop; end UART_Byte_Tx UART_Byte_Tx( .Clk(Clk), .Rst_n(Rst_n), .Send_En(Send_En), .data_byte(data_byte), .Tx_Data(Tx_Data), .Tx_Done(Tx_Done), .uart_state(uart_state) ); endmodule- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
按键控制串口发送
RTL视图

`timescale 1ns / 1ps // // Company: // Engineer: // // Create Date: 2023/01/07 13:43:42 // Design Name: // Module Name: Uart_Key_Send_cmd // Project Name: // Target Devices: // Tool Versions: // Description: // // Dependencies: // // Revision: // Revision 0.01 - File Created // Additional Comments: // // module Uart_Key_Send_cmd( Clk, Rst_n, Key_in, uart_tx ); input Clk; input Rst_n; input Key_in; output uart_tx; //按键模块 wire Key_flag; wire Key_State; key_filter key_filter( Clk, Rst_n, Key_in, Key_flag, //按键按下标志位 Key_State //高电平,按键按下 ); //串口发送 reg [7:0] data_byte; wire Tx_Done; wire uart_state; //assign data_byte=8'b0100_0001; //发送A always@(posedge Clk or negedge Rst_n)begin if(!Rst_n) data_byte<=8'b0100_0001; //发送A else if(Tx_Done) data_byte<=data_byte+1'b1;//数据加一 end UART_Byte_Tx UART_Byte_Tx( .Clk(Clk), .Rst_n(Rst_n), .Send_En(Key_flag), .data_byte(data_byte), .Tx_Data(uart_tx), .Tx_Done(Tx_Done), .uart_state(uart_state) ); endmodule- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
板级验证 -
相关阅读:
重载PreTranslateMessage响应CTreeCtrl控件的回车键后运行程序出现中断ASSERT(::IsWindow(m_hWnd));
21天打卡进阶Python基础操作
【信息化】软考高项(信息系统项目管理师)论文自我总结精华和模板
【文末附gpt升级方案】数据虚拟化技术:起源、发展及市场趋势
2023MathorCup(妈妈杯) 数学建模挑战赛 解题思路
ubuntu 20.04 A10配置deepstream6.1.1环境(dGPU)
2.MySQL ---- 修改数据库的字符集(日常小技巧)
outsystems合集系列(四)
Java 是值传递还是?
将MindSpore运行结果输出到log文件
- 原文地址:https://blog.csdn.net/m0_55849362/article/details/136549403
