-
YOLO算法改进Backbone系列之:EfficientViT
EfficientViT: Memory Effificient Vision Transformer with Cascaded Group Attention
摘要:视觉transformer由于其高模型能力而取得了巨大的成功。然而,它们卓越的性能伴随着沉重的计算成本,这使得它们不适合实时应用。在这篇论文中,本文提出了一个高速视觉transformer家族,名为EfficientViT。本文发现现有的transformer模型的速度通常受到内存低效操作的限制,特别是在MHSA中的张量重塑和单元函数。因此,本文设计了一种具有三明治布局的新构建块,即在高效FFN层之间使用单个内存绑定的MHSA,从而提高了内存效率,同时增强了信道通信。此外,本文发现注意图在头部之间具有很高的相似性,从而导致计算冗余。为了解决这个问题,本文提出了一个级联的群体注意模块,以不同的完整特征分割来馈送注意头,不仅节省了计算成本,而且提高了注意多样性。综合实验表明,高效vit优于现有的高效模型,在速度和精度之间取得了良好的平衡。例如,本文的EfficientViT-M5在准确率上比MobileNetV3-Large高出1.9%,而在Nvidia V100 GPU和Intel Xeon CPU上的吞吐量分别高出40.4%和45.2%。与最近的高效型号MobileViT-XXS相比,efficientvitt - m2的精度提高了1.8%,同时在GPU/CPU上运行速度提高了5.8 ×/3.7 ×,转换为ONNX格式时速度提高了7.4×本文通过分析DeiT和Swin两个Transformer架构得出如下结论:
- 适当降低MHSA层利用率可以在提高模型性能的同时提高访存效率
- 在不同的头部使用不同的通道划分特征,而不是像MHSA那样对所有头部使用相同的全特征,可以有效地减少注意力计算冗余
- 典型的通道配置,即在每个阶段之后将通道数加倍或对所有块使用等效通道,可能在最后几个块中产生大量冗余
- 在维度相同的情况下,Q、K的冗余度比V大得多 a new building block with a sandwich
layout(减少self-attention的次数):之前是一个block self-attention->fc->self-attention->fc->self-attention->fc->…N次数;现在是一个blockfc->self-attention->fc;不仅能够提升内存效率而且能够增强通道间的计算
cascaded group attention:让多头串联学习特征:第一个头学习完特征后,第二个头利用第一个头学习到的特征的基础上再去学习(原来的transformer是第二个头跟第一个头同时独立地去学习),同理第三个头学习时也得利用上第二个头学习的结果再去学习
Efficientvit模型结构如下图所示:
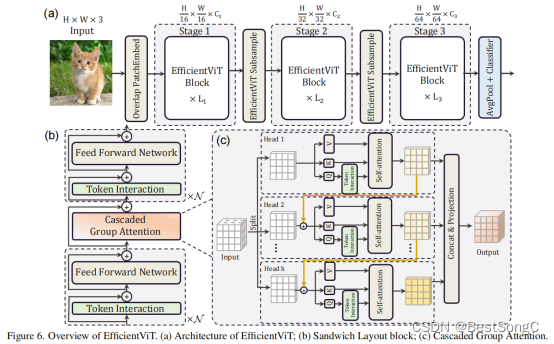
a memory-efficient sandwich layout


Cascaded Group Attention:解决了原来模型中多头重复学习(学习到的特征很多都是相似的)的问题,这里每个头学到的特征都不同,而且越往下面的头学到的特征越丰富。

Q是主动查询的行为,特征比K更加丰富,所以额外做了个Token Interation
Q进行self-attention之前先通过多次分组卷积再一次学习
Parameter Reallocation
self-attention主要在进行QK,而且还需要对Q/K进行reshape,所以为了运算效率更快,Q与K的维度小一点
而V只在后面被QK得到的结果进行权重分配,没那么费劲,为了学习更多的特征,所以V维度更大一些Efficientvit变体模型结构如下表所示:

在YOLOv5项目中添加EfficientViT模型作为Backbone使用的教程:
(1)将YOLOv5项目的models/yolo.py修改parse_model函数以及BaseModel的_forward_once函数def parse_model(d, ch): # model_dict, input_channels(3) # Parse a YOLOv5 model.yaml dictionary LOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}") anchors, nc, gd, gw, act = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple'], d.get('activation') if act: Conv.default_act = eval(act) # redefine default activation, i.e. Conv.default_act = nn.SiLU() LOGGER.info(f"{colorstr('activation:')} {act}") # print na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors no = na * (nc + 5) # number of outputs = anchors * (classes + 5) # --------------------------------------------------------------------------------------------------- is_backbone = False layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args try: t = m m = eval(m) if isinstance(m, str) else m # eval strings except: pass for j, a in enumerate(args): with contextlib.suppress(NameError): try: args[j] = eval(a) if isinstance(a, str) else a # eval strings except: args[j] = a n = n_ = max(round(n * gd), 1) if n > 1 else n # depth gain if m in { Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, MixConv2d, Focus, CrossConv, BottleneckCSP, C3, C3TR, C3SPP, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x}: c1, c2 = ch[f], args[0] if c2 != no: # if not output c2 = make_divisible(c2 * gw, 8) args = [c1, c2, *args[1:]] if m in {BottleneckCSP, C3, C3TR, C3Ghost, C3x}: args.insert(2, n) # number of repeats n = 1 elif m is nn.BatchNorm2d: args = [ch[f]] elif m is Concat: c2 = sum(ch[x] for x in f) # TODO: channel, gw, gd elif m in {Detect, Segment}: args.append([ch[x] for x in f]) if isinstance(args[1], int): # number of anchors args[1] = [list(range(args[1] * 2))] * len(f) if m is Segment: args[3] = make_divisible(args[3] * gw, 8) elif m is Contract: c2 = ch[f] * args[0] ** 2 elif m is Expand: c2 = ch[f] // args[0] ** 2 # ------------------------------------------------------------------------------------- elif m in {}: m = m(*args) c2 = m.channel # ------------------------------------------------------------------------------------- else: c2 = ch[f] # ------------------------------------------------------------------------------------- if isinstance(c2, list): is_backbone = True m_ = m m_.backbone = True else: m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module t = str(m)[8:-2].replace('__main__.', '') # module type # ------------------------------------------------------------------------------------- np = sum(x.numel() for x in m_.parameters()) # number params # ------------------------------------------------------------------------------------- # m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params m_.i, m_.f, m_.type, m_.np = i + 4 if is_backbone else i, f, t, np # attach index, 'from' index, type, number params # ------------------------------------------------------------------------------------- LOGGER.info(f'{i:>3}{str(f):>18}{n_:>3}{np:10.0f} {t:<40}{str(args):<30}') # print save.extend(x % (i + 4 if is_backbone else i) for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist # save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist layers.append(m_) if i == 0: ch = [] # ------------------------------------------------------------------------------------- if isinstance(c2, list): ch.extend(c2) for _ in range(5 - len(ch)): ch.insert(0, 0) else: ch.append(c2) # ------------------------------------------------------------------------------------- return nn.Sequential(*layers), sorted(save) def _forward_once(self, x, profile=False, visualize=False): y, dt = [], [] # outputs for m in self.model: if m.f != -1: # if not from previous layer x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers if profile: self._profile_one_layer(m, x, dt) if hasattr(m, 'backbone'): x = m(x) for _ in range(5 - len(x)): x.insert(0, None) for i_idx, i in enumerate(x): if i_idx in self.save: y.append(i) else: y.append(None) x = x[-1] else: x = m(x) # run y.append(x if m.i in self.save else None) # save output if visualize: feature_visualization(x, m.type, m.i, save_dir=visualize) return x- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
(2)在models/backbone(新建)文件下新建EfficientViT.py,添加如下的代码:
# -------------------------------------------------------- # EfficientViT Model Architecture for Downstream Tasks # Copyright (c) 2022 Microsoft # Written by: Xinyu Liu # -------------------------------------------------------- import torch import torch.nn as nn import torch.nn.functional as F import torch.utils.checkpoint as checkpoint import itertools from timm.models.layers import SqueezeExcite import numpy as np import itertools __all__ = ['EfficientViT_M0', 'EfficientViT_M1', 'EfficientViT_M2', 'EfficientViT_M3', 'EfficientViT_M4', 'EfficientViT_M5'] class Conv2d_BN(torch.nn.Sequential): def __init__(self, a, b, ks=1, stride=1, pad=0, dilation=1, groups=1, bn_weight_init=1, resolution=-10000): super().__init__() self.add_module('c', torch.nn.Conv2d( a, b, ks, stride, pad, dilation, groups, bias=False)) self.add_module('bn', torch.nn.BatchNorm2d(b)) torch.nn.init.constant_(self.bn.weight, bn_weight_init) torch.nn.init.constant_(self.bn.bias, 0) @torch.no_grad() def fuse(self): c, bn = self._modules.values() w = bn.weight / (bn.running_var + bn.eps)**0.5 w = c.weight * w[:, None, None, None] b = bn.bias - bn.running_mean * bn.weight / \ (bn.running_var + bn.eps)**0.5 m = torch.nn.Conv2d(w.size(1) * self.c.groups, w.size( 0), w.shape[2:], stride=self.c.stride, padding=self.c.padding, dilation=self.c.dilation, groups=self.c.groups) m.weight.data.copy_(w) m.bias.data.copy_(b) return m def replace_batchnorm(net): for child_name, child in net.named_children(): if hasattr(child, 'fuse'): setattr(net, child_name, child.fuse()) elif isinstance(child, torch.nn.BatchNorm2d): setattr(net, child_name, torch.nn.Identity()) else: replace_batchnorm(child) class PatchMerging(torch.nn.Module): def __init__(self, dim, out_dim, input_resolution): super().__init__() hid_dim = int(dim * 4) self.conv1 = Conv2d_BN(dim, hid_dim, 1, 1, 0, resolution=input_resolution) self.act = torch.nn.ReLU() self.conv2 = Conv2d_BN(hid_dim, hid_dim, 3, 2, 1, groups=hid_dim, resolution=input_resolution) self.se = SqueezeExcite(hid_dim, .25) self.conv3 = Conv2d_BN(hid_dim, out_dim, 1, 1, 0, resolution=input_resolution // 2) def forward(self, x): x = self.conv3(self.se(self.act(self.conv2(self.act(self.conv1(x)))))) return x class Residual(torch.nn.Module): def __init__(self, m, drop=0.): super().__init__() self.m = m self.drop = drop def forward(self, x): if self.training and self.drop > 0: return x + self.m(x) * torch.rand(x.size(0), 1, 1, 1, device=x.device).ge_(self.drop).div(1 - self.drop).detach() else: return x + self.m(x) class FFN(torch.nn.Module): def __init__(self, ed, h, resolution): super().__init__() self.pw1 = Conv2d_BN(ed, h, resolution=resolution) self.act = torch.nn.ReLU() self.pw2 = Conv2d_BN(h, ed, bn_weight_init=0, resolution=resolution) def forward(self, x): x = self.pw2(self.act(self.pw1(x))) return x class CascadedGroupAttention(torch.nn.Module): r""" Cascaded Group Attention. Args: dim (int): Number of input channels. key_dim (int): The dimension for query and key. num_heads (int): Number of attention heads. attn_ratio (int): Multiplier for the query dim for value dimension. resolution (int): Input resolution, correspond to the window size. kernels (List[int]): The kernel size of the dw conv on query. """ def __init__(self, dim, key_dim, num_heads=8, attn_ratio=4, resolution=14, kernels=[5, 5, 5, 5],): super().__init__() self.num_heads = num_heads self.scale = key_dim ** -0.5 self.key_dim = key_dim self.d = int(attn_ratio * key_dim) self.attn_ratio = attn_ratio qkvs = [] dws = [] for i in range(num_heads): qkvs.append(Conv2d_BN(dim // (num_heads), self.key_dim * 2 + self.d, resolution=resolution)) dws.append(Conv2d_BN(self.key_dim, self.key_dim, kernels[i], 1, kernels[i]//2, groups=self.key_dim, resolution=resolution)) self.qkvs = torch.nn.ModuleList(qkvs) self.dws = torch.nn.ModuleList(dws) self.proj = torch.nn.Sequential(torch.nn.ReLU(), Conv2d_BN( self.d * num_heads, dim, bn_weight_init=0, resolution=resolution)) points = list(itertools.product(range(resolution), range(resolution))) N = len(points) attention_offsets = {} idxs = [] for p1 in points: for p2 in points: offset = (abs(p1[0] - p2[0]), abs(p1[1] - p2[1])) if offset not in attention_offsets: attention_offsets[offset] = len(attention_offsets) idxs.append(attention_offsets[offset]) self.attention_biases = torch.nn.Parameter( torch.zeros(num_heads, len(attention_offsets))) self.register_buffer('attention_bias_idxs', torch.LongTensor(idxs).view(N, N)) @torch.no_grad() def train(self, mode=True): super().train(mode) if mode and hasattr(self, 'ab'): del self.ab else: self.ab = self.attention_biases[:, self.attention_bias_idxs] def forward(self, x): # x (B,C,H,W) B, C, H, W = x.shape trainingab = self.attention_biases[:, self.attention_bias_idxs] feats_in = x.chunk(len(self.qkvs), dim=1) feats_out = [] feat = feats_in[0] for i, qkv in enumerate(self.qkvs): if i > 0: # add the previous output to the input feat = feat + feats_in[i] feat = qkv(feat) q, k, v = feat.view(B, -1, H, W).split([self.key_dim, self.key_dim, self.d], dim=1) # B, C/h, H, W q = self.dws[i](q) q, k, v = q.flatten(2), k.flatten(2), v.flatten(2) # B, C/h, N attn = ( (q.transpose(-2, -1) @ k) * self.scale + (trainingab[i] if self.training else self.ab[i]) ) attn = attn.softmax(dim=-1) # BNN feat = (v @ attn.transpose(-2, -1)).view(B, self.d, H, W) # BCHW feats_out.append(feat) x = self.proj(torch.cat(feats_out, 1)) return x class LocalWindowAttention(torch.nn.Module): r""" Local Window Attention. Args: dim (int): Number of input channels. key_dim (int): The dimension for query and key. num_heads (int): Number of attention heads. attn_ratio (int): Multiplier for the query dim for value dimension. resolution (int): Input resolution. window_resolution (int): Local window resolution. kernels (List[int]): The kernel size of the dw conv on query. """ def __init__(self, dim, key_dim, num_heads=8, attn_ratio=4, resolution=14, window_resolution=7, kernels=[5, 5, 5, 5],): super().__init__() self.dim = dim self.num_heads = num_heads self.resolution = resolution assert window_resolution > 0, 'window_size must be greater than 0' self.window_resolution = window_resolution self.attn = CascadedGroupAttention(dim, key_dim, num_heads, attn_ratio=attn_ratio, resolution=window_resolution, kernels=kernels,) def forward(self, x): B, C, H, W = x.shape if H <= self.window_resolution and W <= self.window_resolution: x = self.attn(x) else: x = x.permute(0, 2, 3, 1) pad_b = (self.window_resolution - H % self.window_resolution) % self.window_resolution pad_r = (self.window_resolution - W % self.window_resolution) % self.window_resolution padding = pad_b > 0 or pad_r > 0 if padding: x = torch.nn.functional.pad(x, (0, 0, 0, pad_r, 0, pad_b)) pH, pW = H + pad_b, W + pad_r nH = pH // self.window_resolution nW = pW // self.window_resolution # window partition, BHWC -> B(nHh)(nWw)C -> BnHnWhwC -> (BnHnW)hwC -> (BnHnW)Chw x = x.view(B, nH, self.window_resolution, nW, self.window_resolution, C).transpose(2, 3).reshape( B * nH * nW, self.window_resolution, self.window_resolution, C ).permute(0, 3, 1, 2) x = self.attn(x) # window reverse, (BnHnW)Chw -> (BnHnW)hwC -> BnHnWhwC -> B(nHh)(nWw)C -> BHWC x = x.permute(0, 2, 3, 1).view(B, nH, nW, self.window_resolution, self.window_resolution, C).transpose(2, 3).reshape(B, pH, pW, C) if padding: x = x[:, :H, :W].contiguous() x = x.permute(0, 3, 1, 2) return x class EfficientViTBlock(torch.nn.Module): """ A basic EfficientViT building block. Args: type (str): Type for token mixer. Default: 's' for self-attention. ed (int): Number of input channels. kd (int): Dimension for query and key in the token mixer. nh (int): Number of attention heads. ar (int): Multiplier for the query dim for value dimension. resolution (int): Input resolution. window_resolution (int): Local window resolution. kernels (List[int]): The kernel size of the dw conv on query. """ def __init__(self, type, ed, kd, nh=8, ar=4, resolution=14, window_resolution=7, kernels=[5, 5, 5, 5],): super().__init__() self.dw0 = Residual(Conv2d_BN(ed, ed, 3, 1, 1, groups=ed, bn_weight_init=0., resolution=resolution)) self.ffn0 = Residual(FFN(ed, int(ed * 2), resolution)) if type == 's': self.mixer = Residual(LocalWindowAttention(ed, kd, nh, attn_ratio=ar, \ resolution=resolution, window_resolution=window_resolution, kernels=kernels)) self.dw1 = Residual(Conv2d_BN(ed, ed, 3, 1, 1, groups=ed, bn_weight_init=0., resolution=resolution)) self.ffn1 = Residual(FFN(ed, int(ed * 2), resolution)) def forward(self, x): return self.ffn1(self.dw1(self.mixer(self.ffn0(self.dw0(x))))) class EfficientViT(torch.nn.Module): def __init__(self, img_size=400, patch_size=16, frozen_stages=0, in_chans=3, stages=['s', 's', 's'], embed_dim=[64, 128, 192], key_dim=[16, 16, 16], depth=[1, 2, 3], num_heads=[4, 4, 4], window_size=[7, 7, 7], kernels=[5, 5, 5, 5], down_ops=[['subsample', 2], ['subsample', 2], ['']], pretrained=None, distillation=False,): super().__init__() resolution = img_size self.patch_embed = torch.nn.Sequential(Conv2d_BN(in_chans, embed_dim[0] // 8, 3, 2, 1, resolution=resolution), torch.nn.ReLU(), Conv2d_BN(embed_dim[0] // 8, embed_dim[0] // 4, 3, 2, 1, resolution=resolution // 2), torch.nn.ReLU(), Conv2d_BN(embed_dim[0] // 4, embed_dim[0] // 2, 3, 2, 1, resolution=resolution // 4), torch.nn.ReLU(), Conv2d_BN(embed_dim[0] // 2, embed_dim[0], 3, 1, 1, resolution=resolution // 8)) resolution = img_size // patch_size attn_ratio = [embed_dim[i] / (key_dim[i] * num_heads[i]) for i in range(len(embed_dim))] self.blocks1 = [] self.blocks2 = [] self.blocks3 = [] for i, (stg, ed, kd, dpth, nh, ar, wd, do) in enumerate( zip(stages, embed_dim, key_dim, depth, num_heads, attn_ratio, window_size, down_ops)): for d in range(dpth): eval('self.blocks' + str(i+1)).append(EfficientViTBlock(stg, ed, kd, nh, ar, resolution, wd, kernels)) if do[0] == 'subsample': #('Subsample' stride) blk = eval('self.blocks' + str(i+2)) resolution_ = (resolution - 1) // do[1] + 1 blk.append(torch.nn.Sequential(Residual(Conv2d_BN(embed_dim[i], embed_dim[i], 3, 1, 1, groups=embed_dim[i], resolution=resolution)), Residual(FFN(embed_dim[i], int(embed_dim[i] * 2), resolution)),)) blk.append(PatchMerging(*embed_dim[i:i + 2], resolution)) resolution = resolution_ blk.append(torch.nn.Sequential(Residual(Conv2d_BN(embed_dim[i + 1], embed_dim[i + 1], 3, 1, 1, groups=embed_dim[i + 1], resolution=resolution)), Residual(FFN(embed_dim[i + 1], int(embed_dim[i + 1] * 2), resolution)),)) self.blocks1 = torch.nn.Sequential(*self.blocks1) self.blocks2 = torch.nn.Sequential(*self.blocks2) self.blocks3 = torch.nn.Sequential(*self.blocks3) self.channel = [i.size(1) for i in self.forward(torch.randn(1, 3, 640, 640))] def forward(self, x): outs = [] x = self.patch_embed(x) x = self.blocks1(x) outs.append(x) x = self.blocks2(x) outs.append(x) x = self.blocks3(x) outs.append(x) return outs EfficientViT_m0 = { 'img_size': 224, 'patch_size': 16, 'embed_dim': [64, 128, 192], 'depth': [1, 2, 3], 'num_heads': [4, 4, 4], 'window_size': [7, 7, 7], 'kernels': [7, 5, 3, 3], } EfficientViT_m1 = { 'img_size': 224, 'patch_size': 16, 'embed_dim': [128, 144, 192], 'depth': [1, 2, 3], 'num_heads': [2, 3, 3], 'window_size': [7, 7, 7], 'kernels': [7, 5, 3, 3], } EfficientViT_m2 = { 'img_size': 224, 'patch_size': 16, 'embed_dim': [128, 192, 224], 'depth': [1, 2, 3], 'num_heads': [4, 3, 2], 'window_size': [7, 7, 7], 'kernels': [7, 5, 3, 3], } EfficientViT_m3 = { 'img_size': 224, 'patch_size': 16, 'embed_dim': [128, 240, 320], 'depth': [1, 2, 3], 'num_heads': [4, 3, 4], 'window_size': [7, 7, 7], 'kernels': [5, 5, 5, 5], } EfficientViT_m4 = { 'img_size': 224, 'patch_size': 16, 'embed_dim': [128, 256, 384], 'depth': [1, 2, 3], 'num_heads': [4, 4, 4], 'window_size': [7, 7, 7], 'kernels': [7, 5, 3, 3], } EfficientViT_m5 = { 'img_size': 224, 'patch_size': 16, 'embed_dim': [192, 288, 384], 'depth': [1, 3, 4], 'num_heads': [3, 3, 4], 'window_size': [7, 7, 7], 'kernels': [7, 5, 3, 3], } def EfficientViT_M0(pretrained='', frozen_stages=0, distillation=False, fuse=False, pretrained_cfg=None, model_cfg=EfficientViT_m0): model = EfficientViT(frozen_stages=frozen_stages, distillation=distillation, pretrained=pretrained, **model_cfg) if pretrained: model.load_state_dict(update_weight(model.state_dict(), torch.load(pretrained)['model'])) if fuse: replace_batchnorm(model) return model def EfficientViT_M1(pretrained='', frozen_stages=0, distillation=False, fuse=False, pretrained_cfg=None, model_cfg=EfficientViT_m1): model = EfficientViT(frozen_stages=frozen_stages, distillation=distillation, pretrained=pretrained, **model_cfg) if pretrained: model.load_state_dict(update_weight(model.state_dict(), torch.load(pretrained)['model'])) if fuse: replace_batchnorm(model) return model def EfficientViT_M2(pretrained='', frozen_stages=0, distillation=False, fuse=False, pretrained_cfg=None, model_cfg=EfficientViT_m2): model = EfficientViT(frozen_stages=frozen_stages, distillation=distillation, pretrained=pretrained, **model_cfg) if pretrained: model.load_state_dict(update_weight(model.state_dict(), torch.load(pretrained)['model'])) if fuse: replace_batchnorm(model) return model def EfficientViT_M3(pretrained='', frozen_stages=0, distillation=False, fuse=False, pretrained_cfg=None, model_cfg=EfficientViT_m3): model = EfficientViT(frozen_stages=frozen_stages, distillation=distillation, pretrained=pretrained, **model_cfg) if pretrained: model.load_state_dict(update_weight(model.state_dict(), torch.load(pretrained)['model'])) if fuse: replace_batchnorm(model) return model def EfficientViT_M4(pretrained='', frozen_stages=0, distillation=False, fuse=False, pretrained_cfg=None, model_cfg=EfficientViT_m4): model = EfficientViT(frozen_stages=frozen_stages, distillation=distillation, pretrained=pretrained, **model_cfg) if pretrained: model.load_state_dict(update_weight(model.state_dict(), torch.load(pretrained)['model'])) if fuse: replace_batchnorm(model) return model def EfficientViT_M5(pretrained='', frozen_stages=0, distillation=False, fuse=False, pretrained_cfg=None, model_cfg=EfficientViT_m5): model = EfficientViT(frozen_stages=frozen_stages, distillation=distillation, pretrained=pretrained, **model_cfg) if pretrained: model.load_state_dict(update_weight(model.state_dict(), torch.load(pretrained)['model'])) if fuse: replace_batchnorm(model) return model def update_weight(model_dict, weight_dict): idx, temp_dict = 0, {} for k, v in weight_dict.items(): # k = k[9:] if k in model_dict.keys() and np.shape(model_dict[k]) == np.shape(v): temp_dict[k] = v idx += 1 model_dict.update(temp_dict) print(f'loading weights... {idx}/{len(model_dict)} items') return model_dict- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
- 403
- 404
- 405
- 406
- 407
- 408
- 409
- 410
- 411
- 412
- 413
- 414
- 415
- 416
- 417
- 418
- 419
- 420
- 421
- 422
- 423
- 424
- 425
- 426
- 427
- 428
- 429
- 430
- 431
- 432
- 433
- 434
- 435
- 436
- 437
- 438
- 439
- 440
- 441
- 442
- 443
- 444
- 445
- 446
- 447
- 448
- 449
(3)在models/yolo.py导入EfficientViT模型并在parse_model函数中修改如下:
from models.backbone.EfficientViT import * --------------------------------------------------- elif m in {EfficientViT_M0, EfficientViT_M1, EfficientViT_M2, EfficientViT_M3, EfficientViT_M4, EfficientViT_M5,}: m = m(*args) c2 = m.channel ---------------------------------------------------- 1
- 2
- 3
- 4
- 5
- 6
- 7
(4)在model下面新建配置文件:yolov5-efficientvit.yaml
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license # Parameters nc: 80 # number of classes depth_multiple: 0.33 # model depth multiple width_multiple: 0.25 # layer channel multiple anchors: - [10,13, 16,30, 33,23] # P3/8 - [30,61, 62,45, 59,119] # P4/16 - [116,90, 156,198, 373,326] # P5/32 # YOLOv5 v6.0 backbone backbone: # [from, number, module, args] [[-1, 1, EfficientViT_M0, []], # 4 [-1, 1, SPPF, [1024, 5]], # 5 ] # YOLOv5 v6.0 head head: [[-1, 1, Conv, [512, 1, 1]], # 6 [-1, 1, nn.Upsample, [None, 2, 'nearest']], # 7 [[-1, 3], 1, Concat, [1]], # cat backbone P4 8 [-1, 3, C3, [512, False]], # 9 [-1, 1, Conv, [256, 1, 1]], # 10 [-1, 1, nn.Upsample, [None, 2, 'nearest']], # 11 [[-1, 2], 1, Concat, [1]], # cat backbone P3 12 [-1, 3, C3, [256, False]], # 13 (P3/8-small) [-1, 1, Conv, [256, 3, 2]], # 14 [[-1, 10], 1, Concat, [1]], # cat head P4 15 [-1, 3, C3, [512, False]], # 16 (P4/16-medium) [-1, 1, Conv, [512, 3, 2]], # 17 [[-1, 5], 1, Concat, [1]], # cat head P5 18 [-1, 3, C3, [1024, False]], # 19 (P5/32-large) [[13, 16, 19], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5) ]- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
(5)运行验证:在models/yolo.py文件指定–cfg参数为新建的yolov5-efficientvit.yaml
from n params module arguments 0 -1 1 2155680 EfficientViT_M0 [] 1 -1 1 117440 models.common.SPPF [192, 256, 5] 2 -1 1 33024 models.common.Conv [256, 128, 1, 1] 3 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest'] 4 [-1, 3] 1 0 models.common.Concat [1] 5 -1 1 90880 models.common.C3 [256, 128, 1, False] 6 -1 1 8320 models.common.Conv [128, 64, 1, 1] 7 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest'] 8 [-1, 2] 1 0 models.common.Concat [1] 9 -1 1 22912 models.common.C3 [128, 64, 1, False] 10 -1 1 36992 models.common.Conv [64, 64, 3, 2] 11 [-1, 10] 1 0 models.common.Concat [1] 12 -1 1 74496 models.common.C3 [128, 128, 1, False] 13 -1 1 147712 models.common.Conv [128, 128, 3, 2] 14 [-1, 5] 1 0 models.common.Concat [1] 15 -1 1 329216 models.common.C3 [384, 256, 1, False] 16 [13, 16, 19] 1 115005 Detect [80, [[10, 13, 16, 30, 33, 23], [30, 61, 62, 45, 59, 119], [116, 90, 156, 198, 373, 326]], [64, 128, 256]] YOLOv5-efficientvit summary: 582 layers, 3131677 parameters, 3131677 gradients Fusing layers... YOLOv5-efficientvit summary: 556 layers, 3129213 parameters, 3129213 gradients- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
目前整个项目计划更新至少有50+Vision Transformer Backbone,以及一些其他的改进策略,另外后续也会同步更新改进后的模型在MS COCO数据集上从零开始训练得到的模型权重和训练结果。想要了解项目的朋友私信博主或关注gzh:BestSongC 发送yolo改进即可获取项目信息。
-
相关阅读:
AppGallery Connect场景化开发实战—图片存储分享
电脑出现关于kernelbase.dll文件找不到的情况,有什么办法可以解决?
iceoryx源码阅读(八)——IPC通信机制
基于Pyflwdir实现流域的提取(参照官网例子)
NLP基本业务范围
会计学基础重点
折线图geom_line()参数选项
Mysql各种锁
wifi码系统贴牌源码定制开发搭建oem
git stash详解
- 原文地址:https://blog.csdn.net/sc1434404661/article/details/136287484
