-
Linux C 线程间同步机制
概述
同进程内的所有线程共同使用进程的内存空间,并且线程可以在直接应用层完成,因此线程和线程之间的通信使用“全局变量”即可完成通信。但是由于 Linux 系统没有数据保护方式,所在在线程通信的时候需要进行数据的“同步保护”。
在同进程中的多个线程都要操作的数据进行保护时,只允许一个线程操作要保护的内容。Linux 系统使用“信号量”、“互斥锁”以及“条件变量”来实现数据同步保护。实现数据保护的流程为:
①创建一种使用的保护机制(信号量、互斥锁或条件变量)。
②在操作保护内容之前,加保护(一旦本线程加保护成功,其他线程在操作就会阻塞)。
③在操作保护内容后,解保护(其他线程自动取消阻塞)。
④删除保护机制。
注:线程间的数据保护机制是一种人为的约束,一定要所有线程都要遵循这个操作才会有意义,同时“加保护”、“解保护”操作在一个线程中一定要成对出现。保护机制
互斥锁
创建互斥锁 pthread_mutex_init
头文件
#include
函数原型:int pthread_mutex_init(pthread_mutex_t *restrict mutex,const pthread_mutexattr_t *restrict attr);
参数介绍:
mutex:互斥锁编号。
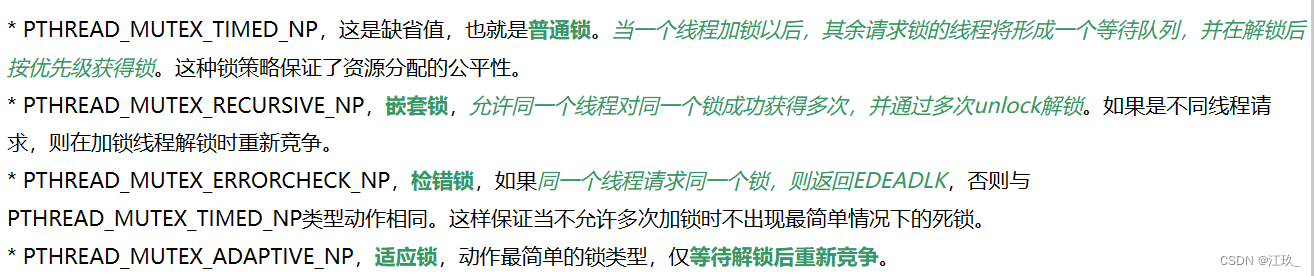
attr:互斥锁的属性。
返回值:成功返回 0,失败返回-1,并且设置 errno 变量来指示错误的发生。pthread_mutex_t mutexid; pthread_mutex_init(&mutexid,NULL);- 1
- 2
加锁 pthread_mutex_lock
头文件
#include
函数原型:int pthread_mutex_lock(pthread_mutex_t *mutex);
参数介绍:
mutex:互斥锁编号。
返回值:成功返回 0,失败返回-1,并且设置 errno 变量来指示错误的发生。pthread_mutex_lock(&mutexid);- 1
解锁 pthread_mutex_unlock
头文件
#include
函数原型:int pthread_mutex_unlock(pthread_mutex_t *mutex);
参数介绍:
mutex:互斥锁编号。
返回值:成功返回 0,失败返回-1,并且设置 errno 变量来指示错误的发生。
返回值:pthread_mutex_unlock(&mutexid);- 1
删除锁 pthread_mutex_destroy
头文件
#include
函数原型:int pthread_mutex_destroy(pthread_mutex_t *mutex)
参数介绍:
mutex:互斥锁编号。
返回值:成功返回 0,失败返回-1,并且设置 errno 变量来指示错误的发生。
返回值:pthread_mutex_destroy(&mutexid);- 1
条件变量
创建条件变量 pthread_cond_init
头文件
#include
函数原型:int pthread_cond_init(pthread_cond_t *restrict cond,const pthread_condattr_t *restrict attr);
参数介绍:
cond:条件变量编号。
mutex:条件变量的属性。
返回值:成功返回 0,失败返回-1,并且设置 errno 变量来指示错误的发生。pthread_cond_t condid; pthread_cond_init(&condid,NULL);- 1
- 2
激活条件变量 pthread_cond_signal
头文件
#include
函数原型:int pthread_cond_signal(pthread_cond_t *cond);
参数介绍:
cond:条件变量编号。
返回值:成功返回 0,失败返回-1,并且设置 errno 变量来指示错误的发生。pthread_cond_signal(&condid);- 1
等待条件变量 pthread_cond_wait
头文件
#include
函数原型:int pthread_cond_wait(pthread_cond_t *restrict cond,pthread_mutex_t *restrict mutex);
参数介绍:
cond:条件变量编号。
mutex:条件变量的属性。
返回值:成功返回 0,失败返回-1,并且设置 errno 变量来指示错误的发生。pthread_cond_wait(&condid,&mutexid);- 1
删除条件变量 pthread_cond_destroy
头文件
#include
函数原型:int pthread_cond_destroy(pthread_cond_t *cond);
参数介绍:
cond:条件变量编号。
返回值:成功返回 0,失败返回-1,并且设置 errno 变量来指示错误的发生。pthread_cond_destroy(&condid);- 1
信号灯
创建信号量 sem_init
头文件
#include
函数原型:==int sem_init(sem_t *sem, int pshared, unsigned int value); ==
参数介绍:
sem:信号量编号。
pshared:信号量在作用范围(0:本进程中多个线程共享可用;非 0:在当前登录用户的多个进程之间共享)。
value:信号量的信号值。
返回值:成功返回 0,失败返回-1,并且设置 errno 变量来指示错误的发生。sem_t semid; sem_init(&semid,0, 1);- 1
- 2
信号量加保护 sem_wait
头文件
#include
函数原型:int sem_wait(sem_t * sem);
参数介绍:
sem:信号量编号。
返回值:成功返回 0,失败返回-1,并且设置 errno 变量来指示错误的发生。sem_wait(&semid);- 1
信号量解保护 sem_post
头文件
#include
函数原型:int sem_post(sem_t * sem);
参数介绍:
sem:信号量编号。
返回值:成功返回 0,失败返回-1,并且设置 errno 变量来指示错误的发生。sem_post(&semid);- 1
信号量删除 sem_destroy
头文件
#include
函数原型:int sem_destroy(sem_t * sem);
参数介绍:
sem:信号量编号。
返回值:成功返回 0,失败返回-1,并且设置 errno 变量来指示错误的发生。sem_destroy(&semid);- 1
线程间通信的例子
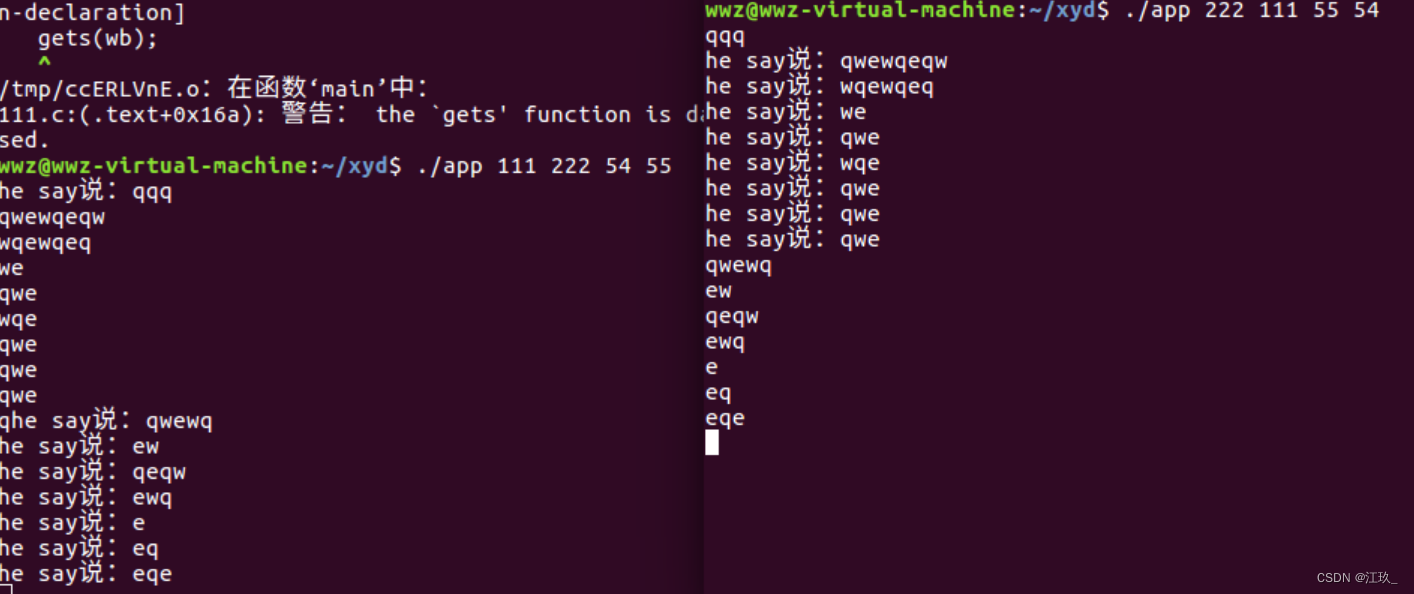
#include#include #include #include #include #include #include #include #include #include #include #include #include char path[10]; //信号服务函数 void * son_fun(void * arg) { int fd2 = open(path,O_RDWR); //打开读管道 while(1) { char rb[512] = {0}; read(fd2,rb,sizeof(rb)); printf("%s说:%s\n",(char *)arg,rb); } close(fd2); //关闭读管道 } //关于argv: // 1 是读通道 2 是写通道 3 是自己的信号 4 是发的信号 int main(int argc,char *argv[]) { //init pthread_t id; strcpy(path,argv[2]); //创建管道 int val1 = mkfifo(argv[1],0666); int val2 = mkfifo(argv[2],0666); //打开管道 int fd1 = open(argv[1],O_RDWR); //写管道 //创建子线程 pthread_create(&id,NULL,son_fun,"he say");//创建子线程 //等待写入 while(1) { char wb[512] = {0}; gets(wb); write(fd1,wb,strlen(wb)); } close(fd1); pthread_join(id,NULL); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
-
相关阅读:
基于SSH的高校实验室物品管理信息系统的设计与实现 论文文档+项目源码及数据库文件
java LevelDB工具类
菜狗杯Misc一层一层一层地剥开我的♥wp
通过霍夫直线检测方式获取直线,自定义提取直线(提取出两条接近平行的直线),将直线进行拟合
科技前沿:IDEA插件Translation v3.6 带来革命性更新,翻译和发音更智能!
Vue3表单输入绑定&生命周期
开放式运动耳机哪款好,盘点几款目前最好的开放式耳机分享
基于招聘网站的大数据专业相关招聘信息建模与可视化分析
读书感悟【Vue.js设计与实现】第1章 权衡的艺术 【Vue进阶系列】
Kafka关键点总结-消息的顺序性
- 原文地址:https://blog.csdn.net/weixin_52604835/article/details/134449497
