-
ORB SLAM3 使用二进制文件 ORBvoc.bin 加载Vocabulary
使用 二进制文件 ORBvoc.bin 加载Vocabulary,将比ORBvoc.txt 速度快很多倍!
实测1秒内完成加载:

一、下载ORBvoc.bin
百度网盘: ORBvoc.bin下载链接 提取码:dyyk
解压后,将ORBvoc.bin拷贝到Vocabulary文件夹下
二、修改代码
2.1 修改 Thirdparty/DBoW2/DBoW2/TemplatedVocabulary.h
①249 行在 “TextFile”类型 的下面 加入 loadFromBinaryFile() 函数 和 saveToBinaryFile() 函数的声明:
- /**
- * Loads the vocabulary from a binary file
- * @param filename
- */
- bool loadFromBinaryFile(const std::string &filename);
- /**
- * Saves the vocabulary into a binary file
- * @param filename
- */
- void saveToBinaryFile(const std::string &filename) const;
如图:

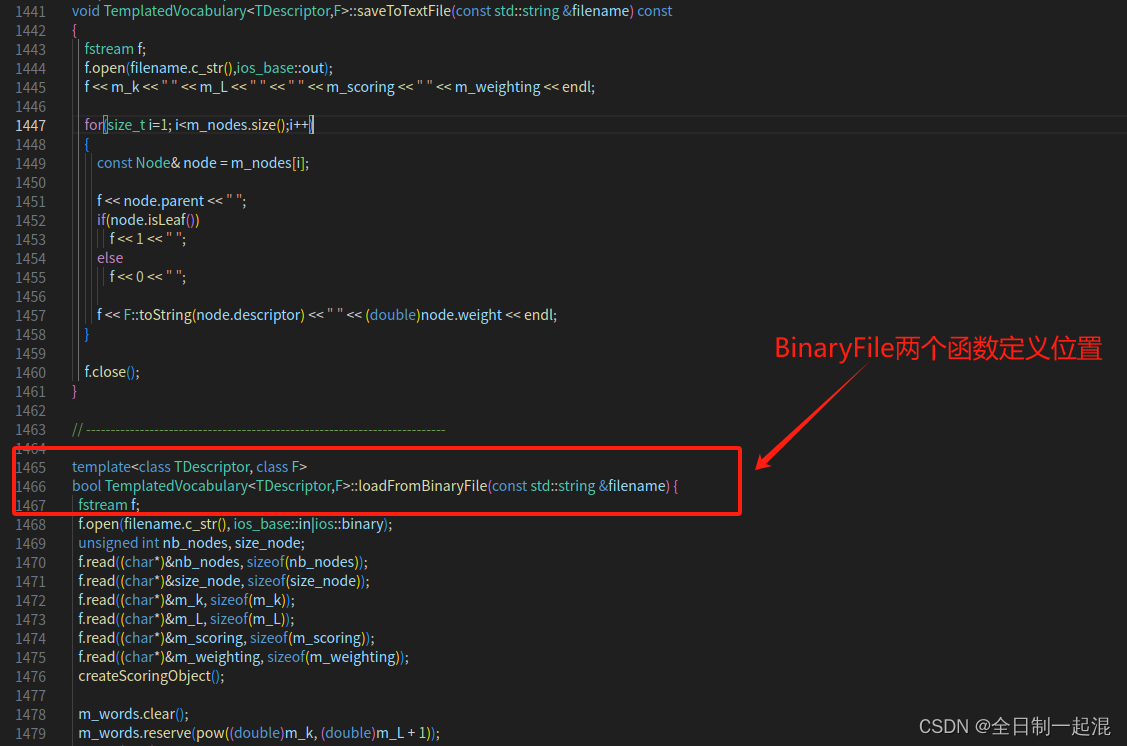
② 加入上面两个函数的定义:
我们就写在 1465行左右 的saveToTextFile()函数定义的后面 :
- template<class TDescriptor, class F>
- bool TemplatedVocabulary
- fstream f;
- f.open(filename.c_str(), ios_base::in|ios::binary);
- unsigned int nb_nodes, size_node;
- f.read((char*)&nb_nodes, sizeof(nb_nodes));
- f.read((char*)&size_node, sizeof(size_node));
- f.read((char*)&m_k, sizeof(m_k));
- f.read((char*)&m_L, sizeof(m_L));
- f.read((char*)&m_scoring, sizeof(m_scoring));
- f.read((char*)&m_weighting, sizeof(m_weighting));
- createScoringObject();
- m_words.clear();
- m_words.reserve(pow((double)m_k, (double)m_L + 1));
- m_nodes.clear();
- m_nodes.resize(nb_nodes+1);
- m_nodes[0].id = 0;
- char buf[size_node]; int nid = 1;
- while (!f.eof()) {
- f.read(buf, size_node);
- m_nodes[nid].id = nid;
- // FIXME
- const int* ptr=(int*)buf;
- m_nodes[nid].parent = *ptr;
- //m_nodes[nid].parent = *(const int*)buf;
- m_nodes[m_nodes[nid].parent].children.push_back(nid);
- m_nodes[nid].descriptor = cv::Mat(1, F::L, CV_8U);
- memcpy(m_nodes[nid].descriptor.data, buf+4, F::L);
- m_nodes[nid].weight = *(float*)(buf+4+F::L);
- if (buf[8+F::L]) { // is leaf
- int wid = m_words.size();
- m_words.resize(wid+1);
- m_nodes[nid].word_id = wid;
- m_words[wid] = &m_nodes[nid];
- }
- else
- m_nodes[nid].children.reserve(m_k);
- nid+=1;
- }
- f.close();
- return true;
- }
- // --------------------------------------------------------------------------
- template<class TDescriptor, class F>
- void TemplatedVocabulary
- fstream f;
- f.open(filename.c_str(), ios_base::out|ios::binary);
- unsigned int nb_nodes = m_nodes.size();
- float _weight;
- unsigned int size_node = sizeof(m_nodes[0].parent) + F::L*sizeof(char) + sizeof(_weight) + sizeof(bool);
- f.write((char*)&nb_nodes, sizeof(nb_nodes));
- f.write((char*)&size_node, sizeof(size_node));
- f.write((char*)&m_k, sizeof(m_k));
- f.write((char*)&m_L, sizeof(m_L));
- f.write((char*)&m_scoring, sizeof(m_scoring));
- f.write((char*)&m_weighting, sizeof(m_weighting));
- for(size_t i=1; iconst Node& node = m_nodes[i];f.write((char*)&node.parent, sizeof(node.parent));f.write((char*)node.descriptor.data, F::L);_weight = node.weight; f.write((char*)&_weight, sizeof(_weight));bool is_leaf = node.isLeaf(); f.write((char*)&is_leaf, sizeof(is_leaf)); // i put this one at the end for alignement....}f.close();}// --------------------------------------------------------------------------
位置如图:
2.2 修改 ORB_SLAM3/src/System.cc
修改加载词袋的类型为 :BinaryFile
- mpVocabulary = new ORBVocabulary();
- //bool bVocLoad = mpVocabulary->loadFromTextFile(strVocFile); //txt加载
- bool bVocLoad = mpVocabulary->loadFromBinaryFile(strVocFile); //bin加载
三、运行
3.1 重新编译ORB-SLAM3
./build.sh3.2 运行
运行时,需要把原来加载词袋命令 ./Vocabulary/ORBvoc.txt 改成 ./Vocabulary/ORBvoc.bin
如运行 EuRoc 单目时:
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.bin ./Examples/Monocular/EuRoC.yaml "$pathDatasetEuroc"/MH01 ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt
- 相关阅读:
docker错误集-CentOS环境
天玑900和麒麟810性能哪个好?
.NET混合开发解决方案8 WinForm程序中通过设置固定版本运行时的BrowserExecutableFolder属性集成WebView2控件
VL53L0X V2激光测距传感器 采集距离数据串口输出
人参果
git push入门
痞子衡嵌入式:对比MbedTLS算法库纯软件实现与i.MXRT上DCP,CAAM硬件加速器实现性能差异
面试官:如何打破双亲委派机制?
代码随想录算法训练营第五十八天| 583. 两个字符串的删除操作 72. 编辑距离
2023.11.18 - hadoop之zookeeper分布式协调服务
- 原文地址:https://blog.csdn.net/weixin_62952541/article/details/134443113
