-
工程(十四)——ubuntu20.04 PL-VINS
博主创建了一个科研互助群Q:772356582,欢迎大家加入讨论。这是一个科研互助群,主要围绕机器人,无人驾驶,无人机方面的感知定位,决策规划,以及论文发表经验,以方便大家很好很快的科研,少走弯路。欢迎在群里积极提问与回答,相互交流共同学习。

一、简介
PL-VINS是基于最先进的基于点的VINS- mono,开发的一种基于点和线特征的实时、高效优化的单目VINS方法。原始的 PL-VINS 是在ubuntu18.04基于opencv3去开发的。源码的下载地址:https://github.com/cnqiangfu/PL-VINS
我的配置:ubuntu20.04+opencv4.2+eigen3.3.7
更改好的代码如下,可直接用,需要修改mage_node_b.cpp的main函数第一行的地址
huashu996/Ubuntu20.04PL_VINS · GitHub
二、编译
如果你使用官方的代码,编译时候可能会遇到如下问题
- mkdir -p ~/catkin_plvins/src
- cd catkin_plvins/src //进入创建的catkin_plvins/src文件夹下
- catkin_init_workspace 进行空间创建
- cd ~/catkin_plvins //在文件夹catkin_plvins下建立终端输入
- catkin_make //终端输入
- source devel/setup.bash
- echo $ROS_PACKAGE_PATH
- //将代码下载到src目录下 或者执行下面代码
- cd ~/catkin_plvins/src
- git clone https://github.com/cnqiangfu/PL-VINS.git
- //编译
- cd .. //回到文件夹catkin_plvins
- catkin_make
- source devel/setup.bash
- 将feature_tracker里面的Cmakelist修改一下:主要修改以下2处的路径

- 打开catkin_plvins/src/PL-VINS/image_node_b文件下的CMakeLists.txt添加
set(CMAKE_CXX_STANDARD 14)如果你配置正确,应该能够编译顺利通过
三、opencv4适配
但运行往往会出现如下图问题,对于每个问题我们一次解决

- [image_node_b-7] 挂掉的原因是linefeature_tracker_node中只发布了归一化坐标,没有发布linefeature的startpoint和endpoint的像素坐标。
1.mage_node_b.cpp的main函数第一行的地址,修改原绝对地址。

2.加入project函数
- void project(cv::Point2f& pt, cv::Mat const& k)
- {
- pt.x=k.at<float>(0,0)*pt.x+k.at<float>(0,2);
- pt.y=k.at<float>(1,1)*pt.y+k.at<float>(1,2);
- }
3.替换
- 将下面两行
- cv::Point startPoint = cv::Point(line_feature_msg->channels[3].values[i], line_feature_msg->channels[4].values[i]);
- cv::Point endPoint = cv::Point(line_feature_msg->channels[5].values[i], line_feature_msg->channels[6].values[i]);
- 替换
- cv::Point2f startPoint = cv::Point2f(line_feature_msg->points[i].x,line_feature_msg->points[i].y );
- project (startPoint,K_);
- cv::Point2f endPoint = cv::Point2f(line_feature_msg->channels[1].values[i],line_feature_msg->channels[2].values[i]);
- [linefeature_tracker-4]
此问题由于opencv和cv_bridge冲突的问题,因为在ubuntu20.04 cv_bridge是4,如果你使用opencv3那么将产生冲突,如果使用opencv4跑,代码本身又不支持opencv4所以需要更改。相应的解决方式也有两种:
1)把vins-mono代码全部改成opencv4的版本 或者 2)把cv_bridge改成opencv3版本。参考如下博客修改
【精选】Ubuntu20.04下成功运行VINS-mono_ubuntu vinsmono-CSDN博客
1.将所有包含opencv的Cmakelists.txt中opencv引入都换成4,如下

2.更新头文件使使用opencv4
- (1)将camera_model包改成兼容opencv4
- 在camera_model包中的头文件Chessboard.h中添加
- #include
- #include
- 在CameraCalibration.h中添加
- #include
- #include
- (2)将包中所有报错的头文件
- #include
- #include
- 替换为
- #include
- #include
3.加入线特征检测函数
imgproc.hpp关于线特征的部分由于opencv4权限的问题无法使用了,这里只需要自己定义一个相同功能的头文件去把opencv3中的实现拷贝过去。在路径
PL-VINS/src/PL-VINS/feature_tracker/src/line_descriptor/src
创建一个my_lsd.hpp
- //
- // Created by fs on 2021/11/3.
- // This file is my_lsd.hpp
- //
- //#include "opencv2/../../src/precomp.hpp"
- #include "opencv2/imgproc.hpp"
- //#include "opencv2/core/private.hpp"
- #include
- #define M_3_2_PI (3 * CV_PI) / 2 // 3/2 pi
- #define M_2__PI (2 * CV_PI) // 2 pi
- #ifndef M_LN10
- #define M_LN10 2.30258509299404568402
- #endif
- #define NOTDEF double(-1024.0) // Label for pixels with undefined gradient.
- #define NOTUSED 0 // Label for pixels not used in yet.
- #define USED 1 // Label for pixels already used in detection.
- #define RELATIVE_ERROR_FACTOR 100.0
- const double DEG_TO_RADS = CV_PI / 180;
- #define log_gamma(x) ((x)>15.0?log_gamma_windschitl(x):log_gamma_lanczos(x))
- struct edge
- {
- cv::Point p;
- bool taken;
- };
- inline double distSq(const double x1, const double y1,
- const double x2, const double y2)
- {
- return (x2 - x1)*(x2 - x1) + (y2 - y1)*(y2 - y1);
- }
- inline double dist(const double x1, const double y1,
- const double x2, const double y2)
- {
- return sqrt(distSq(x1, y1, x2, y2));
- }
- // Signed angle difference
- inline double angle_diff_signed(const double& a, const double& b)
- {
- double diff = a - b;
- while(diff <= -CV_PI) diff += M_2__PI;
- while(diff > CV_PI) diff -= M_2__PI;
- return diff;
- }
- // Absolute value angle difference
- inline double angle_diff(const double& a, const double& b)
- {
- return std::fabs(angle_diff_signed(a, b));
- }
- // Compare doubles by relative error.
- inline bool double_equal(const double& a, const double& b)
- {
- // trivial case
- if(a == b) return true;
- double abs_diff = fabs(a - b);
- double aa = fabs(a);
- double bb = fabs(b);
- double abs_max = (aa > bb)? aa : bb;
- if(abs_max < DBL_MIN) abs_max = DBL_MIN;
- return (abs_diff / abs_max) <= (RELATIVE_ERROR_FACTOR * DBL_EPSILON);
- }
- inline bool AsmallerB_XoverY(const edge& a, const edge& b)
- {
- if (a.p.x == b.p.x) return a.p.y < b.p.y;
- else return a.p.x < b.p.x;
- }
- /**
- * Computes the natural logarithm of the absolute value of
- * the gamma function of x using Windschitl method.
- * See http://www.rskey.org/gamma.htm
- */
- inline double log_gamma_windschitl(const double& x)
- {
- return 0.918938533204673 + (x-0.5)*log(x) - x
- + 0.5*x*log(x*sinh(1/x) + 1/(810.0*pow(x, 6.0)));
- }
- /**
- * Computes the natural logarithm of the absolute value of
- * the gamma function of x using the Lanczos approximation.
- * See http://www.rskey.org/gamma.htm
- */
- inline double log_gamma_lanczos(const double& x)
- {
- static double q[7] = { 75122.6331530, 80916.6278952, 36308.2951477,
- 8687.24529705, 1168.92649479, 83.8676043424,
- 2.50662827511 };
- double a = (x + 0.5) * log(x + 5.5) - (x + 5.5);
- double b = 0;
- for(int n = 0; n < 7; ++n)
- {
- a -= log(x + double(n));
- b += q[n] * pow(x, double(n));
- }
- return a + log(b);
- }
- ///
- namespace cv {
- class myLineSegmentDetectorImpl CV_FINAL : public LineSegmentDetector
- {
- public:
- /**
- * Create a LineSegmentDetectorImpl object. Specifying scale, number of subdivisions for the image, should the lines be refined and other constants as follows:
- *
- * @param _refine How should the lines found be refined?
- * LSD_REFINE_NONE - No refinement applied.
- * LSD_REFINE_STD - Standard refinement is applied. E.g. breaking arches into smaller line approximations.
- * LSD_REFINE_ADV - Advanced refinement. Number of false alarms is calculated,
- * lines are refined through increase of precision, decrement in size, etc.
- * @param _scale The scale of the image that will be used to find the lines. Range (0..1].
- * @param _sigma_scale Sigma for Gaussian filter is computed as sigma = _sigma_scale/_scale.
- * @param _quant Bound to the quantization error on the gradient norm.
- * @param _ang_th Gradient angle tolerance in degrees.
- * @param _log_eps Detection threshold: -log10(NFA) > _log_eps
- * @param _density_th Minimal density of aligned region points in rectangle.
- * @param _n_bins Number of bins in pseudo-ordering of gradient modulus.
- */
- myLineSegmentDetectorImpl(int _refine = LSD_REFINE_STD, double _scale = 0.8,
- double _sigma_scale = 0.6, double _quant = 2.0, double _ang_th = 22.5,
- double _log_eps = 0, double _density_th = 0.7, int _n_bins = 1024);
- /**
- * Detect lines in the input image.
- *
- * @param _image A grayscale(CV_8UC1) input image.
- * If only a roi needs to be selected, use
- * lsd_ptr->detect(image(roi), ..., lines);
- * lines += Scalar(roi.x, roi.y, roi.x, roi.y);
- * @param _lines Return: A vector of Vec4i or Vec4f elements specifying the beginning and ending point of a line.
- * Where Vec4i/Vec4f is (x1, y1, x2, y2), point 1 is the start, point 2 - end.
- * Returned lines are strictly oriented depending on the gradient.
- * @param width Return: Vector of widths of the regions, where the lines are found. E.g. Width of line.
- * @param prec Return: Vector of precisions with which the lines are found.
- * @param nfa Return: Vector containing number of false alarms in the line region, with precision of 10%.
- * The bigger the value, logarithmically better the detection.
- * * -1 corresponds to 10 mean false alarms
- * * 0 corresponds to 1 mean false alarm
- * * 1 corresponds to 0.1 mean false alarms
- * This vector will be calculated _only_ when the objects type is REFINE_ADV
- */
- void detect(InputArray _image, OutputArray _lines,
- OutputArray width = noArray(), OutputArray prec = noArray(),
- OutputArray nfa = noArray()) CV_OVERRIDE;
- /**
- * Draw lines on the given canvas.
- *
- * @param image The image, where lines will be drawn.
- * Should have the size of the image, where the lines were found
- * @param lines The lines that need to be drawn
- */
- void drawSegments(InputOutputArray _image, InputArray lines) CV_OVERRIDE;
- /**
- * Draw both vectors on the image canvas. Uses blue for lines 1 and red for lines 2.
- *
- * @param size The size of the image, where lines1 and lines2 were found.
- * @param lines1 The first lines that need to be drawn. Color - Blue.
- * @param lines2 The second lines that need to be drawn. Color - Red.
- * @param image An optional image, where lines will be drawn.
- * Should have the size of the image, where the lines were found
- * @return The number of mismatching pixels between lines1 and lines2.
- */
- int compareSegments(const Size& size, InputArray lines1, InputArray lines2, InputOutputArray _image = noArray()) CV_OVERRIDE;
- private:
- Mat image;
- Mat scaled_image;
- Mat_<double> angles; // in rads
- Mat_<double> modgrad;
- Mat_
used; - int img_width;
- int img_height;
- double LOG_NT;
- bool w_needed;
- bool p_needed;
- bool n_needed;
- const double SCALE;
- const int doRefine;
- const double SIGMA_SCALE;
- const double QUANT;
- const double ANG_TH;
- const double LOG_EPS;
- const double DENSITY_TH;
- const int N_BINS;
- struct RegionPoint {
- int x;
- int y;
- uchar* used;
- double angle;
- double modgrad;
- };
- struct normPoint
- {
- Point2i p;
- int norm;
- };
- std::vector
ordered_points; - struct rect
- {
- double x1, y1, x2, y2; // first and second point of the line segment
- double width; // rectangle width
- double x, y; // center of the rectangle
- double theta; // angle
- double dx,dy; // (dx,dy) is vector oriented as the line segment
- double prec; // tolerance angle
- double p; // probability of a point with angle within 'prec'
- };
- myLineSegmentDetectorImpl& operator= (const myLineSegmentDetectorImpl&); // to quiet MSVC
- /**
- * Detect lines in the whole input image.
- *
- * @param lines Return: A vector of Vec4f elements specifying the beginning and ending point of a line.
- * Where Vec4f is (x1, y1, x2, y2), point 1 is the start, point 2 - end.
- * Returned lines are strictly oriented depending on the gradient.
- * @param widths Return: Vector of widths of the regions, where the lines are found. E.g. Width of line.
- * @param precisions Return: Vector of precisions with which the lines are found.
- * @param nfas Return: Vector containing number of false alarms in the line region, with precision of 10%.
- * The bigger the value, logarithmically better the detection.
- * * -1 corresponds to 10 mean false alarms
- * * 0 corresponds to 1 mean false alarm
- * * 1 corresponds to 0.1 mean false alarms
- */
- void flsd(std::vector
& lines, - std::vector<double>& widths, std::vector<double>& precisions,
- std::vector<double>& nfas);
- /**
- * Finds the angles and the gradients of the image. Generates a list of pseudo ordered points.
- *
- * @param threshold The minimum value of the angle that is considered defined, otherwise NOTDEF
- * @param n_bins The number of bins with which gradients are ordered by, using bucket sort.
- * @param ordered_points Return: Vector of coordinate points that are pseudo ordered by magnitude.
- * Pixels would be ordered by norm value, up to a precision given by max_grad/n_bins.
- */
- void ll_angle(const double& threshold, const unsigned int& n_bins);
- /**
- * Grow a region starting from point s with a defined precision,
- * returning the containing points size and the angle of the gradients.
- *
- * @param s Starting point for the region.
- * @param reg Return: Vector of points, that are part of the region
- * @param reg_angle Return: The mean angle of the region.
- * @param prec The precision by which each region angle should be aligned to the mean.
- */
- void region_grow(const Point2i& s, std::vector
& reg, - double& reg_angle, const double& prec);
- /**
- * Finds the bounding rotated rectangle of a region.
- *
- * @param reg The region of points, from which the rectangle to be constructed from.
- * @param reg_angle The mean angle of the region.
- * @param prec The precision by which points were found.
- * @param p Probability of a point with angle within 'prec'.
- * @param rec Return: The generated rectangle.
- */
- void region2rect(const std::vector
& reg, const double reg_angle, - const double prec, const double p, rect& rec) const;
- /**
- * Compute region's angle as the principal inertia axis of the region.
- * @return Regions angle.
- */
- double get_theta(const std::vector
& reg, const double& x, - const double& y, const double& reg_angle, const double& prec) const;
- /**
- * An estimation of the angle tolerance is performed by the standard deviation of the angle at points
- * near the region's starting point. Then, a new region is grown starting from the same point, but using the
- * estimated angle tolerance. If this fails to produce a rectangle with the right density of region points,
- * 'reduce_region_radius' is called to try to satisfy this condition.
- */
- bool refine(std::vector
& reg, double reg_angle, - const double prec, double p, rect& rec, const double& density_th);
- /**
- * Reduce the region size, by elimination the points far from the starting point, until that leads to
- * rectangle with the right density of region points or to discard the region if too small.
- */
- bool reduce_region_radius(std::vector
& reg, double reg_angle, - const double prec, double p, rect& rec, double density, const double& density_th);
- /**
- * Try some rectangles variations to improve NFA value. Only if the rectangle is not meaningful (i.e., log_nfa <= log_eps).
- * @return The new NFA value.
- */
- double rect_improve(rect& rec) const;
- /**
- * Calculates the number of correctly aligned points within the rectangle.
- * @return The new NFA value.
- */
- double rect_nfa(const rect& rec) const;
- /**
- * Computes the NFA values based on the total number of points, points that agree.
- * n, k, p are the binomial parameters.
- * @return The new NFA value.
- */
- double nfa(const int& n, const int& k, const double& p) const;
- /**
- * Is the point at place 'address' aligned to angle theta, up to precision 'prec'?
- * @return Whether the point is aligned.
- */
- bool isAligned(int x, int y, const double& theta, const double& prec) const;
- public:
- // Compare norm
- static inline bool compare_norm( const normPoint& n1, const normPoint& n2 )
- {
- return (n1.norm > n2.norm);
- }
- };
- CV_EXPORTS Ptr
createLineSegmentDetector( - int _refine, double _scale, double _sigma_scale, double _quant, double _ang_th,
- double _log_eps, double _density_th, int _n_bins)
- {
- return makePtr
( - _refine, _scale, _sigma_scale, _quant, _ang_th,
- _log_eps, _density_th, _n_bins);
- }
- myLineSegmentDetectorImpl::myLineSegmentDetectorImpl(int _refine, double _scale, double _sigma_scale, double _quant,
- double _ang_th, double _log_eps, double _density_th, int _n_bins)
- :img_width(0), img_height(0), LOG_NT(0), w_needed(false), p_needed(false), n_needed(false),
- SCALE(_scale), doRefine(_refine), SIGMA_SCALE(_sigma_scale), QUANT(_quant),
- ANG_TH(_ang_th), LOG_EPS(_log_eps), DENSITY_TH(_density_th), N_BINS(_n_bins)
- {
- CV_Assert(_scale > 0 && _sigma_scale > 0 && _quant >= 0 &&
- _ang_th > 0 && _ang_th < 180 && _density_th >= 0 && _density_th < 1 &&
- _n_bins > 0);
- // CV_UNUSED(_refine); CV_UNUSED(_log_eps);
- // CV_Error(Error::StsNotImplemented, "Implementation has been removed due original code license issues");
- }
- void myLineSegmentDetectorImpl::detect(InputArray _image, OutputArray _lines,
- OutputArray _width, OutputArray _prec, OutputArray _nfa)
- {
- // CV_INSTRUMENT_REGION();
- image = _image.getMat();
- CV_Assert(!image.empty() && image.type() == CV_8UC1);
- std::vector
lines; - std::vector<double> w, p, n;
- w_needed = _width.needed();
- p_needed = _prec.needed();
- if (doRefine < LSD_REFINE_ADV)
- n_needed = false;
- else
- n_needed = _nfa.needed();
- flsd(lines, w, p, n);
- Mat(lines).copyTo(_lines);
- if(w_needed) Mat(w).copyTo(_width);
- if(p_needed) Mat(p).copyTo(_prec);
- if(n_needed) Mat(n).copyTo(_nfa);
- // Clear used structures
- ordered_points.clear();
- // CV_UNUSED(_image); CV_UNUSED(_lines);
- // CV_UNUSED(_width); CV_UNUSED(_prec); CV_UNUSED(_nfa);
- // CV_Error(Error::StsNotImplemented, "Implementation has been removed due original code license issues");
- }
- void myLineSegmentDetectorImpl::drawSegments(InputOutputArray _image, InputArray lines)
- {
- // CV_INSTRUMENT_REGION();
- CV_Assert(!_image.empty() && (_image.channels() == 1 || _image.channels() == 3));
- if (_image.channels() == 1)
- {
- cvtColor(_image, _image, COLOR_GRAY2BGR);
- }
- Mat _lines = lines.getMat();
- const int N = _lines.checkVector(4);
- CV_Assert(_lines.depth() == CV_32F || _lines.depth() == CV_32S);
- // Draw segments
- if (_lines.depth() == CV_32F)
- {
- for (int i = 0; i < N; ++i)
- {
- const Vec4f& v = _lines.at
(i); - const Point2f b(v[0], v[1]);
- const Point2f e(v[2], v[3]);
- line(_image, b, e, Scalar(0, 0, 255), 1);
- }
- }
- else
- {
- for (int i = 0; i < N; ++i)
- {
- const Vec4i& v = _lines.at
(i); - const Point2i b(v[0], v[1]);
- const Point2i e(v[2], v[3]);
- line(_image, b, e, Scalar(0, 0, 255), 1);
- }
- }
- }
- int myLineSegmentDetectorImpl::compareSegments(const Size& size, InputArray lines1, InputArray lines2, InputOutputArray _image)
- {
- // CV_INSTRUMENT_REGION();
- Size sz = size;
- if (_image.needed() && _image.size() != size) sz = _image.size();
- CV_Assert(!sz.empty());
- Mat_
I1 = Mat_ ::zeros(sz); - Mat_
I2 = Mat_ ::zeros(sz); - Mat _lines1 = lines1.getMat();
- Mat _lines2 = lines2.getMat();
- const int N1 = _lines1.checkVector(4);
- const int N2 = _lines2.checkVector(4);
- CV_Assert(_lines1.depth() == CV_32F || _lines1.depth() == CV_32S);
- CV_Assert(_lines2.depth() == CV_32F || _lines2.depth() == CV_32S);
- if (_lines1.depth() == CV_32S)
- _lines1.convertTo(_lines1, CV_32F);
- if (_lines2.depth() == CV_32S)
- _lines2.convertTo(_lines2, CV_32F);
- // Draw segments
- for(int i = 0; i < N1; ++i)
- {
- const Point2f b(_lines1.at
(i)[0], _lines1.at ;(i)[1]) - const Point2f e(_lines1.at
(i)[2], _lines1.at ;(i)[3]) - line(I1, b, e, Scalar::all(255), 1);
- }
- for(int i = 0; i < N2; ++i)
- {
- const Point2f b(_lines2.at
(i)[0], _lines2.at ;(i)[1]) - const Point2f e(_lines2.at
(i)[2], _lines2.at ;(i)[3]) - line(I2, b, e, Scalar::all(255), 1);
- }
- // Count the pixels that don't agree
- Mat Ixor;
- bitwise_xor(I1, I2, Ixor);
- int N = countNonZero(Ixor);
- if (_image.needed())
- {
- CV_Assert(_image.channels() == 3);
- Mat img = _image.getMatRef();
- CV_Assert(img.isContinuous() && I1.isContinuous() && I2.isContinuous());
- for (unsigned int i = 0; i < I1.total(); ++i)
- {
- uchar i1 = I1.ptr()[i];
- uchar i2 = I2.ptr()[i];
- if (i1 || i2)
- {
- unsigned int base_idx = i * 3;
- if (i1) img.ptr()[base_idx] = 255;
- else img.ptr()[base_idx] = 0;
- img.ptr()[base_idx + 1] = 0;
- if (i2) img.ptr()[base_idx + 2] = 255;
- else img.ptr()[base_idx + 2] = 0;
- }
- }
- }
- return N;
- }
- void myLineSegmentDetectorImpl::flsd(std::vector
& lines, - std::vector<double>& widths, std::vector<double>& precisions,
- std::vector<double>& nfas)
- {
- // Angle tolerance
- const double prec = CV_PI * ANG_TH / 180;
- const double p = ANG_TH / 180;
- const double rho = QUANT / sin(prec); // gradient magnitude threshold
- if(SCALE != 1)
- {
- Mat gaussian_img;
- const double sigma = (SCALE < 1)?(SIGMA_SCALE / SCALE):(SIGMA_SCALE);
- const double sprec = 3;
- const unsigned int h = (unsigned int)(ceil(sigma * sqrt(2 * sprec * log(10.0))));
- Size ksize(1 + 2 * h, 1 + 2 * h); // kernel size
- GaussianBlur(image, gaussian_img, ksize, sigma);
- // Scale image to needed size
- resize(gaussian_img, scaled_image, Size(), SCALE, SCALE, INTER_LINEAR_EXACT);
- ll_angle(rho, N_BINS);
- }
- else
- {
- scaled_image = image;
- ll_angle(rho, N_BINS);
- }
- LOG_NT = 5 * (log10(double(img_width)) + log10(double(img_height))) / 2 + log10(11.0);
- const size_t min_reg_size = size_t(-LOG_NT/log10(p)); // minimal number of points in region that can give a meaningful event
- // // Initialize region only when needed
- // Mat region = Mat::zeros(scaled_image.size(), CV_8UC1);
- used = Mat_
::zeros(scaled_image.size()); // zeros = NOTUSED - std::vector
reg; - // Search for line segments
- for(size_t i = 0, points_size = ordered_points.size(); i < points_size; ++i)
- {
- const Point2i& point = ordered_points[i].p;
- if((used.at
(point) == NOTUSED) && (angles.at<double>(point) != NOTDEF)) - {
- double reg_angle;
- region_grow(ordered_points[i].p, reg, reg_angle, prec);
- // Ignore small regions
- if(reg.size() < min_reg_size) { continue; }
- // Construct rectangular approximation for the region
- rect rec;
- region2rect(reg, reg_angle, prec, p, rec);
- double log_nfa = -1;
- if(doRefine > LSD_REFINE_NONE)
- {
- // At least REFINE_STANDARD lvl.
- if(!refine(reg, reg_angle, prec, p, rec, DENSITY_TH)) { continue; }
- if(doRefine >= LSD_REFINE_ADV)
- {
- // Compute NFA
- log_nfa = rect_improve(rec);
- if(log_nfa <= LOG_EPS) { continue; }
- }
- }
- // Found new line
- // Add the offset
- rec.x1 += 0.5; rec.y1 += 0.5;
- rec.x2 += 0.5; rec.y2 += 0.5;
- // scale the result values if a sub-sampling was performed
- if(SCALE != 1)
- {
- rec.x1 /= SCALE; rec.y1 /= SCALE;
- rec.x2 /= SCALE; rec.y2 /= SCALE;
- rec.width /= SCALE;
- }
- //Store the relevant data
- lines.push_back(Vec4f(float(rec.x1), float(rec.y1), float(rec.x2), float(rec.y2)));
- if(w_needed) widths.push_back(rec.width);
- if(p_needed) precisions.push_back(rec.p);
- if(n_needed && doRefine >= LSD_REFINE_ADV) nfas.push_back(log_nfa);
- }
- }
- }
- void myLineSegmentDetectorImpl::ll_angle(const double& threshold,
- const unsigned int& n_bins)
- {
- //Initialize data
- angles = Mat_<double>(scaled_image.size());
- modgrad = Mat_<double>(scaled_image.size());
- img_width = scaled_image.cols;
- img_height = scaled_image.rows;
- // Undefined the down and right boundaries
- angles.row(img_height - 1).setTo(NOTDEF);
- angles.col(img_width - 1).setTo(NOTDEF);
- // Computing gradient for remaining pixels
- double max_grad = -1;
- for(int y = 0; y < img_height - 1; ++y)
- {
- const uchar* scaled_image_row = scaled_image.ptr
(y); - const uchar* next_scaled_image_row = scaled_image.ptr
(y+1); - double* angles_row = angles.ptr<double>(y);
- double* modgrad_row = modgrad.ptr<double>(y);
- for(int x = 0; x < img_width-1; ++x)
- {
- int DA = next_scaled_image_row[x + 1] - scaled_image_row[x];
- int BC = scaled_image_row[x + 1] - next_scaled_image_row[x];
- int gx = DA + BC; // gradient x component
- int gy = DA - BC; // gradient y component
- double norm = std::sqrt((gx * gx + gy * gy) / 4.0); // gradient norm
- modgrad_row[x] = norm; // store gradient
- if (norm <= threshold) // norm too small, gradient no defined
- {
- angles_row[x] = NOTDEF;
- }
- else
- {
- angles_row[x] = fastAtan2(float(gx), float(-gy)) * DEG_TO_RADS; // gradient angle computation
- if (norm > max_grad) { max_grad = norm; }
- }
- }
- }
- // Compute histogram of gradient values
- double bin_coef = (max_grad > 0) ? double(n_bins - 1) / max_grad : 0; // If all image is smooth, max_grad <= 0
- for(int y = 0; y < img_height - 1; ++y)
- {
- const double* modgrad_row = modgrad.ptr<double>(y);
- for(int x = 0; x < img_width - 1; ++x)
- {
- normPoint _point;
- int i = int(modgrad_row[x] * bin_coef);
- _point.p = Point(x, y);
- _point.norm = i;
- ordered_points.push_back(_point);
- }
- }
- // Sort
- std::sort(ordered_points.begin(), ordered_points.end(), compare_norm);
- }
- void myLineSegmentDetectorImpl::region_grow(const Point2i& s, std::vector
& reg, - double& reg_angle, const double& prec)
- {
- reg.clear();
- // Point to this region
- RegionPoint seed;
- seed.x = s.x;
- seed.y = s.y;
- seed.used = &used.at
(s); - reg_angle = angles.at<double>(s);
- seed.angle = reg_angle;
- seed.modgrad = modgrad.at<double>(s);
- reg.push_back(seed);
- float sumdx = float(std::cos(reg_angle));
- float sumdy = float(std::sin(reg_angle));
- *seed.used = USED;
- //Try neighboring regions
- for (size_t i = 0;i
- {
- const RegionPoint& rpoint = reg[i];
- int xx_min = std::max(rpoint.x - 1, 0), xx_max = std::min(rpoint.x + 1, img_width - 1);
- int yy_min = std::max(rpoint.y - 1, 0), yy_max = std::min(rpoint.y + 1, img_height - 1);
- for(int yy = yy_min; yy <= yy_max; ++yy)
- {
- uchar* used_row = used.ptr
(yy); - const double* angles_row = angles.ptr<double>(yy);
- const double* modgrad_row = modgrad.ptr<double>(yy);
- for(int xx = xx_min; xx <= xx_max; ++xx)
- {
- uchar& is_used = used_row[xx];
- if(is_used != USED &&
- (isAligned(xx, yy, reg_angle, prec)))
- {
- const double& angle = angles_row[xx];
- // Add point
- is_used = USED;
- RegionPoint region_point;
- region_point.x = xx;
- region_point.y = yy;
- region_point.used = &is_used;
- region_point.modgrad = modgrad_row[xx];
- region_point.angle = angle;
- reg.push_back(region_point);
- // Update region's angle
- sumdx += cos(float(angle));
- sumdy += sin(float(angle));
- // reg_angle is used in the isAligned, so it needs to be updates?
- reg_angle = fastAtan2(sumdy, sumdx) * DEG_TO_RADS;
- }
- }
- }
- }
- }
- void myLineSegmentDetectorImpl::region2rect(const std::vector
& reg, - const double reg_angle, const double prec, const double p, rect& rec) const
- {
- double x = 0, y = 0, sum = 0;
- for(size_t i = 0; i < reg.size(); ++i)
- {
- const RegionPoint& pnt = reg[i];
- const double& weight = pnt.modgrad;
- x += double(pnt.x) * weight;
- y += double(pnt.y) * weight;
- sum += weight;
- }
- // Weighted sum must differ from 0
- CV_Assert(sum > 0);
- x /= sum;
- y /= sum;
- double theta = get_theta(reg, x, y, reg_angle, prec);
- // Find length and width
- double dx = cos(theta);
- double dy = sin(theta);
- double l_min = 0, l_max = 0, w_min = 0, w_max = 0;
- for(size_t i = 0; i < reg.size(); ++i)
- {
- double regdx = double(reg[i].x) - x;
- double regdy = double(reg[i].y) - y;
- double l = regdx * dx + regdy * dy;
- double w = -regdx * dy + regdy * dx;
- if(l > l_max) l_max = l;
- else if(l < l_min) l_min = l;
- if(w > w_max) w_max = w;
- else if(w < w_min) w_min = w;
- }
- // Store values
- rec.x1 = x + l_min * dx;
- rec.y1 = y + l_min * dy;
- rec.x2 = x + l_max * dx;
- rec.y2 = y + l_max * dy;
- rec.width = w_max - w_min;
- rec.x = x;
- rec.y = y;
- rec.theta = theta;
- rec.dx = dx;
- rec.dy = dy;
- rec.prec = prec;
- rec.p = p;
- // Min width of 1 pixel
- if(rec.width < 1.0) rec.width = 1.0;
- }
- double myLineSegmentDetectorImpl::get_theta(const std::vector
& reg, const double& x, - const double& y, const double& reg_angle, const double& prec) const
- {
- double Ixx = 0.0;
- double Iyy = 0.0;
- double Ixy = 0.0;
- // Compute inertia matrix
- for(size_t i = 0; i < reg.size(); ++i)
- {
- const double& regx = reg[i].x;
- const double& regy = reg[i].y;
- const double& weight = reg[i].modgrad;
- double dx = regx - x;
- double dy = regy - y;
- Ixx += dy * dy * weight;
- Iyy += dx * dx * weight;
- Ixy -= dx * dy * weight;
- }
- // Check if inertia matrix is null
- CV_Assert(!(double_equal(Ixx, 0) && double_equal(Iyy, 0) && double_equal(Ixy, 0)));
- // Compute smallest eigenvalue
- double lambda = 0.5 * (Ixx + Iyy - sqrt((Ixx - Iyy) * (Ixx - Iyy) + 4.0 * Ixy * Ixy));
- // Compute angle
- double theta = (fabs(Ixx)>fabs(Iyy))?
- double(fastAtan2(float(lambda - Ixx), float(Ixy))):
- double(fastAtan2(float(Ixy), float(lambda - Iyy))); // in degs
- theta *= DEG_TO_RADS;
- // Correct angle by 180 deg if necessary
- if(angle_diff(theta, reg_angle) > prec) { theta += CV_PI; }
- return theta;
- }
- bool myLineSegmentDetectorImpl::refine(std::vector
& reg, double reg_angle, - const double prec, double p, rect& rec, const double& density_th)
- {
- double density = double(reg.size()) / (dist(rec.x1, rec.y1, rec.x2, rec.y2) * rec.width);
- if (density >= density_th) { return true; }
- // Try to reduce angle tolerance
- double xc = double(reg[0].x);
- double yc = double(reg[0].y);
- const double& ang_c = reg[0].angle;
- double sum = 0, s_sum = 0;
- int n = 0;
- for (size_t i = 0; i < reg.size(); ++i)
- {
- *(reg[i].used) = NOTUSED;
- if (dist(xc, yc, reg[i].x, reg[i].y) < rec.width)
- {
- const double& angle = reg[i].angle;
- double ang_d = angle_diff_signed(angle, ang_c);
- sum += ang_d;
- s_sum += ang_d * ang_d;
- ++n;
- }
- }
- CV_Assert(n > 0);
- double mean_angle = sum / double(n);
- // 2 * standard deviation
- double tau = 2.0 * sqrt((s_sum - 2.0 * mean_angle * sum) / double(n) + mean_angle * mean_angle);
- // Try new region
- region_grow(Point(reg[0].x, reg[0].y), reg, reg_angle, tau);
- if (reg.size() < 2) { return false; }
- region2rect(reg, reg_angle, prec, p, rec);
- density = double(reg.size()) / (dist(rec.x1, rec.y1, rec.x2, rec.y2) * rec.width);
- if (density < density_th)
- {
- return reduce_region_radius(reg, reg_angle, prec, p, rec, density, density_th);
- }
- else
- {
- return true;
- }
- }
- bool myLineSegmentDetectorImpl::reduce_region_radius(std::vector
& reg, double reg_angle, - const double prec, double p, rect& rec, double density, const double& density_th)
- {
- // Compute region's radius
- double xc = double(reg[0].x);
- double yc = double(reg[0].y);
- double radSq1 = distSq(xc, yc, rec.x1, rec.y1);
- double radSq2 = distSq(xc, yc, rec.x2, rec.y2);
- double radSq = radSq1 > radSq2 ? radSq1 : radSq2;
- while(density < density_th)
- {
- radSq *= 0.75*0.75; // Reduce region's radius to 75% of its value
- // Remove points from the region and update 'used' map
- for (size_t i = 0; i < reg.size(); ++i)
- {
- if(distSq(xc, yc, double(reg[i].x), double(reg[i].y)) > radSq)
- {
- // Remove point from the region
- *(reg[i].used) = NOTUSED;
- std::swap(reg[i], reg[reg.size() - 1]);
- reg.pop_back();
- --i; // To avoid skipping one point
- }
- }
- if(reg.size() < 2) { return false; }
- // Re-compute rectangle
- region2rect(reg ,reg_angle, prec, p, rec);
- // Re-compute region points density
- density = double(reg.size()) /
- (dist(rec.x1, rec.y1, rec.x2, rec.y2) * rec.width);
- }
- return true;
- }
- double myLineSegmentDetectorImpl::rect_improve(rect& rec) const
- {
- double delta = 0.5;
- double delta_2 = delta / 2.0;
- double log_nfa = rect_nfa(rec);
- if(log_nfa > LOG_EPS) return log_nfa; // Good rectangle
- // Try to improve
- // Finer precision
- rect r = rect(rec); // Copy
- for(int n = 0; n < 5; ++n)
- {
- r.p /= 2;
- r.prec = r.p * CV_PI;
- double log_nfa_new = rect_nfa(r);
- if(log_nfa_new > log_nfa)
- {
- log_nfa = log_nfa_new;
- rec = rect(r);
- }
- }
- if(log_nfa > LOG_EPS) return log_nfa;
- // Try to reduce width
- r = rect(rec);
- for(unsigned int n = 0; n < 5; ++n)
- {
- if((r.width - delta) >= 0.5)
- {
- r.width -= delta;
- double log_nfa_new = rect_nfa(r);
- if(log_nfa_new > log_nfa)
- {
- rec = rect(r);
- log_nfa = log_nfa_new;
- }
- }
- }
- if(log_nfa > LOG_EPS) return log_nfa;
- // Try to reduce one side of rectangle
- r = rect(rec);
- for(unsigned int n = 0; n < 5; ++n)
- {
- if((r.width - delta) >= 0.5)
- {
- r.x1 += -r.dy * delta_2;
- r.y1 += r.dx * delta_2;
- r.x2 += -r.dy * delta_2;
- r.y2 += r.dx * delta_2;
- r.width -= delta;
- double log_nfa_new = rect_nfa(r);
- if(log_nfa_new > log_nfa)
- {
- rec = rect(r);
- log_nfa = log_nfa_new;
- }
- }
- }
- if(log_nfa > LOG_EPS) return log_nfa;
- // Try to reduce other side of rectangle
- r = rect(rec);
- for(unsigned int n = 0; n < 5; ++n)
- {
- if((r.width - delta) >= 0.5)
- {
- r.x1 -= -r.dy * delta_2;
- r.y1 -= r.dx * delta_2;
- r.x2 -= -r.dy * delta_2;
- r.y2 -= r.dx * delta_2;
- r.width -= delta;
- double log_nfa_new = rect_nfa(r);
- if(log_nfa_new > log_nfa)
- {
- rec = rect(r);
- log_nfa = log_nfa_new;
- }
- }
- }
- if(log_nfa > LOG_EPS) return log_nfa;
- // Try finer precision
- r = rect(rec);
- for(unsigned int n = 0; n < 5; ++n)
- {
- if((r.width - delta) >= 0.5)
- {
- r.p /= 2;
- r.prec = r.p * CV_PI;
- double log_nfa_new = rect_nfa(r);
- if(log_nfa_new > log_nfa)
- {
- rec = rect(r);
- log_nfa = log_nfa_new;
- }
- }
- }
- return log_nfa;
- }
- double myLineSegmentDetectorImpl::rect_nfa(const rect& rec) const
- {
- int total_pts = 0, alg_pts = 0;
- double half_width = rec.width / 2.0;
- double dyhw = rec.dy * half_width;
- double dxhw = rec.dx * half_width;
- edge ordered_x[4];
- edge* min_y = &ordered_x[0];
- edge* max_y = &ordered_x[0]; // Will be used for loop range
- ordered_x[0].p.x = int(rec.x1 - dyhw); ordered_x[0].p.y = int(rec.y1 + dxhw); ordered_x[0].taken = false;
- ordered_x[1].p.x = int(rec.x2 - dyhw); ordered_x[1].p.y = int(rec.y2 + dxhw); ordered_x[1].taken = false;
- ordered_x[2].p.x = int(rec.x2 + dyhw); ordered_x[2].p.y = int(rec.y2 - dxhw); ordered_x[2].taken = false;
- ordered_x[3].p.x = int(rec.x1 + dyhw); ordered_x[3].p.y = int(rec.y1 - dxhw); ordered_x[3].taken = false;
- std::sort(ordered_x, ordered_x + 4, AsmallerB_XoverY);
- // Find min y. And mark as taken. find max y.
- for(unsigned int i = 1; i < 4; ++i)
- {
- if(min_y->p.y > ordered_x[i].p.y) {min_y = &ordered_x[i]; }
- if(max_y->p.y < ordered_x[i].p.y) {max_y = &ordered_x[i]; }
- }
- min_y->taken = true;
- // Find leftmost untaken point;
- edge* leftmost = 0;
- for(unsigned int i = 0; i < 4; ++i)
- {
- if(!ordered_x[i].taken)
- {
- if(!leftmost) // if uninitialized
- {
- leftmost = &ordered_x[i];
- }
- else if (leftmost->p.x > ordered_x[i].p.x)
- {
- leftmost = &ordered_x[i];
- }
- }
- }
- CV_Assert(leftmost != NULL);
- leftmost->taken = true;
- // Find rightmost untaken point;
- edge* rightmost = 0;
- for(unsigned int i = 0; i < 4; ++i)
- {
- if(!ordered_x[i].taken)
- {
- if(!rightmost) // if uninitialized
- {
- rightmost = &ordered_x[i];
- }
- else if (rightmost->p.x < ordered_x[i].p.x)
- {
- rightmost = &ordered_x[i];
- }
- }
- }
- CV_Assert(rightmost != NULL);
- rightmost->taken = true;
- // Find last untaken point;
- edge* tailp = 0;
- for(unsigned int i = 0; i < 4; ++i)
- {
- if(!ordered_x[i].taken)
- {
- if(!tailp) // if uninitialized
- {
- tailp = &ordered_x[i];
- }
- else if (tailp->p.x > ordered_x[i].p.x)
- {
- tailp = &ordered_x[i];
- }
- }
- }
- CV_Assert(tailp != NULL);
- tailp->taken = true;
- double flstep = (min_y->p.y != leftmost->p.y) ?
- (min_y->p.x - leftmost->p.x) / (min_y->p.y - leftmost->p.y) : 0; //first left step
- double slstep = (leftmost->p.y != tailp->p.x) ?
- (leftmost->p.x - tailp->p.x) / (leftmost->p.y - tailp->p.x) : 0; //second left step
- double frstep = (min_y->p.y != rightmost->p.y) ?
- (min_y->p.x - rightmost->p.x) / (min_y->p.y - rightmost->p.y) : 0; //first right step
- double srstep = (rightmost->p.y != tailp->p.x) ?
- (rightmost->p.x - tailp->p.x) / (rightmost->p.y - tailp->p.x) : 0; //second right step
- double lstep = flstep, rstep = frstep;
- double left_x = min_y->p.x, right_x = min_y->p.x;
- // Loop around all points in the region and count those that are aligned.
- int min_iter = min_y->p.y;
- int max_iter = max_y->p.y;
- for(int y = min_iter; y <= max_iter; ++y)
- {
- if (y < 0 || y >= img_height) continue;
- for(int x = int(left_x); x <= int(right_x); ++x)
- {
- if (x < 0 || x >= img_width) continue;
- ++total_pts;
- if(isAligned(x, y, rec.theta, rec.prec))
- {
- ++alg_pts;
- }
- }
- if(y >= leftmost->p.y) { lstep = slstep; }
- if(y >= rightmost->p.y) { rstep = srstep; }
- left_x += lstep;
- right_x += rstep;
- }
- return nfa(total_pts, alg_pts, rec.p);
- }
- double myLineSegmentDetectorImpl::nfa(const int& n, const int& k, const double& p) const
- {
- // Trivial cases
- if(n == 0 || k == 0) { return -LOG_NT; }
- if(n == k) { return -LOG_NT - double(n) * log10(p); }
- double p_term = p / (1 - p);
- double log1term = (double(n) + 1) - log_gamma(double(k) + 1)
- - log_gamma(double(n-k) + 1)
- + double(k) * log(p) + double(n-k) * log(1.0 - p);
- double term = exp(log1term);
- if(double_equal(term, 0))
- {
- if(k > n * p) return -log1term / M_LN10 - LOG_NT;
- else return -LOG_NT;
- }
- // Compute more terms if needed
- double bin_tail = term;
- double tolerance = 0.1; // an error of 10% in the result is accepted
- for(int i = k + 1; i <= n; ++i)
- {
- double bin_term = double(n - i + 1) / double(i);
- double mult_term = bin_term * p_term;
- term *= mult_term;
- bin_tail += term;
- if(bin_term < 1)
- {
- double err = term * ((1 - pow(mult_term, double(n-i+1))) / (1 - mult_term) - 1);
- if(err < tolerance * fabs(-log10(bin_tail) - LOG_NT) * bin_tail) break;
- }
- }
- return -log10(bin_tail) - LOG_NT;
- }
- inline bool myLineSegmentDetectorImpl::isAligned(int x, int y, const double& theta, const double& prec) const
- {
- if(x < 0 || y < 0 || x >= angles.cols || y >= angles.rows) { return false; }
- const double& a = angles.at<double>(y, x);
- if(a == NOTDEF) { return false; }
- // It is assumed that 'theta' and 'a' are in the range [-pi,pi]
- double n_theta = theta - a;
- if(n_theta < 0) { n_theta = -n_theta; }
- if(n_theta > M_3_2_PI)
- {
- n_theta -= M_2__PI;
- if(n_theta < 0) n_theta = -n_theta;
- }
- return n_theta <= prec;
- }
- } // namespace cv
在LSDDetector_custom.cpp文件中引用头文件
#include "my_lsd.hpp"再次编译运行
四、运行
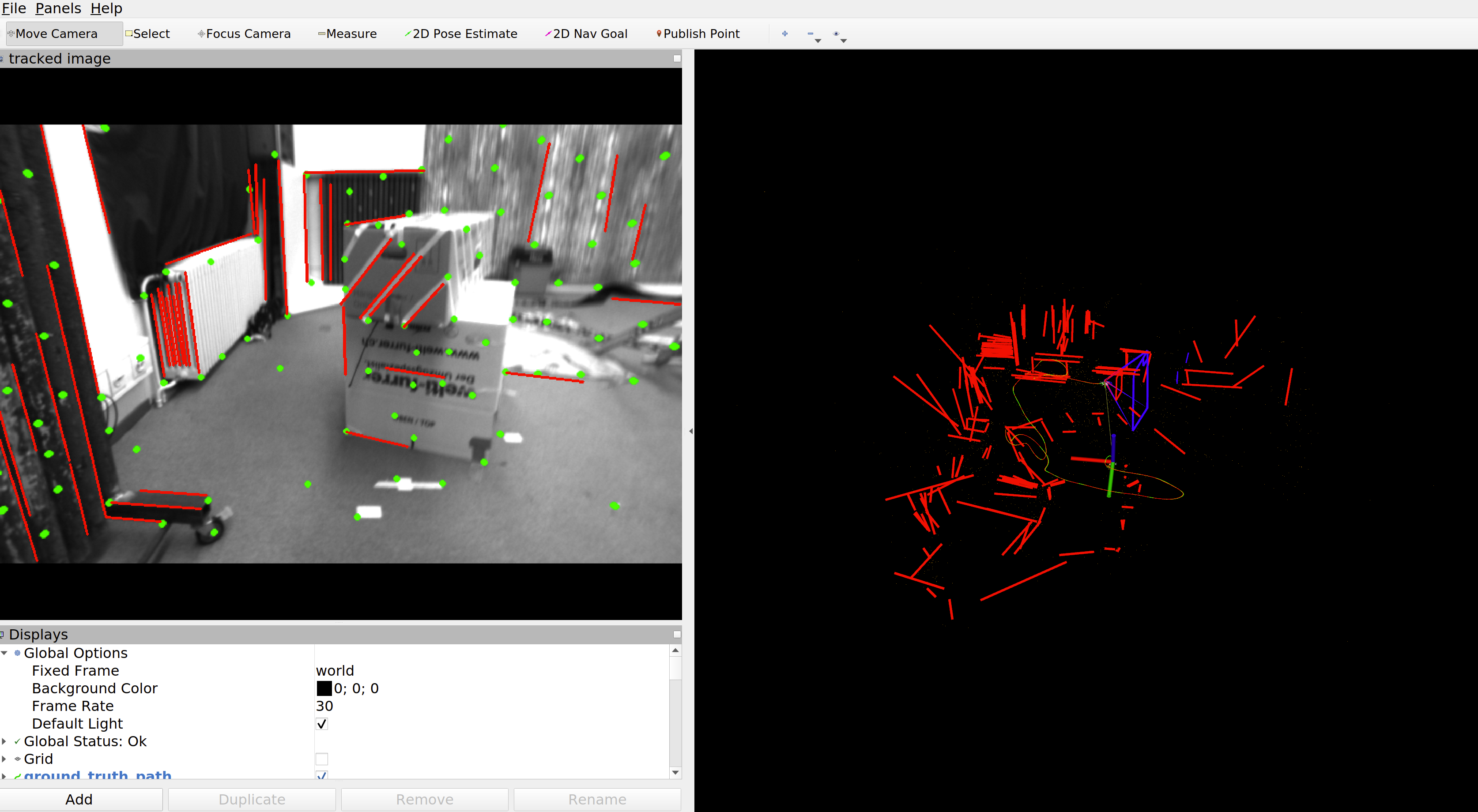
- source devel/setup.bash
- roslaunch plvins_estimator plvins_show_linepoint.launch
- rosbag play MH_05_difficult.bag
注意:我们此时需要需要将src/PL-VINSvins_estimator/launch/下的plvins-show-linepoint.launch改为plvins_show_linepoint.launch(注意是下划线)文件名
数据集下载地址如下:
kmavvisualinertialdatasets – ASL Datasets
博主github仓库中的代码全部都修改完毕,适用ubuntu20.04 opencv4
-
相关阅读:
HTTP图解基础知识
c# winform 实际操作XML代码,包括创建、保存、查询、删除窗体演示
正则表达式
Pycharm 远程连接服务器(ssh)运行深度学习代码 | 详细步骤
Web3 的通行证——DID 带来数字身份革命
【Hello Algorithm】暴力递归到动态规划(一)
controller接收List入参
Apollo配置中心-手把手教你搭建Apollo配置中心运行环境
【logrotate】linux定时文件切割(解决openresty单个日志文件过大问题)
关于打印输出
- 原文地址:https://blog.csdn.net/HUASHUDEYANJING/article/details/134254818