-
机器人系统 ROS 常用命令行工具
1. 启动ros 主节点 roscore
roscore- 1
运行成功如图:

1.1 rosrun 启动服务节点
例子:启动一个小乌龟节点
rosrun turtlesim turtlesim_node- 1
运行结果如图:

1.2 启动键盘控制
打开新的命令窗口,启动turtle_teleop_key 节点
rosrun turtlesim turtle_teleop_key- 1
运行结果:

2. 显示系统中所有与话题相关消息的指令rostopic
rostopic- 1
列出rostopic 所有的命令列表,如下图

我们先看下 list 列出所有当前在用的消息列表,可以看到,只有两个2.1 打印出当前所有服务的列表
roctopic list- 1

2.2 rostopic pub 话题名 话题消息类型 话题消息内容 #向话题发布内容 输入话题名后可以使用Tab补齐
例子: 让小乌龟动起来
小技巧:输入命令的时候可按 Tab 建将命令自动补全,将消息类型补全后可双击 Tab 建将消息补全
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear: x: 2.0 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 0.0"- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
运行效果自己查看:

2.3rostopic pub -r 频率 话题名 话题消息类型 话题消息内容 #-r:信号发布 频率:一分钟发布的次数
2.4 rostopic type 查看消息的类型
例子:
rostopic tyle /turtle1/cmd_vel- 1

3.rosservice:显示系统中所有与服务相关消息的指令
同样的先看下 rosservice 下所有的命令列表
rosservice- 1

3.1 打印出当前所有服务的列表rosservice list
rosservice list- 1

3.2 rosservice call 服务名 服务内容 #调用服务
例子: 清除小乌龟运行轨迹
rosservice call clean- 1

4. rosnode:显示系统中所有与节点相关消息的指令
rosnode- 1

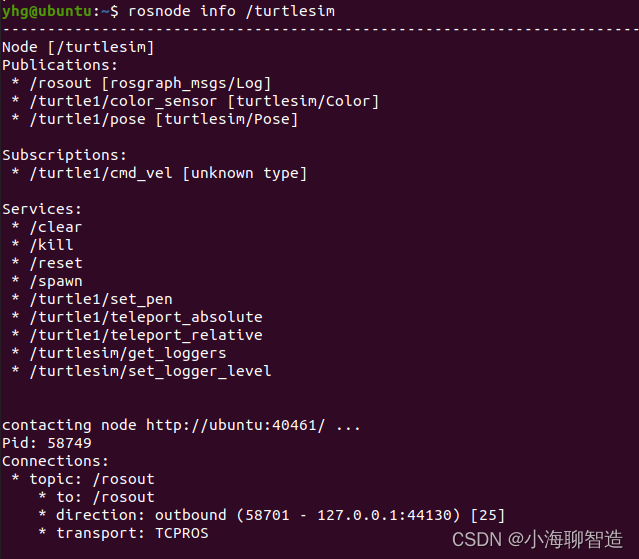
###4.1 rosnode info /xxx #查看xxx节点信息
例子: 查看小乌龟节点信息
rosnode turtlesim turtlesim_node- 1
运行结果如下图:
5 .rosmsg:显示系统中所有与消息相关消息的指令
5.1 rosmsg show xxx #显示xxx的数据结构
6.rosparam::显示系统中所有与参数相关消息的指令
6.1 rosparam list #列出当前所有参数
rosparam list- 1
运行结果如下:

6.2 rosparam get xxx #显示某个参数值
6.2.1 显示服务上所有参数内容
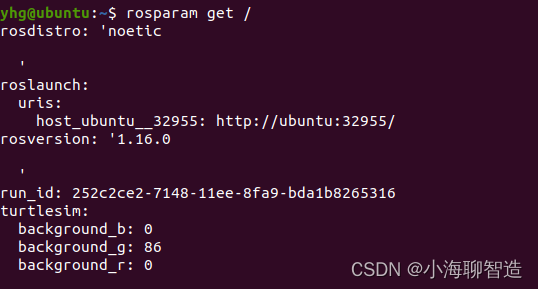
6.2.2例子:设置小乌龟节点窗口的颜色
R(红)G(绿)B(蓝)这三原色

6.3 rosparam set xxx #设置某个参数值
例子:设置小乌龟节点窗口的颜色为绿色
rosparam set /turtlesim/background_r 0- 1
rosparam set /turtlesim/background_b 0- 1
rosservice call clear- 1

rosservice call clear 促使上面的修改生效
6.4 rosparam dump xxx.xxx #保存参数到文件
6.4.1 例子:将所有参数写入到文件中
rosparam dump params.yaml- 1
6.5 rosparam load xxx.xxx #从文件读取参数
6.5.1例子:将参数文件导入到服务中
rosparam load params.yaml namespace- 1
6.6 rosparam delete xxx #删除参数
7 .rqt_graph:用图形表示当前活动中的节点与在ROS网络上传输的消息之间的相关性的工具

-
相关阅读:
[1007]魔法少女小Scarlet
多线程编程
百亿级访问量,如何做缓存架构设计
《C++代码简洁之道》学习笔记:类的设计原则
[二进制漏洞]栈(Stack)溢出漏洞 Linux篇
900ES1-0100 honeywell 可减少视觉引导应用的整体开发时间
网页中使用特殊字体
责任链模式(Chain Of Responsibility)
xCode14.3.1运行MonkeyDev出现“Executable Not Found“的解决办法
第五章. 可视化数据分析分析图表—图表的常用设置2
- 原文地址:https://blog.csdn.net/hai411741962/article/details/133983134