-
Aocoda-RC F405V2 FC(STM32F405RGT6 v.s. AT32F435RGT7) IO Definitions
@[TOC](Aocoda-RC F405V2 FC(STM32F405RGT6 v.s. AT32F435RGT7) IO Definitions)
1. 源由
Aocoda-RC F405V2飞控支持betaflight/inav/Ardupilot固件,是一款固件兼容性非常不错的开源硬件。
之前我们对比过STM32F405RGT6 v.s. AT32F435RGT7 Comparison for Flight Controller,整体对比:
- 性能上显著提升
- 引脚定义基本一致
- 容量上最大支持4MB
通过betaflight开源,可以非常快速的了解硬件的引脚对应关系:
若将该芯片直接替换成AT32F435RGT7,在硬件升级上需要做哪些改动或者调整/优化?
2. 功能引脚对比
STM32F405RGT6飞控引脚连线参考图:

2.1 SPI
2.1.1 Gyro
#define GYRO_1_CS_PIN PA4 #define SPI1_SCK_PIN PA5 #define SPI1_SDI_PIN PA6 #define SPI1_SDO_PIN PA7 #define GYRO_1_EXTI_PIN PC4- 1
- 2
- 3
- 4
- 5
- 6


2.1.2 OSD
#define MAX7456_SPI_CS_PIN PA13 #define SPI2_SCK_PIN PB13 #define SPI2_SDI_PIN PB14 #define SPI2_SDO_PIN PB15- 1
- 2
- 3
- 4


2.1.3 Flash
#define FLASH_CS_PIN PC0 #define SPI3_SCK_PIN PB3 #define SPI3_SDI_PIN PB4 #define SPI3_SDO_PIN PB5- 1
- 2
- 3
- 4


2.2 I2C
#define I2C1_SCL_PIN PB6 #define I2C1_SDA_PIN PB7- 1
- 2


2.3 USB
#define USB_DETECT_PIN PB12- 1

2.4 UART
# The normal usage of this ordering is: # 1) SERIAL0: console (primary mavlink, usually USB) # 2) SERIAL1: GPS # 3) SERIAL2: RC input # 4) SERIAL3: ESC Telemetry # 5) SERIAL4: VTX # 6) SERIAL5: Telemetry- 1
- 2
- 3
- 4
- 5
- 6
- 7
2.4.1 UART1
#define UART1_TX_PIN PA9 #define UART1_RX_PIN PA10- 1
- 2

2.4.2 UART2
#define UART2_TX_PIN PA2 #define UART2_RX_PIN PA3- 1
- 2

注:PA3有定时器资源,可用于单线协议。
2.4.3 UART3
#define UART3_TX_PIN PC10 #define UART3_RX_PIN PC11- 1
- 2

2.4.4 UART4
#define UART4_TX_PIN PA0 #define UART4_RX_PIN PA1- 1
- 2

2.4.5 UART5
#define UART5_TX_PIN PC12 #define UART5_RX_PIN PD2- 1
- 2


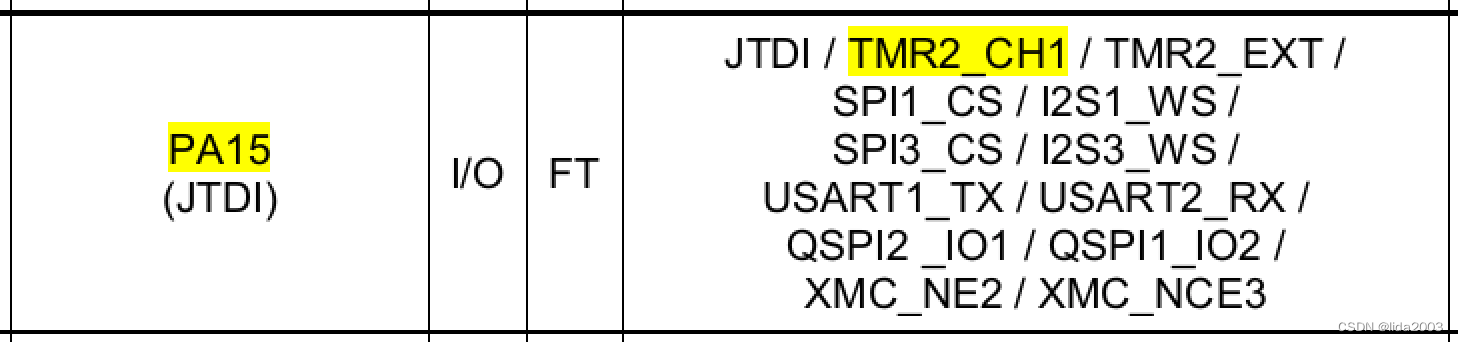
2.5 Motor
#define MOTOR1_PIN PC6 #define MOTOR2_PIN PC7 #define MOTOR3_PIN PC8 #define MOTOR4_PIN PC9 #define MOTOR5_PIN PA15 #define MOTOR6_PIN PA8 #define MOTOR7_PIN PB10 #define MOTOR8_PIN PB11 TIMER_PIN_MAP( 1, PC6 , 2, 1) \ TIMER_PIN_MAP( 2, PC7 , 2, 1) \ TIMER_PIN_MAP( 3, PC8 , 2, 1) \ TIMER_PIN_MAP( 4, PC9 , 2, 0) \ TIMER_PIN_MAP( 5, PA15, 1, 0) \ TIMER_PIN_MAP( 6, PA8 , 1, 1) \ TIMER_PIN_MAP( 7, PB10, 1, 0) \ TIMER_PIN_MAP( 8, PB11, 1, 0) \- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17


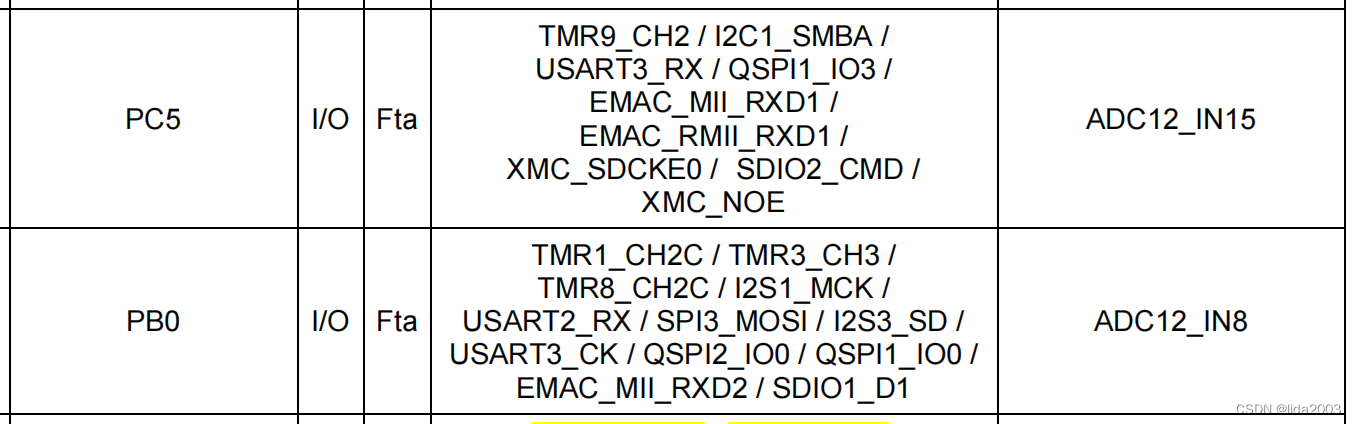
2.6 ADC
#define ADC_VBAT_PIN PC2 #define ADC_RSSI_PIN PC3 #define ADC_CURR_PIN PC1- 1
- 2
- 3

2.7 LED & LED stripe
2.7.1 LED
#define LED0_PIN PC13- 1

2.7.2 LED stripe
#define LED_STRIP_PIN PB1 TIMER_PIN_MAP( 9, PB1 , 2, 0)- 1
- 2
- 3

2.8 Buzzer
#define BEEPER_PIN PB8- 1

3. 总结
3.1 电气特性差异
-
STM32F405RGT6 : VCAP_1/VCAP_2

-
AT32F435RGT7: PH3/PH2

3.2 功能引脚差异
基本一致。
3.3 未使用功能引脚






4. 参考资料
【1】STM32F405/415
【2】AT32F435 Series
【3】STM32F405RGT6 v.s. AT32F435RGT7 Comparison for Flight Controller -
相关阅读:
[Unity][VR]Oculus透视开发图文教程1-Passthrough应用XR项目设置
结构建模设计——Solidworks软件之特征成型中异形孔向导和线性阵列功能实战总结
垂直行业大模型“封神”背后,AI数据服务走入“深水区”
【音视频】ffplay源码解析-FrameQueue队列
阿里为何禁止在对象中使用基本数据类型
Java8流示例
多模态模型
IP地址介绍
kafka 3.0 离线安装
通过Docker新建并使用MySQL数据库
- 原文地址:https://blog.csdn.net/lida2003/article/details/133960999
