-
轻量级超分网络:Edge-oriented Convolution Block for Real-timeMM21_ECBSR 和 eSR
ECBSR(Edge-oriented Convolution Block for Real-timeMM21_ECBSR)
1. 作者目的是开发一个高效的适合移动端的超分网络。
多分支结构,以及dense connections 可以丰富特征提取和表示, 虽然不会引入太多 FLOPs, 但是会牺牲并行化速度,以及受到DDR 低带宽的影响。
另外一些 delite conv等其他卷积方法也有被提出来提高 网络性能,但是在GPU,NPU上可能没有被很好的优化。
因此作者计划 使用平坦 的网络结构 和 常规的卷积方法。
2. 作者决定使用plain net ,但是效果不好,因此利用重参数化方法,丰富特征表示。
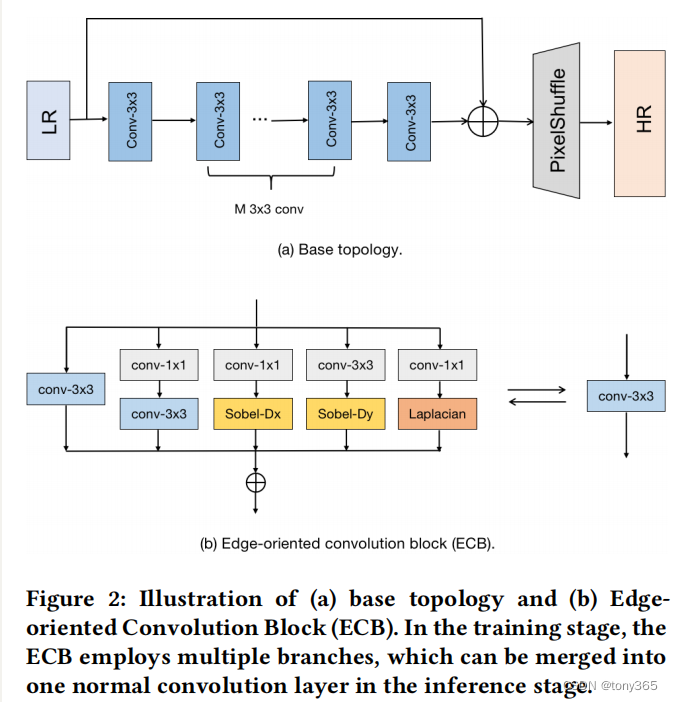
主要结构如下图所示,
-
一个单独的conv-3x3
-
conv-1x1 + conv-3x3: expanding-and-squeezing
-
conv-1x1 + sobelx
-
conv-1x1 + sobely(图中和代码不一致)

-
conv-1x1 + laplasian 显示提取图像的边缘特征

训练的时候网络右五个分支组成,在inference的时候可以利用re-parameteize技术合并为一个conv-3x3,这样推理的速度和效率都得到提高,精度基本上没有损失。
3. re-parameterization for efficient inference
整体网络结构:ecb模块 和 一个pixel shuffle
## parameters for ecbsr scale: 2 colors: 1 m_ecbsr: 4 c_ecbsr: 16 idt_ecbsr: 0 act_type: 'prelu' pretrain: null 1 + 4 个 conv 1 个 pixel shuffle class ECBSR(nn.Module): def __init__(self, module_nums, channel_nums, with_idt, act_type, scale, colors): super(ECBSR, self).__init__() self.module_nums = module_nums self.channel_nums = channel_nums self.scale = scale self.colors = colors self.with_idt = with_idt self.act_type = act_type self.backbone = None self.upsampler = None backbone = [] backbone += [ECB(self.colors, self.channel_nums, depth_multiplier=2.0, act_type=self.act_type, with_idt = self.with_idt)] for i in range(self.module_nums): backbone += [ECB(self.channel_nums, self.channel_nums, depth_multiplier=2.0, act_type=self.act_type, with_idt = self.with_idt)] backbone += [ECB(self.channel_nums, self.colors*self.scale*self.scale, depth_multiplier=2.0, act_type='linear', with_idt = self.with_idt)] self.backbone = nn.Sequential(*backbone) self.upsampler = nn.PixelShuffle(self.scale) def forward(self, x): y = self.backbone(x) + x y = self.upsampler(y) return y- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
ecb模块:包括五个卷积分支的定义
class ECB(nn.Module): def __init__(self, inp_planes, out_planes, depth_multiplier, act_type='prelu', with_idt = False): super(ECB, self).__init__() self.depth_multiplier = depth_multiplier self.inp_planes = inp_planes self.out_planes = out_planes self.act_type = act_type if with_idt and (self.inp_planes == self.out_planes): self.with_idt = True else: self.with_idt = False self.conv3x3 = torch.nn.Conv2d(self.inp_planes, self.out_planes, kernel_size=3, padding=1) self.conv1x1_3x3 = SeqConv3x3('conv1x1-conv3x3', self.inp_planes, self.out_planes, self.depth_multiplier) self.conv1x1_sbx = SeqConv3x3('conv1x1-sobelx', self.inp_planes, self.out_planes, -1) self.conv1x1_sby = SeqConv3x3('conv1x1-sobely', self.inp_planes, self.out_planes, -1) self.conv1x1_lpl = SeqConv3x3('conv1x1-laplacian', self.inp_planes, self.out_planes, -1) if self.act_type == 'prelu': self.act = nn.PReLU(num_parameters=self.out_planes) elif self.act_type == 'relu': self.act = nn.ReLU(inplace=True) elif self.act_type == 'rrelu': self.act = nn.RReLU(lower=-0.05, upper=0.05) elif self.act_type == 'softplus': self.act = nn.Softplus() elif self.act_type == 'linear': pass else: raise ValueError('The type of activation if not support!') def forward(self, x): if self.training: y = self.conv3x3(x) + \ self.conv1x1_3x3(x) + \ self.conv1x1_sbx(x) + \ self.conv1x1_sby(x) + \ self.conv1x1_lpl(x) if self.with_idt: y += x else: RK, RB = self.rep_params() y = F.conv2d(input=x, weight=RK, bias=RB, stride=1, padding=1) if self.act_type != 'linear': y = self.act(y) return y def rep_params(self): K0, B0 = self.conv3x3.weight, self.conv3x3.bias K1, B1 = self.conv1x1_3x3.rep_params() K2, B2 = self.conv1x1_sbx.rep_params() K3, B3 = self.conv1x1_sby.rep_params() K4, B4 = self.conv1x1_lpl.rep_params() RK, RB = (K0+K1+K2+K3+K4), (B0+B1+B2+B3+B4) if self.with_idt: device = RK.get_device() if device < 0: device = None K_idt = torch.zeros(self.out_planes, self.out_planes, 3, 3, device=device) for i in range(self.out_planes): K_idt[i, i, 1, 1] = 1.0 B_idt = 0.0 RK, RB = RK + K_idt, RB + B_idt return RK, RB- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
关于重参数化具体实现
class SeqConv3x3(nn.Module): def __init__(self, seq_type, inp_planes, out_planes, depth_multiplier): super(SeqConv3x3, self).__init__() self.type = seq_type self.inp_planes = inp_planes self.out_planes = out_planes if self.type == 'conv1x1-conv3x3': self.mid_planes = int(out_planes * depth_multiplier) conv0 = torch.nn.Conv2d(self.inp_planes, self.mid_planes, kernel_size=1, padding=0) self.k0 = conv0.weight self.b0 = conv0.bias conv1 = torch.nn.Conv2d(self.mid_planes, self.out_planes, kernel_size=3) self.k1 = conv1.weight self.b1 = conv1.bias elif self.type == 'conv1x1-sobelx': conv0 = torch.nn.Conv2d(self.inp_planes, self.out_planes, kernel_size=1, padding=0) self.k0 = conv0.weight self.b0 = conv0.bias # init scale & bias scale = torch.randn(size=(self.out_planes, 1, 1, 1)) * 1e-3 self.scale = nn.Parameter(scale) # bias = 0.0 # bias = [bias for c in range(self.out_planes)] # bias = torch.FloatTensor(bias) bias = torch.randn(self.out_planes) * 1e-3 bias = torch.reshape(bias, (self.out_planes,)) self.bias = nn.Parameter(bias) # init mask self.mask = torch.zeros((self.out_planes, 1, 3, 3), dtype=torch.float32) for i in range(self.out_planes): self.mask[i, 0, 0, 0] = 1.0 self.mask[i, 0, 1, 0] = 2.0 self.mask[i, 0, 2, 0] = 1.0 self.mask[i, 0, 0, 2] = -1.0 self.mask[i, 0, 1, 2] = -2.0 self.mask[i, 0, 2, 2] = -1.0 self.mask = nn.Parameter(data=self.mask, requires_grad=False) elif self.type == 'conv1x1-sobely': conv0 = torch.nn.Conv2d(self.inp_planes, self.out_planes, kernel_size=1, padding=0) self.k0 = conv0.weight self.b0 = conv0.bias # init scale & bias scale = torch.randn(size=(self.out_planes, 1, 1, 1)) * 1e-3 self.scale = nn.Parameter(torch.FloatTensor(scale)) # bias = 0.0 # bias = [bias for c in range(self.out_planes)] # bias = torch.FloatTensor(bias) bias = torch.randn(self.out_planes) * 1e-3 bias = torch.reshape(bias, (self.out_planes,)) self.bias = nn.Parameter(torch.FloatTensor(bias)) # init mask self.mask = torch.zeros((self.out_planes, 1, 3, 3), dtype=torch.float32) for i in range(self.out_planes): self.mask[i, 0, 0, 0] = 1.0 self.mask[i, 0, 0, 1] = 2.0 self.mask[i, 0, 0, 2] = 1.0 self.mask[i, 0, 2, 0] = -1.0 self.mask[i, 0, 2, 1] = -2.0 self.mask[i, 0, 2, 2] = -1.0 self.mask = nn.Parameter(data=self.mask, requires_grad=False) elif self.type == 'conv1x1-laplacian': conv0 = torch.nn.Conv2d(self.inp_planes, self.out_planes, kernel_size=1, padding=0) self.k0 = conv0.weight self.b0 = conv0.bias # init scale & bias scale = torch.randn(size=(self.out_planes, 1, 1, 1)) * 1e-3 self.scale = nn.Parameter(torch.FloatTensor(scale)) # bias = 0.0 # bias = [bias for c in range(self.out_planes)] # bias = torch.FloatTensor(bias) bias = torch.randn(self.out_planes) * 1e-3 bias = torch.reshape(bias, (self.out_planes,)) self.bias = nn.Parameter(torch.FloatTensor(bias)) # init mask self.mask = torch.zeros((self.out_planes, 1, 3, 3), dtype=torch.float32) for i in range(self.out_planes): self.mask[i, 0, 0, 1] = 1.0 self.mask[i, 0, 1, 0] = 1.0 self.mask[i, 0, 1, 2] = 1.0 self.mask[i, 0, 2, 1] = 1.0 self.mask[i, 0, 1, 1] = -4.0 self.mask = nn.Parameter(data=self.mask, requires_grad=False) else: raise ValueError('the type of seqconv is not supported!') def forward(self, x): if self.type == 'conv1x1-conv3x3': # conv-1x1 y0 = F.conv2d(input=x, weight=self.k0, bias=self.b0, stride=1) # explicitly padding with bias y0 = F.pad(y0, (1, 1, 1, 1), 'constant', 0) b0_pad = self.b0.view(1, -1, 1, 1) y0[:, :, 0:1, :] = b0_pad y0[:, :, -1:, :] = b0_pad y0[:, :, :, 0:1] = b0_pad y0[:, :, :, -1:] = b0_pad # conv-3x3 y1 = F.conv2d(input=y0, weight=self.k1, bias=self.b1, stride=1) else: y0 = F.conv2d(input=x, weight=self.k0, bias=self.b0, stride=1) # explicitly padding with bias y0 = F.pad(y0, (1, 1, 1, 1), 'constant', 0) b0_pad = self.b0.view(1, -1, 1, 1) y0[:, :, 0:1, :] = b0_pad y0[:, :, -1:, :] = b0_pad y0[:, :, :, 0:1] = b0_pad y0[:, :, :, -1:] = b0_pad # conv-3x3 y1 = F.conv2d(input=y0, weight=self.scale * self.mask, bias=self.bias, stride=1, groups=self.out_planes) return y1 def rep_params(self): device = self.k0.get_device() if device < 0: device = None if self.type == 'conv1x1-conv3x3': # re-param conv kernel RK = F.conv2d(input=self.k1, weight=self.k0.permute(1, 0, 2, 3)) # re-param conv bias RB = torch.ones(1, self.mid_planes, 3, 3, device=device) * self.b0.view(1, -1, 1, 1) RB = F.conv2d(input=RB, weight=self.k1).view(-1,) + self.b1 else: tmp = self.scale * self.mask k1 = torch.zeros((self.out_planes, self.out_planes, 3, 3), device=device) for i in range(self.out_planes): k1[i, i, :, :] = tmp[i, 0, :, :] b1 = self.bias # re-param conv kernel RK = F.conv2d(input=k1, weight=self.k0.permute(1, 0, 2, 3)) # re-param conv bias RB = torch.ones(1, self.out_planes, 3, 3, device=device) * self.b0.view(1, -1, 1, 1) RB = F.conv2d(input=RB, weight=k1).view(-1,) + b1 return RK, RB- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
4. 结果

edge-SR
1.转置卷积上采样 和 pixel shuffle的区别

2.pooling or downsample 可能有aliasing artifacts
using an anti–aliasing low–pass filter and then downsamples the image.
This process is implemented in tensor processing frameworks with strided convolutional
layers where the kernel or weight parameters correspond to the low–pass filter coefficients.3.单层网络eSR-MAX
一个卷积,一个pixel shuffle, 一个max
卷积输出的通道数: sxsxchannelout_channels=self.stride[0]*self.stride[1]*self.channels,- 1

4.eSR-TM, eSR-TR, eSR-CNN
直接看代码更好理解:
class edgeSR_TM(nn.Module): def __init__(self, model_id): self.model_id = model_id super().__init__() assert self.model_id.startswith('eSR-TM_') parse = self.model_id.split('_') self.channels = int([s for s in parse if s.startswith('C')][0][1:]) self.kernel_size = (int([s for s in parse if s.startswith('K')][0][1:]), ) * 2 self.stride = (int([s for s in parse if s.startswith('s')][0][1:]), ) * 2 self.pixel_shuffle = nn.PixelShuffle(self.stride[0]) self.softmax = nn.Softmax(dim=1) self.filter = nn.Conv2d( in_channels=1, out_channels=2*self.stride[0]*self.stride[1]*self.channels, kernel_size=self.kernel_size, stride=1, padding=( (self.kernel_size[0]-1)//2, (self.kernel_size[1]-1)//2 ), groups=1, bias=False, dilation=1 ) nn.init.xavier_normal_(self.filter.weight, gain=1.) self.filter.weight.data[:, 0, self.kernel_size[0]//2, self.kernel_size[0]//2] = 1. def forward(self, input): filtered = self.pixel_shuffle(self.filter(input)) value, key = torch.split(filtered, [self.channels, self.channels], dim=1) return torch.sum( value * self.softmax(key), dim=1, keepdim=True ) class edgeSR_TR(nn.Module): def __init__(self, model_id): self.model_id = model_id super().__init__() assert self.model_id.startswith('eSR-TR_') parse = self.model_id.split('_') self.channels = int([s for s in parse if s.startswith('C')][0][1:]) self.kernel_size = (int([s for s in parse if s.startswith('K')][0][1:]), ) * 2 self.stride = (int([s for s in parse if s.startswith('s')][0][1:]), ) * 2 self.pixel_shuffle = nn.PixelShuffle(self.stride[0]) self.softmax = nn.Softmax(dim=1) self.filter = nn.Conv2d( in_channels=1, out_channels=3*self.stride[0]*self.stride[1]*self.channels, kernel_size=self.kernel_size, stride=1, padding=( (self.kernel_size[0]-1)//2, (self.kernel_size[1]-1)//2 ), groups=1, bias=False, dilation=1 ) nn.init.xavier_normal_(self.filter.weight, gain=1.) self.filter.weight.data[:, 0, self.kernel_size[0]//2, self.kernel_size[0]//2] = 1. def forward(self, input): filtered = self.pixel_shuffle(self.filter(input)) value, query, key = torch.split(filtered, [self.channels, self.channels, self.channels], dim=1) return torch.sum( value * self.softmax(query*key), dim=1, keepdim=True )- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
-
-
相关阅读:
linux搭建单机ES,集成ik分词器,文本抽取,Kibana可视化平台
亚远景科技-如何应对汽车软件开发中质量与速度的冲突带来的挑战?
Unity UI锚点和位置关系
JQuery表单验证(validate):常用例子介绍
Pandas常用操作命令(六)——数据分组groupby
创维E900V22C、E900V22D_线刷固件和卡刷固件及教程
“仿RabbitMQ实现消息队列”---整体架构与模块说明
Cannot read properties of null (reading ‘insertBefore‘)
智能汽车-大数据标签系统应用浅谈
深耕业财一体化,激活企业全面预算管理新动能
- 原文地址:https://blog.csdn.net/tywwwww/article/details/133906466
