-
【Proteus仿真】【51单片机】水箱液位监控系统
一、功能简介
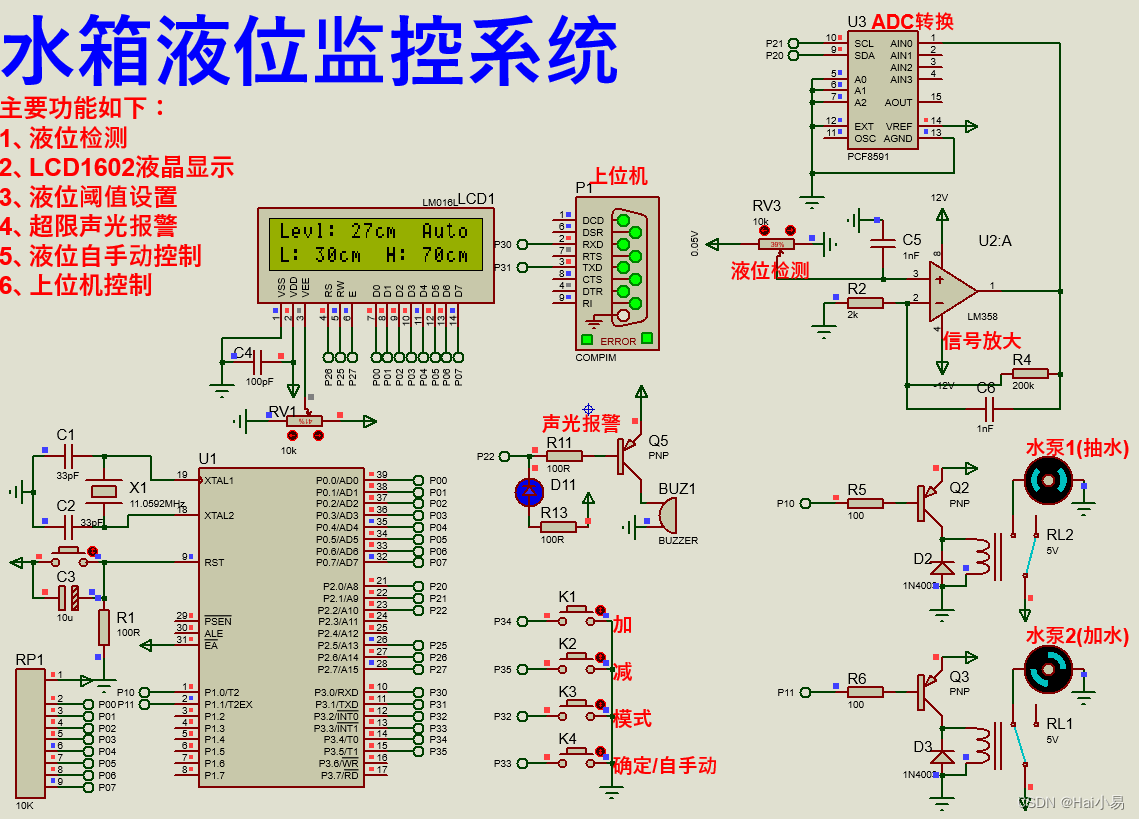
本项目使用Proteus8仿真51单片机控制器,使用LCD1602液晶、按键、蜂鸣器、液位传感器、PCF8591 ADC转换器、水泵等。
主要功能:
系统运行后,LCD1602显示当前水位、上下限阈值和工作模式,系统默认处于自动模式。若检测水位高于上限,声光报警,开启抽水。若检测水位低于下限,声光报警,开启加水。可操作K4键切换为手动模式,然后通过K1/K2键开启加水和开启抽水。再次按下K4键回到自动模式。若要修改上下限阈值,可通过K3键进入上下限设置,光标定位修改的值,K1和K2进行加减。还可通过串口助手进行参数修改和模式切换,指令(十六进制)如下:
加–>01
减–>02
模式–>03
确定/自手动–>04
二、软件设计
/* 作者:嗨小易(QQ:3443792007) */ //系统数据显示 void sys_data_show(void) { while(1) { //显示当前液位 lcd1602_show_nums(5,0,sys_ctrl.level,3,0); //液位阈值显示 lcd1602_show_nums(2,1,sys_ctrl.levell,3,0); lcd1602_show_nums(11,1,sys_ctrl.levelh,3,0); //自动手动模式显示 if(sys_ctrl.auto_flag==1)lcd1602_show_string(12,0,"Manl"); else lcd1602_show_string(12,0,"Auto"); //阈值设置位置闪烁 switch(sys_ctrl.mode) { case 1://液位下限 lcd1602_show_string(2,1," "); delay_ms(100); lcd1602_show_nums(2,1,sys_ctrl.levell,3,0); break; case 2://液位上限 lcd1602_show_string(11,1," "); delay_ms(100); lcd1602_show_nums(11,1,sys_ctrl.levelh,3,0); break; } break; } } //系统数据设置 void sys_data_set(void) { u8 key=0; key=key_scan(0); //模式设置 if(key==KEY3_PRESS || UART_RX_BUF[0]==MODE_CMD) { UART_RX_BUF[0]=0; //自动模式下,模式设置 if(sys_ctrl.auto_flag==0) { sys_ctrl.mode++; if(sys_ctrl.mode>2)sys_ctrl.mode=1; } //手动模式下,停止开关 else { MOTOR_JS=1;MOTOR_CS=1; } } //在设置模式下,加 else if(key==KEY1_PRESS || UART_RX_BUF[0]==ADD_CMD) { UART_RX_BUF[0]=0; switch(sys_ctrl.mode) { case 1://液位下限 sys_ctrl.levell++; if(sys_ctrl.levell>100)sys_ctrl.levell=0; break; case 2://液位上限 sys_ctrl.levelh++; if(sys_ctrl.levelh>100)sys_ctrl.levelh=0; break; } //手动模式,加水控制 if(sys_ctrl.auto_flag==1) { MOTOR_JS=0;MOTOR_CS=1; } } //在设置模式下,减 else if(key==KEY2_PRESS || UART_RX_BUF[0]==MIN_CMD) { UART_RX_BUF[0]=0; switch(sys_ctrl.mode) { case 1://液位下限 sys_ctrl.levell--; if(sys_ctrl.levell<0)sys_ctrl.levell=100; break; case 2://液位上限 sys_ctrl.levelh--; if(sys_ctrl.levelh<0)sys_ctrl.levelh=100; break; } //手动模式,抽水控制 if(sys_ctrl.auto_flag==1) { MOTOR_JS=1;MOTOR_CS=0; } } //确定/自手动 else if(key==KEY4_PRESS || UART_RX_BUF[0]==SWITCH_CMD) { UART_RX_BUF[0]=0; if(sys_ctrl.mode!=0)//确定 sys_ctrl.mode=0; else//自动/手动切换 { sys_ctrl.auto_flag=!sys_ctrl.auto_flag; //自动模式下,关闭加水/抽水 if(sys_ctrl.auto_flag==0) { MOTOR_JS=1;MOTOR_CS=1; } } } } //系统功能控制 void sys_fun_ctrl(void) { //正常模式 if(sys_ctrl.mode==0) { //自动模式下控制 if(sys_ctrl.auto_flag==0) { //如果液位高于上限,声光报警,开启抽水 if(sys_ctrl.level>sys_ctrl.levelh) { MOTOR_JS=1;MOTOR_CS=0; beep_alarm(100,20); } //如果液位低于下限,声光报警,开启加水 else if(sys_ctrl.level<sys_ctrl.levell) { MOTOR_JS=0;MOTOR_CS=1; beep_alarm(100,20); } //正常液位,关闭加水抽水 else { MOTOR_JS=1;MOTOR_CS=1; } } } } //应用控制系统 void appdemo_show(void) { sys_parm_init();//系统参数初始化 lcd1602_init(); UART_Init(); UART_SendString("UART Init OK\r\n"); sys_open_show();//开机界面显示 while(1) { sys_data_get();//系统数据采集 sys_data_show();//系统数据显示 sys_data_set();//系统参数设置 sys_fun_ctrl();//系统控制处理 } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
三、实验现象
B站演示视频:https://space.bilibili.com/444388619



联系作者
视频地址:https://space.bilibili.com/444388619/video
专注于51单片机、STM32、国产32、DSP、Proteus、ardunio、ESP32、物联网软件开发,PCB设计,视频分享,技术交流。 -
相关阅读:
设计模式系列详解 -- 策略模式
docker--知识点提炼
Ubuntu ROS 报错【syntax error near unexpected token ‘newline‘】
el-pagination分页分页设置
Flutter 启动白屏
Python学习(6)--获取windows本地网卡和地址信息(1)
d结构用要求
06【数据库的约束】
OceanBase 4.2 主备库 FailOver 与 SwitchOver 概念
力扣:121. 买卖股票的最佳时机
- 原文地址:https://blog.csdn.net/Hello_Muyi/article/details/133794079
