-
《3D 数学基础》几何检测-相交性检测
目录
1. 2D直线相交

直线方程,求交点(x,y)。
(1)分母不为0,则有唯一一个解;
(2)分母为0,则平行。
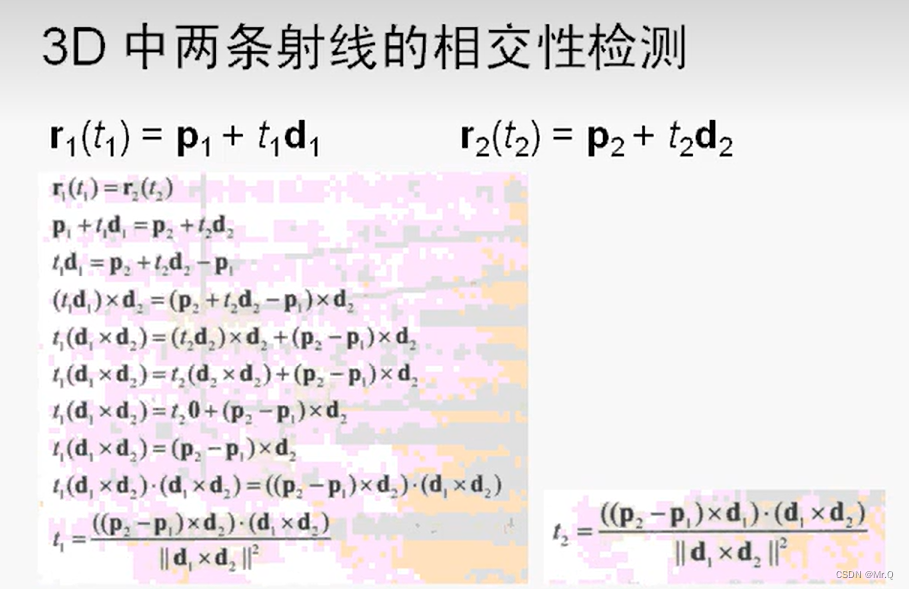
2. 3D射线相交点
其实是求t,知道相交点的t值,利用射线公式就知道相交点坐标。
3. 射线和平面的交点
把射线方程代入平面方程中,求出自变量t即可。

4. 3个平面的交点

交点p,以向量表示(x,y,z)。
5. 射线和圆或者球交点
求射线参数t.

其中a是将e投影到d,这个向量的长度是a, 投影公式是a=e·d; e=c-p0
6. 两个圆或者球是否相交
(1)静态相交性
圆心距离d < r1+r2时,不相交;为避免求d是开方,一般使用d^2 < (r1+r2)^2.

(2)动态相交性
两个球在分别移动d1和d2的过程中是否会相交的,如下,d1和d2是移动向量

因为移动是相对的,所以可以将左边的球设置为静止的,右边的移动方向就变成d,如下。
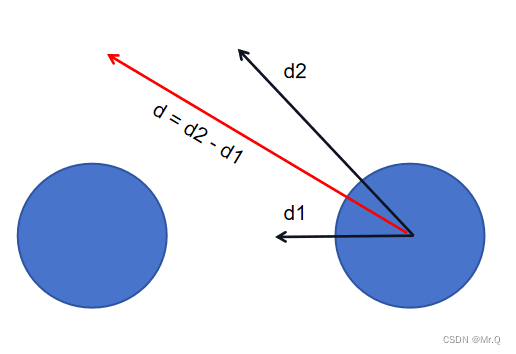
以c_m为原点,d为移动的方向向量,t为自变量的射线p(t) = c_m + td。变成了求射线自变量t值。

其r=r_s + r_m。

7. 球和平面的相交性检测
(1)静态相交性
平面公式: p·n = d,n是单位向量; 球:由半径r和球心初始位置c表示。
计算球心到平面的距离:dis = n·c - d
- dis >= r,球完全在平面的前面;
- dis<= -r,在平面的背面;
- 否则,球横跨平面(即相交)。
(2)动态相交性
如果两个都在运动,则换成一个静止,一个做相对运动(如上面的两个圆或者球是否相交)

单位向量d指明方向,使用射线方程c+td记录球心运动轨迹。平面公式是p·n=d,n是单位向量。球心运动t时,会与平面相交。
交点是c - r n
后面几个较为复杂
8. 射线和AABB的相交性(13.17)
附录有实现
9. 射线和三角形的相交性(13.16)
书上有实现。
10. 两个AABB的相交性(也叫碰撞检测)
静止相交性检测是简单的,需要在每个维度上单独检测他们的相交性即可。

动态的很复杂。且实际情况中,很少有轴对齐于同一个坐标系空间中的。
-
相关阅读:
【Python】Django Web 框架
关于五度圈
契约锁助力服装全产业链8大核心业务、20+文件电子签
平时健身买什么耳机好、分享五款最好的运动耳机推荐
vue补充继上一篇
如何实现随时随地可靠的无线通信?
微信小程序学习(二):常用样式和组件
移动设备管理(MDM)有哪些关键功能?
Oracle数据库
如何做代码评审(code review)
- 原文地址:https://blog.csdn.net/jizhidexiaoming/article/details/133789566