-
Jetson Orin NX 开发指南(7): EGO-Swarm 的编译与运行
一、前言
EGO-Planner 浙江大学 FAST-LAB 实验室的开源轨迹规划算法是,受到 IEEE Spectrum 等知名科技媒体的报道,其理论技术较为前沿,是一种不依赖于ESDF,基于B样条的规划算法,并且规划成功率、算法消耗时间、代价数值等性能方面都要高于其他几种知名算法。
而 EGO-Swarm 是基于 EGO-Planner 拓展的去中心化的无人机集群算法,有助于智能小车或自主无人机集群的规划的学习与开发
由于 EGO-Planner 是 EGO-Swarm 的一部分,并且他们的安装其实差别不大,因此本文主要介绍 EGO-Swarm 的编译与运行,参考
https://github.com/ZJU-FAST-Lab/ego-planner-swarm
https://github.com/ZJU-FAST-Lab/ego-planner
GitHub - ZJU-FAST-Lab/Fast-Drone-250: hardware and software design of the 250mm autonomous drone
由于 Jetson 系列开发板常用于当作机载电脑,因此本文介绍如何在 Jetson Orin NX 开发板上编译和运行 EGO-Swarm,当然本文对 EGO-Planner 同样适用。
二、编译 EGO-Swarm
首先安装依赖
sudo apt-get install libarmadillo-dev然后创建并进入工作空间
- mkdir -p ~/catkin_ws/src/
- cd ~/catkin_ws/src/
从 GitHub 上下载 EGO-Swarm 源码
git clone https://github.com/ZJU-FAST-Lab/ego-planner-swarm.git进入 EGO-Swarm 工作空间并编译
- cd ~/catkin_ws/src/ego-planner-swarm
- catkin_make
编译完成显示如下结果
三、运行 EGO-Swarm
接下来我们运行 EGO-Swarm,主要分为仿真和实验两个部分
3.1 EGO-Swarm 仿真
首先通过快捷键 ctrl + alt + A 打开超级终端,如果没有安装则参考下文安装
Jetson Orin NX 开发指南(2): 基本环境配置_想要个小姑娘的博客-CSDN博客
将超级终端划分为两个终端,全选后 source 一下工作空间,终端输入
source ~/catkin_ws/src/ego-planner-swarm/devel/setup.bash
在第一个终端输入
roslaunch ego_planner rviz.launch在第二个终端输入
roslaunch ego_planner swarm.launch如下所示
依次执行可以得到如下结果

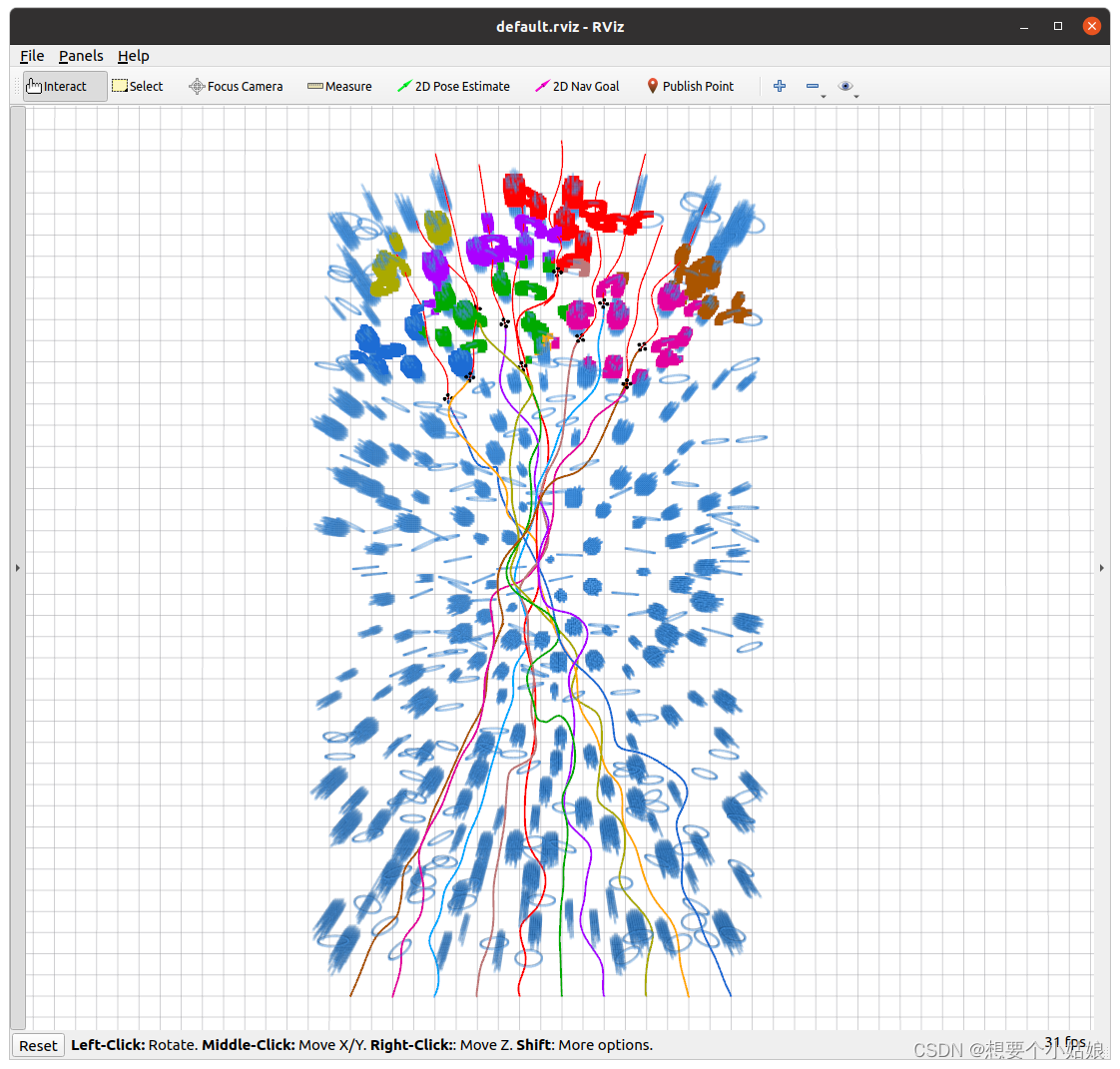
至此,EGO-Swarm 的仿真运行就实现了!
3.2 EGO-Swarm 实验
由于条件有限,我么在此仅仅只是将 EGO-Swarm 与 VINS-Fusion 进行连接,并且这里只涉及单个无人机(在这种情况下 EGO-Swarm 与 EGO-Planner 是等价的),其中 EGO-Swarm 单个无人机通过 VINS-Fusion 来获取里程计信息,同时通过深度相机数据来获取周围环境的情况。
3.2.1 创建文件配置
首先需要配置实验用的一些参数,对应于仿真中的 advanced_param.xml 文件,
其次需要配置调用 VINS-Fusion 里程计信息和 Realsense 深度相机信息的 launch 启动文件,对应于仿真中的 single_run_in_sim.launch 文件,
此外还需要用于可视化的 rviz 文件,对应于仿真中的 default.rviz 文件,
具体的配置可以参考 FAST-LAB 实验室的 fast-drone-250 中采用的 xml 和 launch 文件:
GitHub - ZJU-FAST-Lab/Fast-Drone-250: hardware and software design of the 250mm autonomous drone
主要是如下三个文件


但是由于 VINS-Fusion 中里程计发布的话题是 /vins_estimator/imu_propagate,而上面订阅的话题是 /vins_fusion/imu_propagate,这是因为在 fast-drone-250 中,vins_estimator 节点被重命名为了 vins_fusion,从而产生了差异,只需修改以下订阅的话题即可,其余的可以不做修改,(当然如果标定了相机内外参以及 imu 的噪声,则可以将之后的数据修改上去,VINS-Fusion 或者 EGO-Swarm 上都要修改),具体操作如下
在 ~/catkin_ws/src/ego-planner-swarm/src/planner/plan_manage/launch/ 路径下创建四个文件
(1)advanced_param_exp.xml,其内容如下
- <launch>
- <arg name="map_size_x_"/>
- <arg name="map_size_y_"/>
- <arg name="map_size_z_"/>
- <arg name="odometry_topic"/>
- <arg name="camera_pose_topic"/>
- <arg name="depth_topic"/>
- <arg name="cloud_topic"/>
- <arg name="cx"/>
- <arg name="cy"/>
- <arg name="fx"/>
- <arg name="fy"/>
- <arg name="max_vel"/>
- <arg name="max_acc"/>
- <arg name="planning_horizon"/>
- <arg name="point_num"/>
- <arg name="point0_x"/>
- <arg name="point0_y"/>
- <arg name="point0_z"/>
- <arg name="point1_x"/>
- <arg name="point1_y"/>
- <arg name="point1_z"/>
- <arg name="point2_x"/>
- <arg name="point2_y"/>
- <arg name="point2_z"/>
- <arg name="point3_x"/>
- <arg name="point3_y"/>
- <arg name="point3_z"/>
- <arg name="point4_x"/>
- <arg name="point4_y"/>
- <arg name="point4_z"/>
- <arg name="flight_type"/>
- <arg name="use_distinctive_trajs"/>
- <arg name="obj_num_set"/>
- <arg name="drone_id"/>
- <!-- main node -->
- <!-- <node pkg="ego_planner" name="ego_planner_node" type="ego_planner_node" output="screen" launch-prefix="valgrind"> -->
- <node pkg="ego_planner" name="drone_$(arg drone_id)_ego_planner_node" type="ego_planner_node" output="screen">
- <remap from="~odom_world" to="$(arg odometry_topic)"/>
- <remap from="~planning/bspline" to = "/drone_$(arg drone_id)_planning/bspline"/>
- <remap from="~planning/data_display" to = "/drone_$(arg drone_id)_planning/data_display"/>
- <remap from="~planning/broadcast_bspline_from_planner" to = "/broadcast_bspline"/>
- <remap from="~planning/broadcast_bspline_to_planner" to = "/broadcast_bspline"/>
- <remap from="~grid_map/odom" to="$(arg odometry_topic)"/>
- <remap from="~grid_map/cloud" to="$(arg cloud_topic)"/>
- <remap from="~grid_map/pose" to = "$(arg camera_pose_topic)"/>
- <remap from="~grid_map/depth" to = "$(arg depth_topic)"/>
- <!-- planning fsm -->
- <param name="fsm/flight_type" value="$(arg flight_type)" type="int"/>
- <param name="fsm/thresh_replan_time" value="1.0" type="double"/>
- <param name="fsm/thresh_no_replan_meter" value="1.0" type="double"/>
- <param name="fsm/planning_horizon" value="$(arg planning_horizon)" type="double"/> <!--always set to 1.5 times grater than sensing horizen-->
- <param name="fsm/planning_horizen_time" value="3" type="double"/>
- <param name="fsm/emergency_time" value="1.0" type="double"/>
- <param name="fsm/realworld_experiment" value="true"/>
- <param name="fsm/fail_safe" value="true"/>
- <param name="fsm/waypoint_num" value="$(arg point_num)" type="int"/>
- <param name="fsm/waypoint0_x" value="$(arg point0_x)" type="double"/>
- <param name="fsm/waypoint0_y" value="$(arg point0_y)" type="double"/>
- <param name="fsm/waypoint0_z" value="$(arg point0_z)" type="double"/>
- <param name="fsm/waypoint1_x" value="$(arg point1_x)" type="double"/>
- <param name="fsm/waypoint1_y" value="$(arg point1_y)" type="double"/>
- <param name="fsm/waypoint1_z" value="$(arg point1_z)" type="double"/>
- <param name="fsm/waypoint2_x" value="$(arg point2_x)" type="double"/>
- <param name="fsm/waypoint2_y" value="$(arg point2_y)" type="double"/>
- <param name="fsm/waypoint2_z" value="$(arg point2_z)" type="double"/>
- <param name="fsm/waypoint3_x" value="$(arg point3_x)" type="double"/>
- <param name="fsm/waypoint3_y" value="$(arg point3_y)" type="double"/>
- <param name="fsm/waypoint3_z" value="$(arg point3_z)" type="double"/>
- <param name="fsm/waypoint4_x" value="$(arg point4_x)" type="double"/>
- <param name="fsm/waypoint4_y" value="$(arg point4_y)" type="double"/>
- <param name="fsm/waypoint4_z" value="$(arg point4_z)" type="double"/>
- <param name="grid_map/resolution" value="0.15" />
- <param name="grid_map/map_size_x" value="$(arg map_size_x_)" />
- <param name="grid_map/map_size_y" value="$(arg map_size_y_)" />
- <param name="grid_map/map_size_z" value="$(arg map_size_z_)" />
- <param name="grid_map/local_update_range_x" value="5.5" />
- <param name="grid_map/local_update_range_y" value="5.5" />
- <param name="grid_map/local_update_range_z" value="4.5" />
- <param name="grid_map/obstacles_inflation" value="0.299" />
- <param name="grid_map/local_map_margin" value="10"/>
- <param name="grid_map/ground_height" value="-0.01"/>
- <!-- camera parameter -->
- <param name="grid_map/cx" value="$(arg cx)"/>
- <param name="grid_map/cy" value="$(arg cy)"/>
- <param name="grid_map/fx" value="$(arg fx)"/>
- <param name="grid_map/fy" value="$(arg fy)"/>
- <!-- depth filter -->
- <param name="grid_map/use_depth_filter" value="true"/>
- <param name="grid_map/depth_filter_tolerance" value="0.15"/>
- <param name="grid_map/depth_filter_maxdist" value="5.0"/>
- <param name="grid_map/depth_filter_mindist" value="0.2"/>
- <param name="grid_map/depth_filter_margin" value="2"/>
- <param name="grid_map/k_depth_scaling_factor" value="1000.0"/>
- <param name="grid_map/skip_pixel" value="2"/>
- <!-- local fusion -->
- <param name="grid_map/p_hit" value="0.65"/>
- <param name="grid_map/p_miss" value="0.35"/>
- <param name="grid_map/p_min" value="0.12"/>
- <param name="grid_map/p_max" value="0.90"/>
- <param name="grid_map/p_occ" value="0.80"/>
- <param name="grid_map/min_ray_length" value="0.3"/>
- <param name="grid_map/max_ray_length" value="5.0"/>
- <param name="grid_map/visualization_truncate_height" value="1.8"/>
- <param name="grid_map/show_occ_time" value="false"/>
- <param name="grid_map/pose_type" value="2"/>
- <param name="grid_map/frame_id" value="world"/>
- <!-- planner manager -->
- <param name="manager/max_vel" value="$(arg max_vel)" type="double"/>
- <param name="manager/max_acc" value="$(arg max_acc)" type="double"/>
- <param name="manager/max_jerk" value="4" type="double"/>
- <param name="manager/control_points_distance" value="0.4" type="double"/>
- <param name="manager/feasibility_tolerance" value="0.05" type="double"/>
- <param name="manager/planning_horizon" value="$(arg planning_horizon)" type="double"/>
- <param name="manager/use_distinctive_trajs" value="$(arg use_distinctive_trajs)" type="bool"/>
- <param name="manager/drone_id" value="$(arg drone_id)"/>
- <!-- trajectory optimization -->
- <param name="optimization/lambda_smooth" value="1.0" type="double"/>
- <param name="optimization/lambda_collision" value="0.5" type="double"/>
- <param name="optimization/lambda_feasibility" value="0.1" type="double"/>
- <param name="optimization/lambda_fitness" value="1.0" type="double"/>
- <param name="optimization/dist0" value="0.5" type="double"/>
- <param name="optimization/swarm_clearance" value="0.5" type="double"/>
- <param name="optimization/max_vel" value="$(arg max_vel)" type="double"/>
- <param name="optimization/max_acc" value="$(arg max_acc)" type="double"/>
- <param name="bspline/limit_vel" value="$(arg max_vel)" type="double"/>
- <param name="bspline/limit_acc" value="$(arg max_acc)" type="double"/>
- <param name="bspline/limit_ratio" value="1.1" type="double"/>
- <!-- objects prediction -->
- <param name="prediction/obj_num" value="$(arg obj_num_set)" type="int"/>
- <param name="prediction/lambda" value="1.0" type="double"/>
- <param name="prediction/predict_rate" value="1.0" type="double"/>
- </node>
- </launch>
(2)single_run_in_exp.launch,其内容如下
- <launch>
- <!-- number of moving objects -->
- <arg name="obj_num" value="10" />
- <arg name="drone_id" value="0"/>
- <arg name="map_size_x" value="100"/>
- <arg name="map_size_y" value="50"/>
- <arg name="map_size_z" value="3.0"/>
- <arg name="odom_topic" value="/vins_estimator/imu_propagate"/>
- <!-- main algorithm params -->
- <include file="$(find ego_planner)/launch/advanced_param_exp.xml">
- <arg name="drone_id" value="$(arg drone_id)"/>
- <arg name="map_size_x_" value="$(arg map_size_x)"/>
- <arg name="map_size_y_" value="$(arg map_size_y)"/>
- <arg name="map_size_z_" value="$(arg map_size_z)"/>
- <arg name="odometry_topic" value="$(arg odom_topic)"/>
- <arg name="obj_num_set" value="$(arg obj_num)" />
- <!-- camera pose: transform of camera frame in the world frame -->
- <!-- depth topic: depth image, 640x480 by default -->
- <!-- don't set cloud_topic if you already set these ones! -->