-
射频识别技术课程实验--模拟串口间的通信--基础实验
射频识别技术课程实验–模拟串口间的通信
前期准备
串口调试小助手:

模拟串口工具:

Visual Studio 2022:

测试代码(c++):
#include#include using namespace std; int main() { system("color 3F"); HANDLE hCom = CreateFile("\\\\.\\COM2", GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING,// 指定串口编号 FILE_ATTRIBUTE_NORMAL | FILE_FLAG_OVERLAPPED, NULL); if (INVALID_HANDLE_VALUE == hCom) { cout << "serial open failed" << endl; system("pause"); return -1; }; //设置串口 //1、设置输入输出缓冲区大小 SetupComm(hCom, 1024, 1024); //2、设置时延 COMMTIMEOUTS TimeOuts; TimeOuts.ReadIntervalTimeout = 1000; TimeOuts.ReadTotalTimeoutMultiplier = 500; TimeOuts.ReadTotalTimeoutConstant = 5000;//设定写超时 TimeOuts.WriteTotalTimeoutMultiplier = 500; TimeOuts.WriteTotalTimeoutConstant = 2000; SetCommTimeouts(hCom, &TimeOuts); //3、DCB结构体 DCB dcb; GetCommState(hCom, &dcb); dcb.BaudRate = 9600; dcb.ByteSize = 32; dcb.StopBits = 1; SetCommState(hCom, &dcb); //4、清空硬件的通信错误,清空输入输出缓冲,为W/R做准备 PurgeComm(hCom, PURGE_RXCLEAR | PURGE_TXCLEAR | PURGE_RXABORT | PURGE_TXABORT); //5、发送串口信息 char buffer[] = { 0XFE, 0X03, 0X04, 0X00, 0X03, 0X00, 0X00, 0X00, 0X00, 0X00, 0XFA }; DWORD dwBytesToWrite = sizeof(buffer); DWORD dwBytesRealWrite; DWORD dwErrorFlags; COMSTAT comStat; OVERLAPPED osWrite; //memset(&osWrite,0,sizeof(OVERLAPPED)); osWrite.hEvent = CreateEvent(NULL, TRUE, FALSE, NULL); osWrite.Offset = 0; osWrite.OffsetHigh = 0; //清除硬件通信错误; ClearCommError(hCom, &dwErrorFlags, &comStat); BOOL bWriteStatus; bWriteStatus = WriteFile(hCom, buffer, dwBytesToWrite, &dwBytesRealWrite, &osWrite); int m = GetLastError(); if (!bWriteStatus) { if (GetLastError() == ERROR_IO_PENDING) { WaitForSingleObject(osWrite.hEvent, 2000); //清理IO缓冲区; PurgeComm(hCom, PURGE_RXCLEAR | PURGE_TXCLEAR | PURGE_RXABORT | PURGE_TXABORT); } else { cout << "failed to send" << endl; system("pause"); return -1; } PurgeComm(hCom, PURGE_RXCLEAR | PURGE_TXCLEAR | PURGE_RXABORT | PURGE_TXABORT); } PurgeComm(hCom, PURGE_RXCLEAR | PURGE_TXCLEAR | PURGE_RXABORT | PURGE_TXABORT); //6、接收串口信息 unsigned char lpInBuffer[1024]; DWORD dwBytesRead; OVERLAPPED osRead; memset(&osRead, 0, sizeof(OVERLAPPED)); BOOL bReadStatus; DWORD dwRealRead; while (1) { dwBytesRead = 1024; osRead.hEvent = CreateEvent(NULL, TRUE, FALSE, NULL); ClearCommError(hCom, &dwErrorFlags, &comStat); dwBytesRead = min(dwBytesRead, (DWORD)comStat.cbInQue); if (!dwBytesRead) { //cout << "no data to be read" << endl; Sleep(1000); continue; } bReadStatus = ReadFile(hCom, lpInBuffer, dwBytesRead, &dwRealRead, &osRead); if (!bReadStatus) //如果ReadFile函数返回FALSE { if (GetLastError() == ERROR_IO_PENDING) //GetLastError()函数返回ERROR_IO_PENDING,表明串口正在进行读操作 { WaitForSingleObject(osRead.hEvent, 2000); //使用WaitForSingleObject函数等待,直到读操作完成或延时已达到2秒钟 //当串口读操作进行完毕后,osRead的hEvent事件会变为有信号 PurgeComm(hCom, PURGE_TXABORT | PURGE_RXABORT | PURGE_TXCLEAR | PURGE_RXCLEAR); short *temp = new short[dwRealRead + 1]; for (int i = 0; i < dwBytesRead; ++i) { temp[i] = lpInBuffer[i]; printf("%02X", temp[i]); } cout << endl; /*delete[] temp;*/ } else cout << "failed to read" << endl; } else { short *temp = new short[dwRealRead + 1]; for (int i = 0; i < dwBytesRead; ++i) { temp[i] = lpInBuffer[i]; printf("%02X", temp[i]); } cout << endl; delete[] temp; } Sleep(1000); PurgeComm(hCom, PURGE_RXCLEAR | PURGE_TXCLEAR | PURGE_RXABORT | PURGE_TXABORT); } PurgeComm(hCom, PURGE_RXCLEAR | PURGE_TXCLEAR | PURGE_RXABORT | PURGE_TXABORT); system("pause"); } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
实验过程
基础实验
-
模拟两个串口

-
打开两个串口调试小助手,分别打开上一步模拟的两个串口,这里我创建的串口名字为“COM1”和“COM2”。

-
测试串口连通性:

可以看到串口连通性正常,两端都可以互相发送数据。

-
打开Visual Studio 2022,新建空项目

-
将准备好的代码放在源文件中,运行调试:

发现提示serial open failed,这是因为我们一开始打开了两个串口,并且代码中指定串口编号为COM2,但是COM2已经打开了,所以报错串口开启失败。
HANDLE hCom = CreateFile("\\\\.\\COM2", GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING,// 指定串口编号- 1
-
于是我们关闭COM2,保留COM1
这时再次运行C++程序,使用串口COM1发送数据:
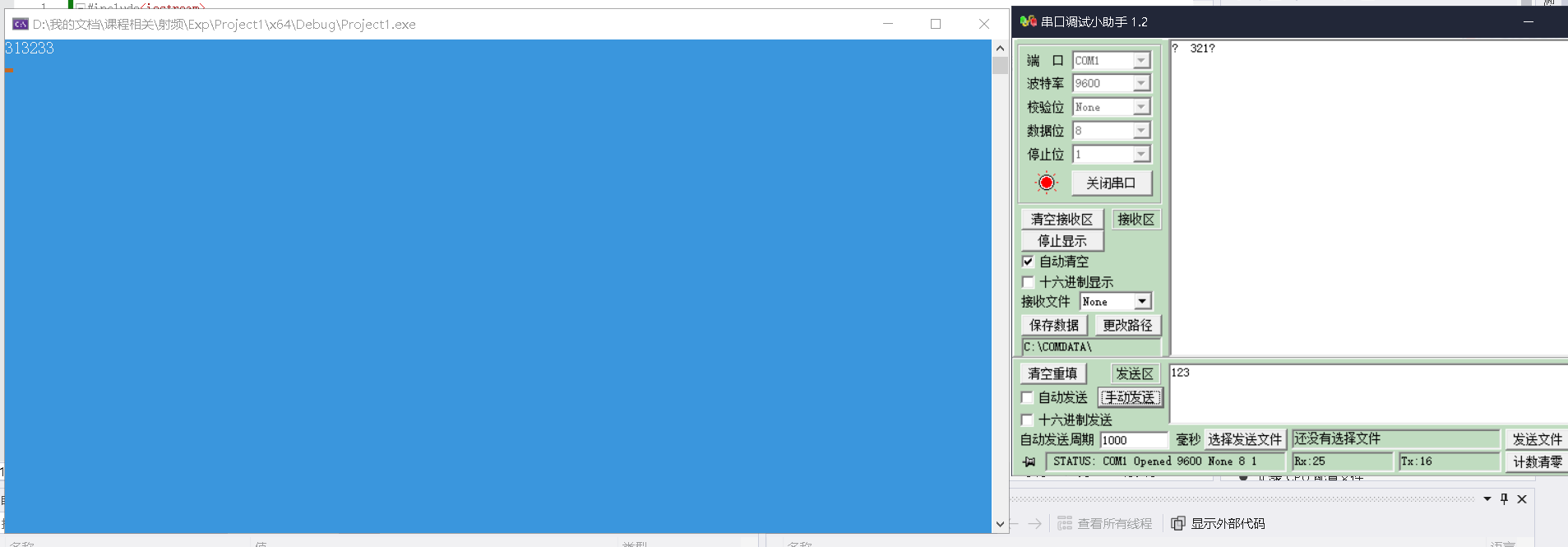
此时我们的C++程序扮演的角色其实就是串口COM2,接收到串口COM1发送的数据,至此,基础实验部分就完成了。
-
相关阅读:
Spring事务里required里多线程调用required_new方法到底符不符合预期
模糊离散事件系统的可测性
结构方程模型调整
python计算阶层
Python之魔幻切片——万物可切(只要是序列对象)。负整数步长一出,序列瞬间倒置,可以玩儿更多花样。
机器学习(18)---朴素贝叶斯
有趣的 Kotlin 0x0E:DeepRecursiveFunction
Vue2路由知识大杂烩, 一下给你全整明白(上)
时序预测 | MATLAB实现ARIMA时间序列预测(GDP预测)
强烈推荐APP破解常用工具集合!
- 原文地址:https://blog.csdn.net/liujaiqi111/article/details/133713335
