-
yolo增加MPDIoU loss
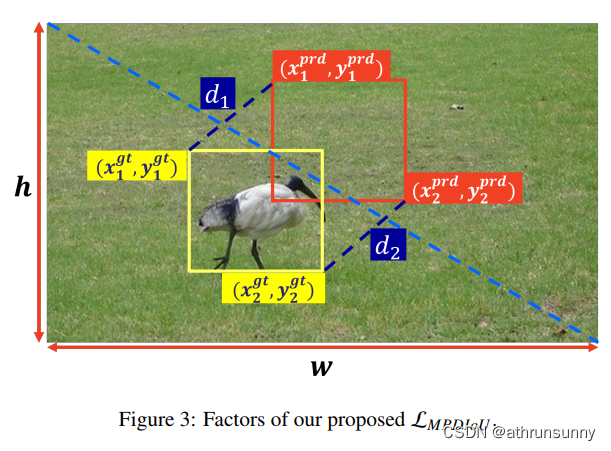
边界框回归(Bounding Box Regression,BBR)在目标检测和实例分割中被广泛应用,是定位目标的重要步骤。然而,大多数现有的边界框回归损失函数在预测框与实际标注框具有相同的宽高比但宽度和高度值完全不同的情况下无法进行优化。为了解决上述问题,作者充分探索了水平矩形的几何特征,提出了一种基于最小点距离的边界框相似度比较度量——MPDIoU,其中包含了现有损失函数中考虑的所有相关因素,例如重叠或非重叠面积、中心点距离以及宽度和高度的偏差,同时简化了计算过程。在此基础上,作者提出了一种基于MPDIoU的边界框回归损失函数。
关于MPDIoU:
MPDIoU: A Loss for Efficient and Accurate Bounding BoxRegression--论文学习笔记_athrunsunny的博客-CSDN博客
指标如下

根据下图的公式,以及原理图进行复现,如有问题还请大佬不吝赐教,相互交流

在metrics.py中修改bbox_iou函数
- def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, MDPIoU=False, feat_h=640, feat_w=640,
- eps=1e-7):
- # Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)
- # Get the coordinates of bounding boxes
- if xywh: # transform from xywh to xyxy
- (x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, 1), box2.chunk(4, 1)
- w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
- b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
- b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
- else: # x1, y1, x2, y2 = box1
- b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, 1)
- b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, 1)
- w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1
- w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1
- # Intersection area
- inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
- (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
- # Union Area
- union = w1 * h1 + w2 * h2 - inter + eps
- # IoU
- iou = inter / union
- if CIoU or DIoU or GIoU:
- cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
- ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
- if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
- c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
- rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2
- if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
- v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)
- with torch.no_grad():
- alpha = v / (v - iou + (1 + eps))
- return iou - (rho2 / c2 + v * alpha) # CIoU
- return iou - rho2 / c2 # DIoU
- c_area = cw * ch + eps # convex area
- return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf
- elif MDPIoU:
- d1 = (b2_x1 - b1_x1) ** 2 + (b2_y1 - b1_y1) ** 2
- d2 = (b2_x2 - b1_x2) ** 2 + (b2_y2 - b1_y2) ** 2
- mpdiou_hw_pow = feat_h ** 2 + feat_w ** 2
- return iou - d1 / mpdiou_hw_pow - d2 / mpdiou_hw_pow # MPDIoU
- return iou # IoU
在loss.py中修改iou的计算方式
iou = bbox_iou(pbox, tbox[i], MDPIoU=True, feat_h=tobj.size()[2], feat_w=tobj.size()[3]).squeeze() -
相关阅读:
由于.git/config导致的Git存储库泄露
[附源码]java毕业设计置地房屋租赁信息系统
JS进阶-构造函数创建对象
Bear and Prime 100(交互题)
DataGrip 如何导出和恢复整个数据库数据,使用单个 SQL 文件
spring boot+MySQL婚纱影楼管理系统vue
Android 监听网络状态变化
Linux下“多线程”相关内容整理总结
Oracle根据主键获取对应表和修改序列器当前值
Django3+Vue美多商城项目的总结
- 原文地址:https://blog.csdn.net/athrunsunny/article/details/132796892
