-
单片机第二季:温度传感器DS18B20
目录
1,DS18B20介绍
DS18B20的基本特征:
(1)内置集成ADC,外部数字接口,也就是可以直接与单片机的数字接口连接,DS18B20 在使用中不需要任何外围元件,全部传感元件及转换电路集成在形如一只三极管的集成电路内;
(2)单总线数字接口,布线成本低,独特的单线接口方式,DS18B20 在与微处理器连接时仅需要一条线即可实现微处理器与DS18B20 的双向通讯;
(3)温范围-55℃~+125℃,在-10~+85℃时精度为±0.5℃;
(4)数字值温度分辨率位数可软件设置,可根据需要设置分辨率位数,可编程的分辨率为9~12 位,对应的可分辨温度分别为0.5℃、0.25℃、0.125℃ 和0.0625℃,可实现高精度测温;
(5)温度阈值报警功能,且阈值可内置存储掉电不丢失;
(6)在9 位分辨率时最多在93.75ms 内把温度转换为数字,12 位分辨率时最多在750ms 内把温度值转换为数字,速度更快,DS18B20温度采集是由主CPU控制,需要采集温度时才工作;
(7)内置唯一64位序列码,CPU可以单线串联无限多个DS18B20,CPU通过序列码识别与哪个DS18B20通信,DS18B20 支持多点组网功能,多个DS18B20 可以并联在唯一的三线上,实现组网多点测温;
(8)支持VDD供电,或通过数据总线及内部电容实现寄生电源供电,也就是可以通过数据线(DQ)来供电,如果通过数据线供电,数据线在不传输数据时,需要拉高,否则如果内部电容没电时DS18B20就不能工作了;(9)测量结果直接输出数字温度信号,以"一根总线"串行传送给CPU,同时可传送CRC 校验码,具有极强的抗干扰纠错能力

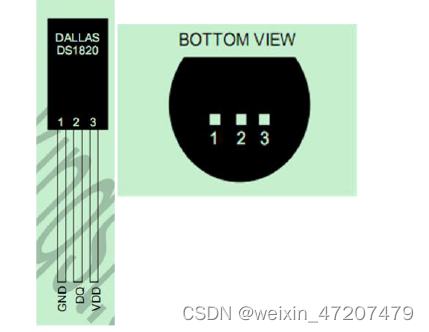
使用到的三根线是GND(接地)、DQ(数据线)、VCC(电源线),当然也可以只使用GND和DQ。
综合评价:
(1)DS18B20是很多年前的东西了;
(2)现在趋向于温度+湿度的综合传感器;
(3)现实应用一般低端用热敏电阻、热电偶,高端用精密传感器;
(4)学习重点和难点是单总线协议的时序编程实现;2,DS18B20数据手册

上图为DS18B20的内部框图。内部的64位的ROM存储其独一无二的序列号。暂存存储器(The scratchpad memory)包含了存储有数字温度结果的2个字节宽度的温度寄存器。另外,暂存存储器还提供了一个字节的过温和低温(TH和TL)温度报警寄存器和一个字节的配置寄存器。配置寄存器允许用户自定义温度转换为9、10、11、12位精度。过温和低温(TH和TL)温度报警寄存器是非易失性的(EEPROM),所以其可以在设备断电的情况下保存。
DS18B20的另外一个特性就是可以无需外部电源供电。当数据线DQ为高的时候由其为设备供电。总线拉高的时候为内部电容(Spp)充电,当总线拉低是由该电容向设备供电。这种由1-Wire总线为设备供电的方式称为“寄生电源”。此外,DS18B20也可以由外部电源通过VDD供电。
DS18B20的核心功能是直接温度-数字测量。其温度转换可由用户自定义为9、10、11、12位精度分别为0.5℃、0.25℃、0.125℃、0.0625℃分辨率。值得注意的是,上电默认为12位转换精度。DS18B20上电后工作在低功耗闲置状态下。主设备必须向DS18B20发送温度转换命令[44h]才能开始温度转换。温度转换后,温度转换的值将会保存在暂存存储器的温度寄存器中,并且DS18B20将会恢复到闲置状态。如果DS18B20是由外部供电,当发送完温度转换命令[44h]后,主设备可以执行“读数据时序”,若此时温度转换正在进行DS18B20将会响应“0”,若温度转换完成则会响应“1”。如果DS18B20是由“寄生电源”供电,该响应的技术将不能使用,因为在整个温度转换期间,总线必须强制拉高。
ROM 中的64 位序列号是出厂前被光刻好的,它可以看作是该DS18B20 的地址序列号。64 位光刻ROM 的排列是:开始8 位(28H)是产品类型标号,接着的48 位是该DS18B20 自身的序列号,最后8 位是前面56 位的循环冗余校验码。光刻ROM 的作用是使每一个DS18B20 都各不相同,这样就可以实现一根总线上挂接多个DS18B20 的目的。
DS18B20 温度传感器的内部存储器包括一个高速的暂存器RAM 和一个非易失性的可电擦除的EEPROM,后者存放高温度和低温度触发器TH、TL 和配置寄存器。
配置寄存器是配置不同的位数来确定温度和数字的转化,配置寄存器结构如下:

低五位一直都是"1",TM 是测试模式位,用于设置DS18B20 在工作模式还是在测试模式。在DS18B20 出厂时该位被设置为0,用户不需要去改动。R1 和R0 用来设置DS18B20 的精度(分辨率),可设置为9,10,11 或12 位,对应的分辨率温度是0.5℃,0.25℃,0.125℃和0.0625℃。R0 和R1 配置如下图:
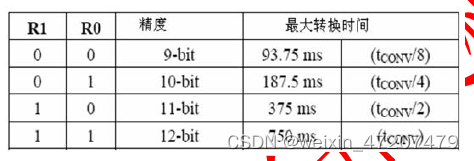
在初始状态下默认的精度是12 位,即R0=1、R1=1。高速暂存存储器由9 个字节组成,其分配如下:

当温度转换命令(44H)发布后,经转换所得的温度值以二字节补码形式存放在高速暂存存储器的第0 和第1 个字节。存储的两个字节,高字节的前5 位是符号位S,单片机可通过单线接口读到该数据,读取时低位在前,高位在后,数据格式如下:

如果测得的温度大于0,这5 位为‘ 0’,只要将测到的数值乘以0.0625(默认精度是12 位)即可得到实际温度;如果温度小于0,这5 位为‘ 1’,测到的数值需要取反加1 再乘以-0.0625 即可得到实际温度。温度与数据对应关系如下:

比如我们要计算+85 度,数据输出十六进制是0X0550,因为高字节的高5位为0,表明检测的温度是正温度,0X0550 对应的十进制为1360,将这个值乘以12 位精度0.0625,所以可以得到+85 度。
知道了怎么计算温度,接下来我们就来看看如何读取温度数据,由于DS18B20是单总线器件,所有的单总线器件都要求采用严格的信号时序,以保证数据的完整性。DS18B20 时序包括如下几种:初始化时序、写(0 和1)时序、读(0和1)时序。DS18B20 发送所有的命令和数据都是字节的低位在前。这里我们简单介绍这几个信号的时序:
2.1,初始化时序
单总线上的所有通信都是以初始化序列开始。主机输出低电平,保持低电平时间至少480us(该时间的范围可以从480 到960 微妙),以产生复位脉冲。接着主机释放总线,外部的上拉电阻将单总线拉高,延时15~60 us,并进入接收模式。接着DS18B20 拉低总线60~240 us,以产生低电平应答脉冲,若为低电平,还要做延时,其延时的时间从外部上拉电阻将单总线拉高算起最少要
480 微妙。初始化时序图如下:
注意:主机释放总线是指主机将这个port置1,因为port置1后可以被从设备拉低,但如果port被置0,就不能被从设备拉高,因此释放总线是将这个port置1。
由上述初始化时序,编写初始化函数代码:
- //DS18B20初始化
- unsigned char ds18b20_init()
- {
- DSPORT = 0; //主设备拉低总线,发送复位脉冲,持续时间超过480us
- void delay500us(void) //误差 -0.859028845284us
- {
- unsigned char a,b;
- for(b=1;b>0;b--)
- for(a=227;a>0;a--);
- }
- DSPORT = 1; //释放总线
- unsigned char i = 0;
- while(DSPORT) //检测DS18B20是否在一定时间内拉低总线,
- //根据时序图判断最长时间为300us
- {
- if(i>20)
- {
- return 0; //超过一定时间总线未被拉低,说明DS18B20没有发送存在脉冲
- }
- void delay20us(void) //误差 -0.468396780902us
- {
- unsigned char a,b;
- for(b=3;b>0;b--)
- for(a=1;a>0;a--);
- }
- i++;
- }
- return 1; //DS18B20在一定时间内响应了
- }
初始化就是,主机发送复位脉冲,从机发送存在脉冲,双方都收到后,初始化完成。
2.2,读写时序
下图为写时序图:

写时序有两种情况:“写1”时段和“写0”时段。主设备通过写1时段来向DS18B20中写入逻辑1以及通过写0时段来向DS18B20中写入逻辑0。每个写时段最小必须有60us的持续时间且独立的写时段间至少有1us的恢复时间。
为了形成写1时段,在将1-Wire总线拉低后,主设备必须在15us之内释放总线。当总线释放后,5kΩ的上拉电阻将总线拉至高。为了形成写0时段,在将1-Wire总线拉低后,在整个时段期间主设备必须一直拉低总线(至少60us)。
在主设备初始化写时段后,DS18B20将会在15us至60us的时间窗口内对总线进行采样。如果总线在采样窗口期间是高电平,则逻辑1被写入DS18B20;若总线是低电平,则逻辑0被写入DS18B20。
写时序对应代码:
- //DS18B20写命令函数
- void ds18b20_write(unsigned char data)
- {
- unsigned char i,j;
- for(j = 0;j<8;j++)
- {
- DSPORT = 0; //拉低总线,开始写时序,至少1us
- i++;
- DSPORT = data & 0x01; //从低字节开始
- void delay65us(void) //持续至少60us
- {
- unsigned char a;
- for(a=28;a>0;a--);
- }
- DSPORT = 1; //一个写周期后,至少间隔1us给总线恢复时间
- data >>= 1; //数据左移1位
- }
- }
下图为读时序图:

仅在读时段期间DS18B20才能向主设备传送数据。因此,主设备在执行完读暂存寄存器[BEh]或读取供电模式[B4h]后,必须及时地生成读时段,这样DS18B20才能提供所需的数据。此外,主设备可以在执行完转换温度[44h]或拷贝EEPROM[B8h]命令后生成读时段,以便获得在“DS18B20功能命令”章节中提到的操作信息。
每个读时段最小必须有60us的持续时间且独立的写时段间至少有1us的恢复时间。读时段通过主设备将总线拉低超过1us再释放总线来实现初始化。当主设备初始化完读时段后,DS18B20将会向总线发送0或者1。DS18B20通过将总线拉至高来发送逻辑1,将总线拉至低来发送逻辑0。当发送完0后,DS18B20将会释放总线,则通过上拉电阻该总线将会恢复到高电平的闲置状态。从DS18B20中输出的数据在初始化读时序后仅有15us的有效时间。因此,主设备在开始改读时段后的15us之内必须释放总线,并且对总线进行采样。
- //DS18B20 读命令函数
- unsigned char DS18B20_read()
- {
- unsigned char byte,bi;
- unsigned char i,j;
- for(j=0; j<8; j++)
- {
- DSPORT = 0; //拉低总线,开始时序
- i++;
- DSPORT = 1; //释放总线
- void delay6us(void) //延时6us等待总线上数据稳定
- {
- unsigned char a;
- for(a=1;a>0;a--);
- }
- bi = DSPORT; //要在15us内读取
- byte = (byte>>1)|(bi<<7);
- void delay45us(void) //延时至少45us
- {
- unsigned char a;
- for(a=19;a>0;a--);
- }
- }
- return byte;
- }
3,DS18B20工作流程
温度获取流程:
DS18B20不会主动进行温度测量, 需要主控主动发起温度转换命令,这是因为温度转换本身需要耗电的,所以设计为平时待机,收到温度转换命令后才会进行温度AD转换;
主控和DS18B20之间通讯是分周期的,让DS18B20进行温度转换就是一个周期。周期包含初始化和N个命令(每个周期的开始都有初始化);
初始化主要探测目标DS18B20是否存在,若存在将芯片初始化;
命令很重要,DS18B20是一个典型的“命令-响应”型外设;这种外设的关键是命令集;
ROM操作指令:
DS18B20支持多个芯片串联在一个总线上,就是所谓的单总线协议,需要主控区分总线上多个DS18B20,因此需要ROM操作指令来完成这个任务;
ROM操作指令和温度采集一点关系都没有,所以当总线上只有一个DS18B20时,不需要管ROM操作指令;
系统中总线上有多个DS18B20,需要借助ROM操作指令来区分多个DS18B20,可能需要多条ROM操作指令来完成;
只有一个DS18B20时,使用SKIP ROM (0xCC)忽略;
功能指令:
ROM操作指令是为了在单总线上多个DS18B20中挑选那个我们要操作的DS18B20;
功能指令是为了和选定的DS18B20进行温度采样,常用温度转换指令和温度读取指令;
4,代码
时序代码:
- #include "timesires.h"
- #include "uart.h"
- void delay500us() //误差 -0.859028845284us
- {
- unsigned char a,b;
- for(b=1;b>0;b--)
- for(a=227;a>0;a--);
- }
- void delay20us(void) //误差 -0.468396780902us
- {
- unsigned char a,b;
- for(b=3;b>0;b--)
- for(a=1;a>0;a--);
- }
- void delay65us() //持续至少60us
- {
- unsigned char a;
- for(a=28;a>0;a--);
- }
- void delay6us(void) //延时6us等待总线上数据稳定
- {
- unsigned char a;
- for(a=1;a>0;a--);
- }
- void delay45us(void) //延时至少45us
- {
- unsigned char a;
- for(a=19;a>0;a--);
- }
- void delay1ms(void) //误差 -0.651041666667us
- {
- unsigned char a,b;
- for(b=102;b>0;b--)
- for(a=3;a>0;a--);
- }
- void delay750ms(void) //误差 -0.000000000171us
- {
- unsigned char a,b,c;
- for(c=37;c>0;c--)
- for(b=66;b>0;b--)
- for(a=140;a>0;a--);
- }
- //DS18B20初始化
- unsigned char ds18b20_init()
- {
- unsigned char i = 0;
- DSPORT = 0; //主设备拉低总线,发送复位脉冲,持续时间超过480us
- delay500us();
- DSPORT = 1; //释放总线
- while(DSPORT) //检测DS18B20是否在一定时间内拉低总线,
- //根据时序图判断最长时间为300us
- {
- if(i>20)
- {
- return 0; //超过一定时间总线未被拉低,说明DS18B20没有发送存在脉冲
- }
- delay20us();
- i++;
- }
- return 1; //DS18B20在一定时间内响应了
- }
- //DS18B20写命令函数
- void ds18b20_write(unsigned char cmd)
- {
- unsigned char i = 0,j = 0;
- for(j = 0;j<8;j++)
- {
- DSPORT = 0; //拉低总线,开始写时序,至少1us
- i++;
- DSPORT = cmd & 0x01; //从低字节开始
- delay65us();
- DSPORT = 1; //一个写周期后,至少间隔1us给总线恢复时间
- cmd >>= 1; //数据左移1位
- }
- }
- //DS18B20 读命令函数
- unsigned char DS18B20_read()
- {
- unsigned char byte = 0,bi = 0;
- unsigned char i = 0,j = 0;
- for(j=0; j<8; j++)
- {
- DSPORT = 0; //拉低总线,开始时序
- i++;
- DSPORT = 1; //释放总线
- delay6us();
- bi = DSPORT; //要在15us内读取
- byte = (byte>>1)|(bi<<7);
- delay45us();
- }
- return byte;
- }
- void DS18B20_changeTempCmd()
- {
- ds18b20_init();
- delay1ms(); //如果没有这个延时,读取的温度会有问题,用手捏着时在串口助手中看到的值不变
- ds18b20_write(0xcc); //跳过ROM操作指令
- ds18b20_write(0x44); //温度转换命令
- delay750ms();
- //delay750ms();
- }
- void DS18B20_readTempCmd()
- {
- ds18b20_init();
- delay1ms();
- ds18b20_write(0xcc); //跳过ROM操作指令
- ds18b20_write(0xbe); //温度读取命令
- }
- unsigned int DS18B20_Temp_Read()
- {
- unsigned int temp = 0;
- unsigned char tmh = 0, tml = 0;
- DS18B20_changeTempCmd();
- DS18B20_readTempCmd();
- tml = DS18B20_read();
- tmh = DS18B20_read();
- temp = tmh;
- temp <<=8;
- temp |= tml;
- return temp;
- }
串口代码:
- #include "uart.h"
- // 串口设置为: 波特率9600、数据位8、停止位1、奇偶校验无
- // 使用的晶振是11.0592MHz的,注意12MHz和24MHz的不行
- void uart_init(void)
- {
- // 波特率9600
- SCON = 0x50; // 串口工作在模式1(8位串口)、允许接收
- PCON = 0x00; // 波特率不加倍
- // 通信波特率相关的设置
- TMOD = 0x20; // 设置T1为模式2
- TH1 = 253;
- TL1 = 253; // 8位自动重装,意思就是TH1用完了之后下一个周期TL1会
- // 自动重装到TH1去
- TR1 = 1; // 开启T1让它开始工作
- // ES = 1;
- // EA = 1;
- }
- // 通过串口发送1个字节出去
- void uart_send_byte(unsigned char c)
- {
- // 第1步,发送一个字节
- SBUF = c;
- // 第2步,先确认串口发送部分没有在忙
- while (!TI);
- // 第3步,软件复位TI标志位
- TI = 0;
- }
- void uart_send_adVal(unsigned int val)
- {
- uart_send_byte(val>>8); //AD采样的数据为12位的,首先左移8位串口输出高4位
- uart_send_byte(val); //再输出低8位
- }
main.c
- #include "timesires.h"
- #include "uart.h"
- #include
- void delay1s(void) //误差 -0.000000000227us
- {
- unsigned char a,b,c;
- for(c=13;c>0;c--)
- for(b=247;b>0;b--)
- for(a=142;a>0;a--);
- _nop_(); //if Keil,require use intrins.h
- }
- void main()
- {
- unsigned int ret = 0;
- uart_init();
- while(1)
- {
- ret = DS18B20_Temp_Read();
- uart_send_adVal(ret);
- delay1s();
- }
- }
代码完成后遇到一个问题:用手捏着DS18B20发现在串口调试助手中看到的值不变化,
原因:DS18B20_changeTempCmd()函数中,初始化后没有进行时间延迟,直接发送ROM操作命令ds18b20_write(0xcc),增加延迟函数后串口助手中显示值当用手捏着DS18B20会有变化。
-
相关阅读:
阿里开源的Java诊断利器Arthas
在Maven中配置代理服务器的详细教程
代码随想录算法训练营第五十二天|
【crx离线下载】Chrome 商店直接离线下载crx文件的方法
推荐:6款好用的安全审计工具!
gradle系列:理解Project.afterEvaluate
Android 基础知识4-2.1常用控件列表(ListView)
Linux--多线程(一)
JavaScript scope(作用域)知识
【redis】7.6 安装与配置Redis - (docker-compose)
- 原文地址:https://blog.csdn.net/weixin_47207479/article/details/132256635
