-
11 - YOLO算法二 (目标检测)
要点:
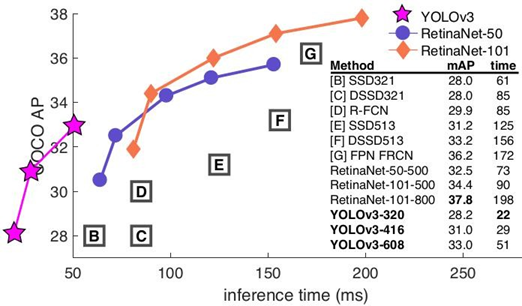
三 YOLO v3
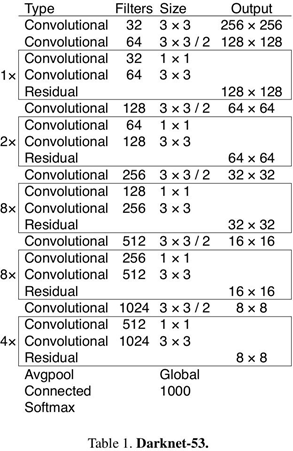
3.1 Darknet-53 (backbone)
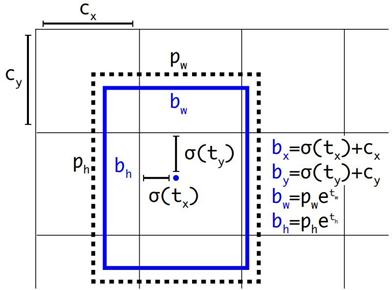
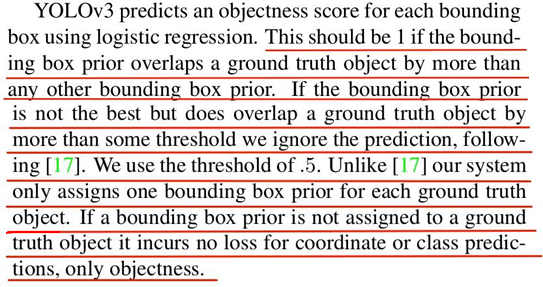
3.2 目标边界框的预测
将预测的边界框中心限制在当前cell中, s(x) = Sigmoid(x) 。
3.3 正负样本的匹配
3.4 损失的计算

3.4.1 置信度损失 (Binary Cross Entropy)

其中
![o_i \epsilon [0, 1],](https://1000bd.com/contentImg/2024/04/11/8fa61cdbd36e184b.png) 表示预测目标边界框与真实目标边界框的IOU c为预测值,
表示预测目标边界框与真实目标边界框的IOU c为预测值,  为c通过Sigmoid函数得到的预测置信度, N为正负样本个数.
为c通过Sigmoid函数得到的预测置信度, N为正负样本个数.3.4.2 类别损失 (Binary Cross Entropy)
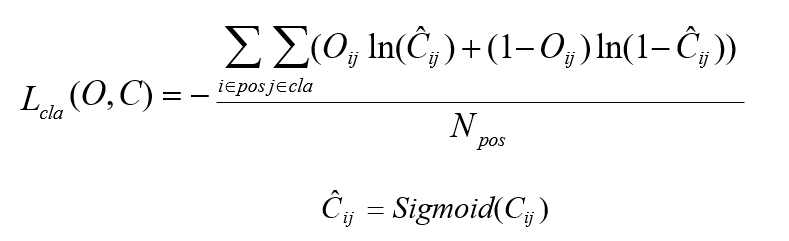

3.4.3 类别损失

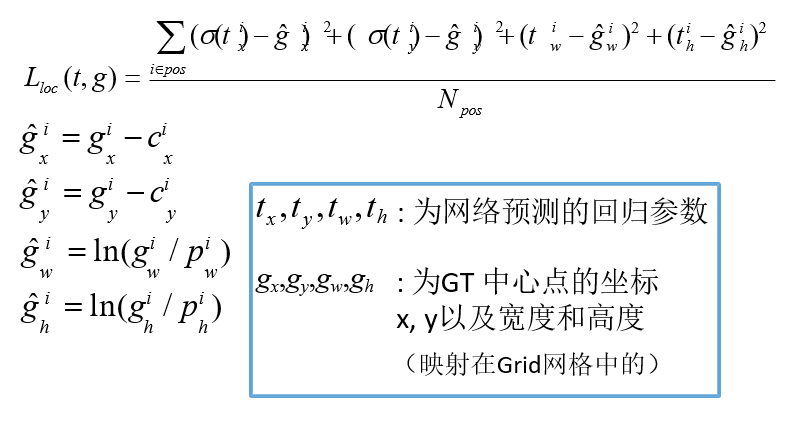
3.4.4 定位损失
3.5 YOLOv3 SPP

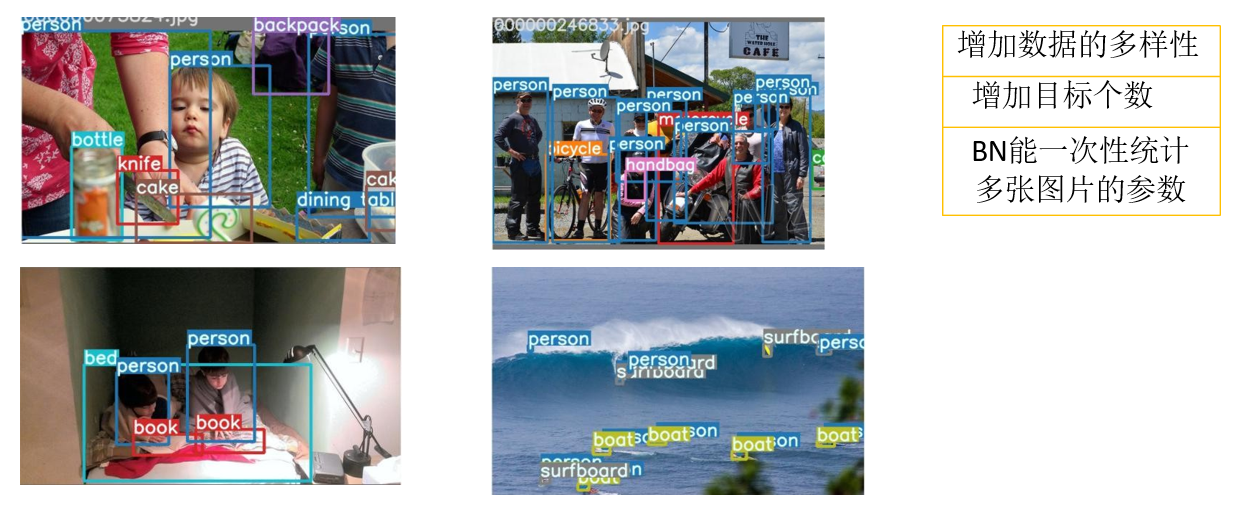
3.5.1 Mosaic图像增强
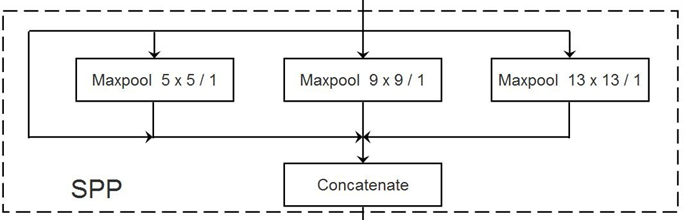
3.5.2 SPP模块
实现了不同尺度的特征融合。
注意:这里的SPP和SPPnet中的SPP结构不一样,Spatial Pyramid Pooling
-
相关阅读:
将毫秒数述转为时分秒格式
docker--redis容器部署及地理空间API的使用示例-II
搜索二维矩阵 II
js遍历数组(用forEach()方法)
互斥mutex与spinlock的对比
为什么要建独立站
猿创征文 | 大学生应该知道的开发工具
Linux .dhpcd导致cpu飙升问题
JPA+QueryDSL
计算机网络第五章——传输层(上)
- 原文地址:https://blog.csdn.net/March_A/article/details/130856604