-
永磁同步电机(PMSM)磁场定向控制(FOC)及Matlab/Simulink仿真分析
前言
做永磁同步电机控制绕不开FOC,本章节主要介绍FOC控制的基本原理,坐标变换以及永磁同步电机在同步旋转坐标系下的数学模型,并通过Matlab/Simulink进行永磁同步电机FOC控制算法的仿真分析。
一、FOC的基本原理
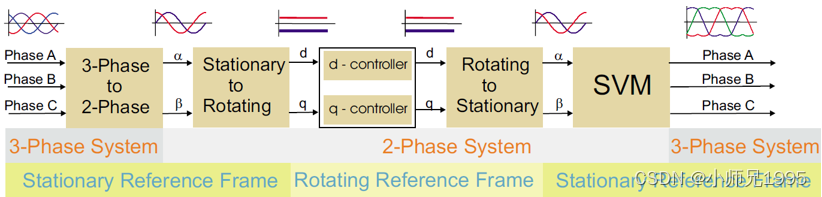
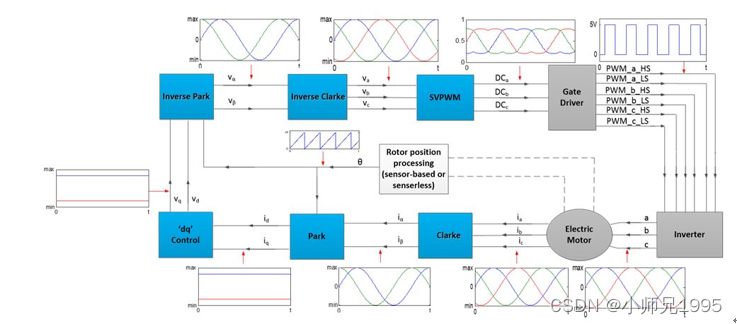
磁场定向控制(Field-Oriented Control,FOC)系统的基本思想是:通过坐标变换,在按转子磁场定向同步旋转坐标系中,得到等效的直流电动机模型,仿照直流电动机的控制方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量反变换得到三相坐标系的对应量,以实施控制,具体流程如下图所示:
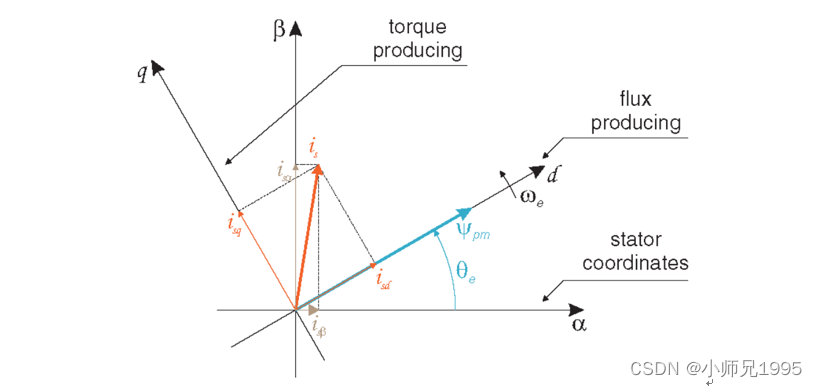
FOC最重要的原则是:按转子磁场定向,即保持转子磁链旋转矢量始终与dq坐标系下的d轴重合,q轴正交。通过按转子磁场定向,将定子电流解耦为了励磁分量 id和转矩分量 iq。通过电流 id实现对转子磁链的控制,电流 iq实现对电磁转矩的控制,类比于直流电机的控制。对于表贴式永磁同步电机SPM,一般设置励磁分量id =0,定子电流全部用于产生电磁转矩。
FOC最主要的任务就是:通过不停的观测转子角度,实现转子磁链定向,即保持转子磁链旋转矢量始终与dq坐标系下的d轴重合,q轴正交,dq坐标轴同转子磁链同步旋转。二、坐标变换
2.1.Clark坐标变换
静止坐标变换Clark变换:
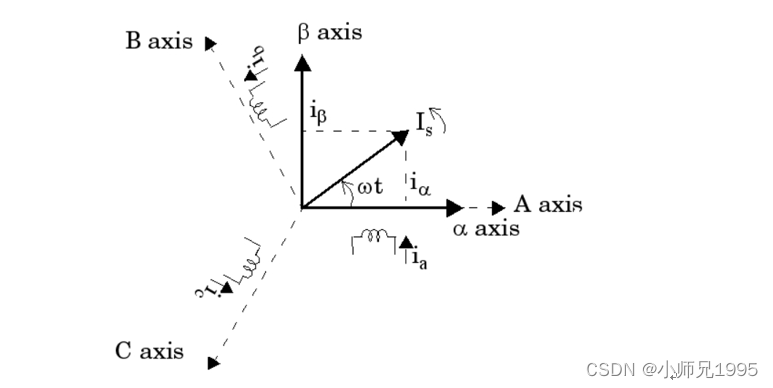
采用等幅值变换,通过下式将三相静止坐标系ABC下的电流转换为两相静止坐标系下的电流:
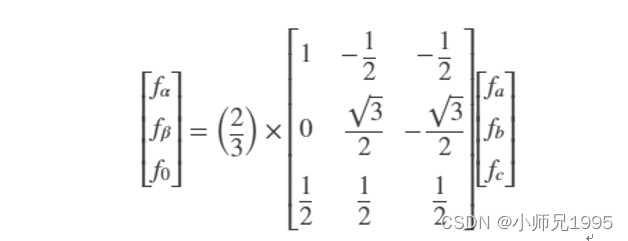

由于ia+ib+ic=0 ,因此实际中只需要三相静止坐标系下的两相电流即可,通过下式进行变换:

2.2.Park坐标变换
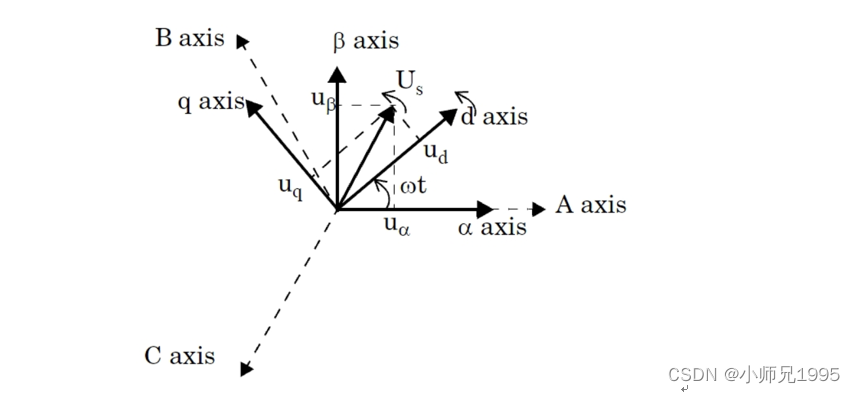
将两相静止坐标系下的电流转换为同步旋转坐标系dq下的电流,由下式所示:

三、永磁同步电机在同步旋转坐标系下的数学模型
将三相自然坐标系下的PMSM数学模型,通过坐标变换,转换为同步旋转坐标系下的数学模型。同步旋转坐标系的d轴与转子磁链对齐,并保持同步旋转,如下所示:
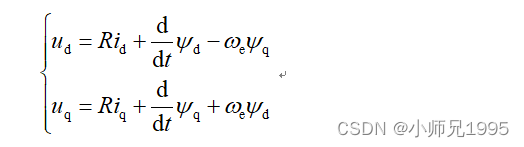
定子电压方程:
定子磁链方程:

电磁转矩方程:

运动方程:


将定子磁链方程带入电压方程可得定子电压方程为:

由上式,通过坐标变换将三相自然坐标系下的PMSM数学模型变换为同步旋转坐标系下的数学模型,使PMSM的数学模型实现了解耦,可仿照直流电机的控制方法对PMSM进行控制。FOC的整体控制框架如下图所示:
四、永磁同步电机磁场定向控制Matlab/Simulink仿真分析
4.1.电压开环控制

如上图所示,直接给定同步旋转坐标系下的Vd,Vq电压实现永磁同步电机磁场定向的电压开环控制。Matlab/Simulink整体仿真框图如下所示:

4.1.1.仿真电路分析
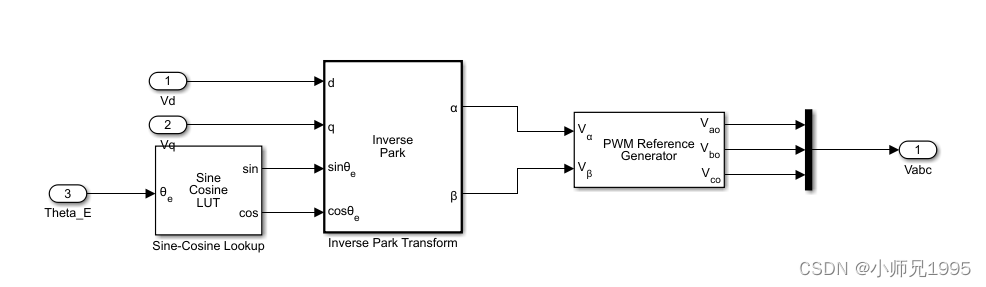
直接给定同步旋转坐标系下Vd,Vq的电压值实现永磁同步电机磁场定向的电压开环控制。
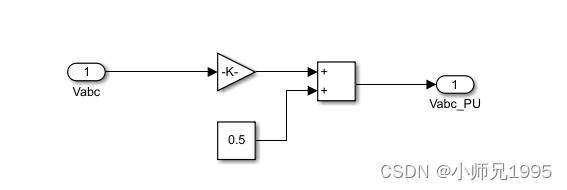
此处作了一个归一化处理,将FOC电压开环控制的输出电压范围设置在[0,1]之间。

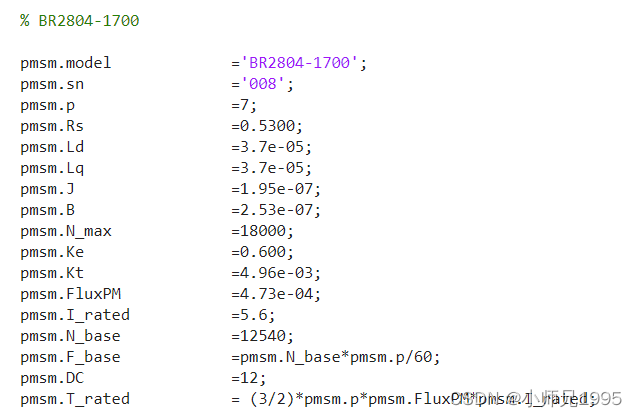
永磁同步电机采用BR2804-1700电机,参数如下:

4.1.2.仿真结果分析
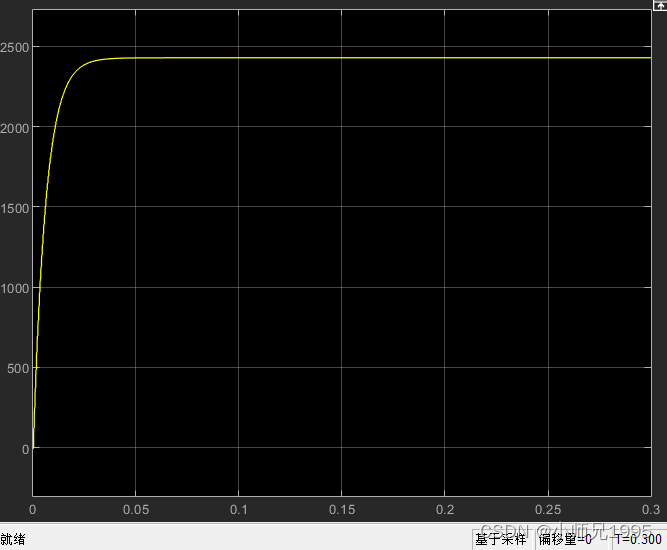
电机转速:
定子电流:
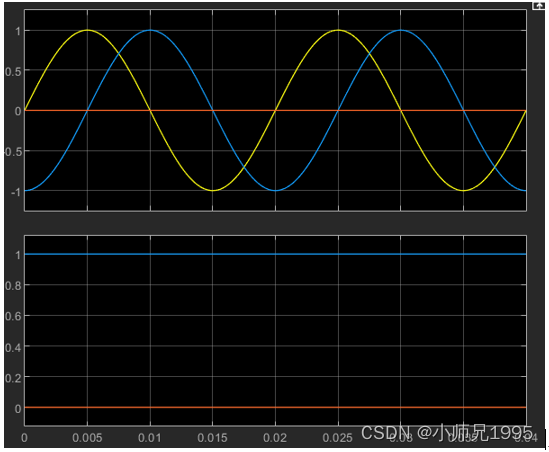
同步旋转坐标系下的定子电流Id、Iq:

同步旋转坐标系下的定子电压Vd、Vq:
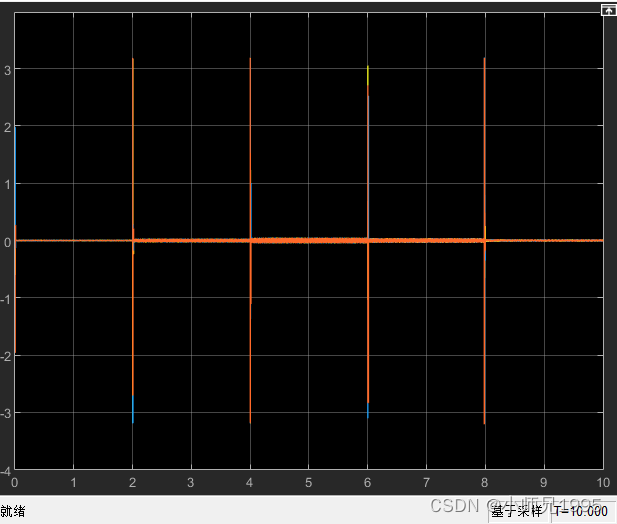
电磁转矩:

4.2.电流闭环控制

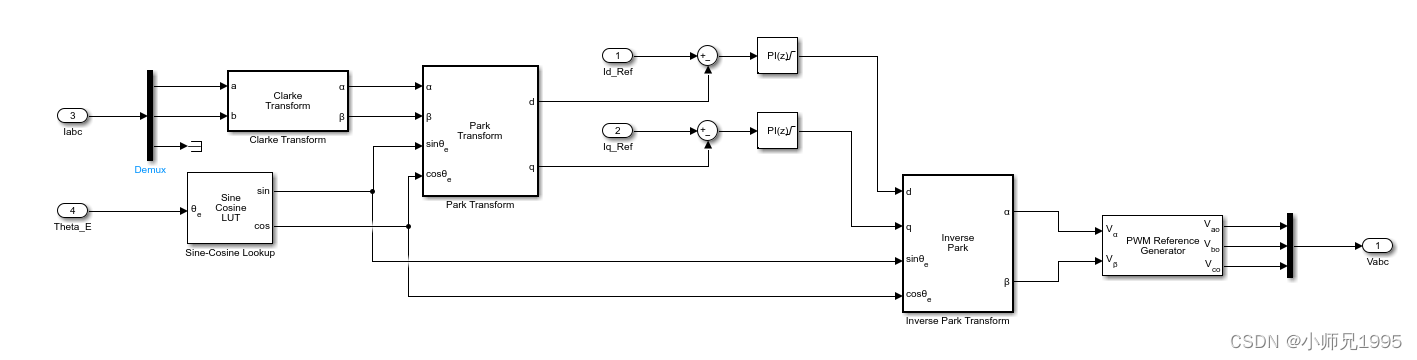
在电压开环控制中,同步旋转坐标系下的定子电流Id不等于0约为0.036,说明定子电流未完全用于产生电磁转矩。引入电流闭环控制,精确的控制电机Id、Iq电流值。电流环的主要作用是在电机启动过程中能够以最大的电流启动,同时对电网电压的波动起及时抗扰的作用,加快动态系统的响应速度,提高系统的稳定性,其控制框图如上图所示。永磁同步电机电流闭环控制的Matlab/Simulink整体仿真框图如下所示:
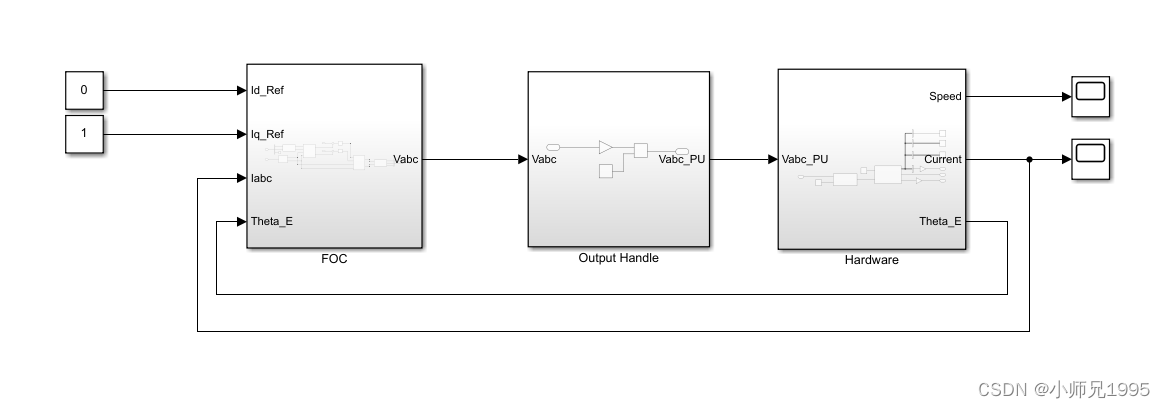
4.2.1.仿真电路分析
与电压开环控制的不同点就是将定子电流进行了反馈,设定同步旋转坐标下定子电流为Id_Ref、Iq_Ref,设定值与定子电流的反馈值Id、Iq进行PI控制,PI控制器的输出作为永磁同步电机的电压给定,驱动PMSM。
其余仿真部分同电压开环控制。4.2.2.仿真结果分析
电机转速:在0.1s左右达到了稳态转速

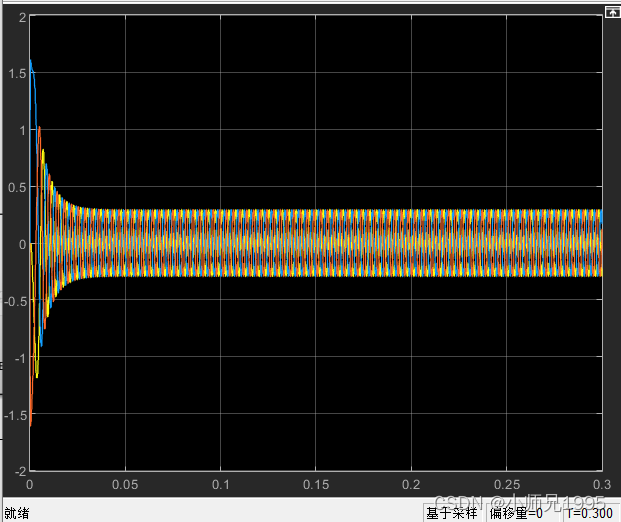
电机定子电流:

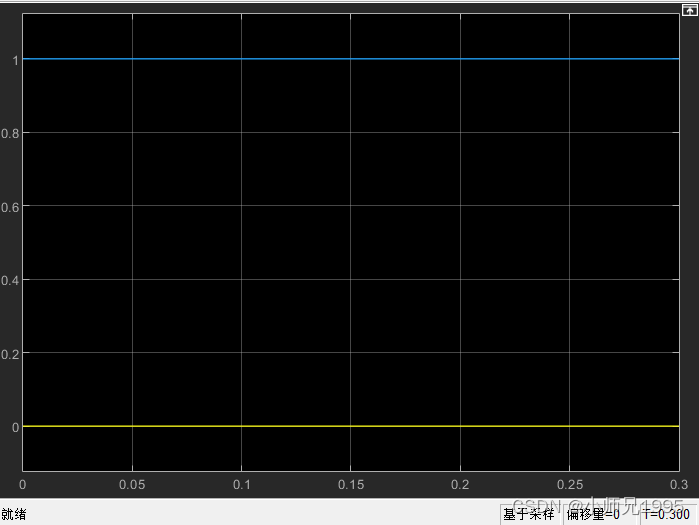
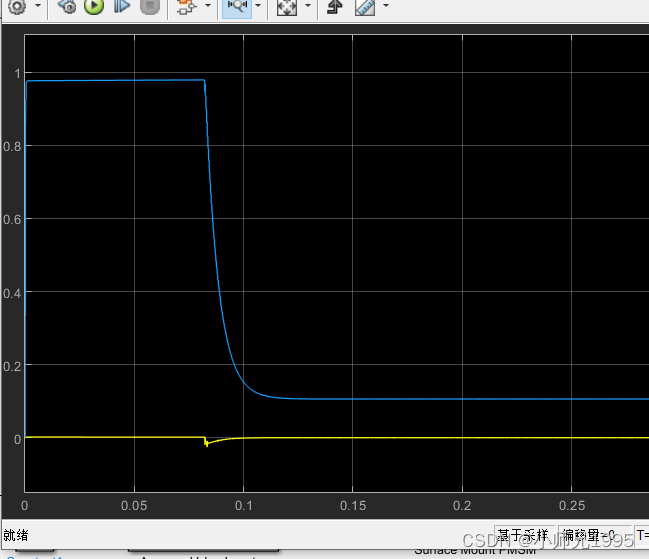
同步旋转坐标系下的定子电流Id、Iq:电机启动时以设定的最大电流1A进行启动,当转速达到稳态值时电流立即降了下来,实现了理想最优的启动过渡过程。
同步旋转坐标系下的定子电压:

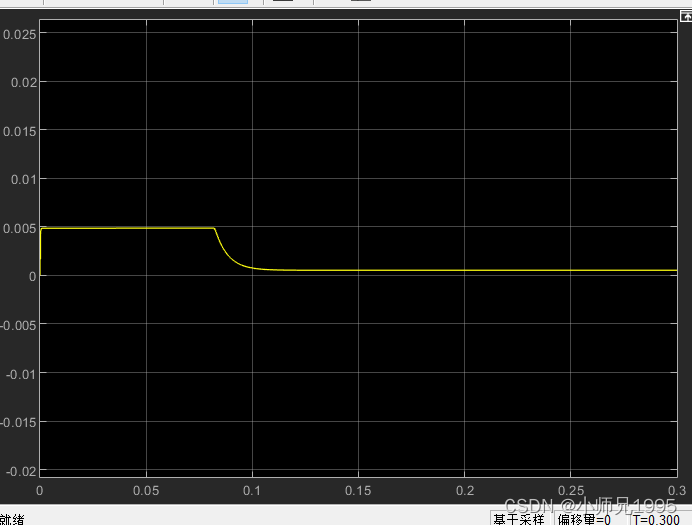
电磁转矩:
4.3.转速外环电流内环双闭环控制
在实际控制中我们一般关心转速的变化,期望电机以设定的转速进行变化,这时仅靠电流闭环不太能实现,加入转速闭环,实现对转速的控制。转速控制器的输出为电流控制器的给定,转速控制器的输出要进行限幅,因为转速控制器的输出限幅值决定了所用电机的最大允许电流。永磁同步电机转速外环电流内环双闭环控制的Matlab/Simulink整体仿真框图如下所示:
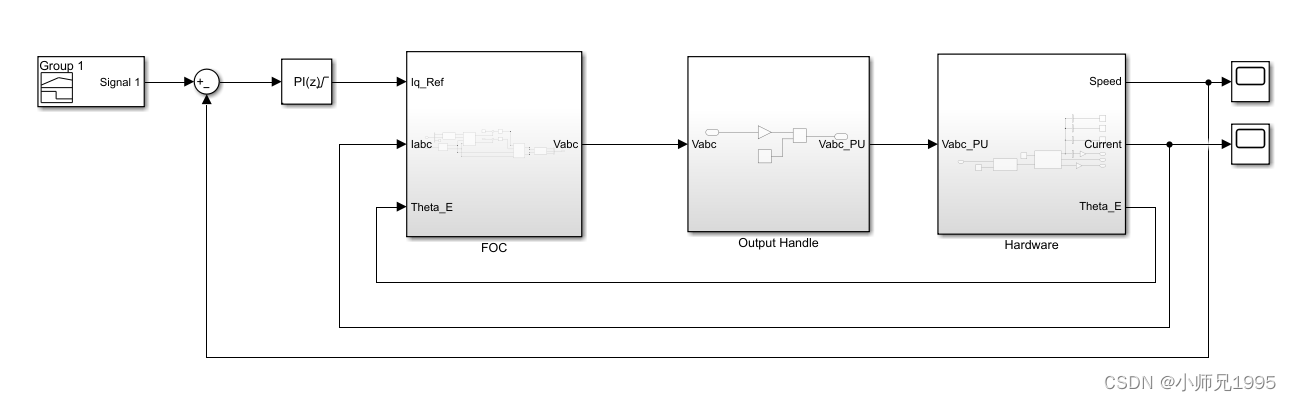
4.3.1.仿真电路分析
在电流闭环控制的基础上引入了转速闭环控制,转速控制器的输出作Iq电流的输入,构成转速外环电流内环双闭环控制系统。

4.3.2.仿真结果分析
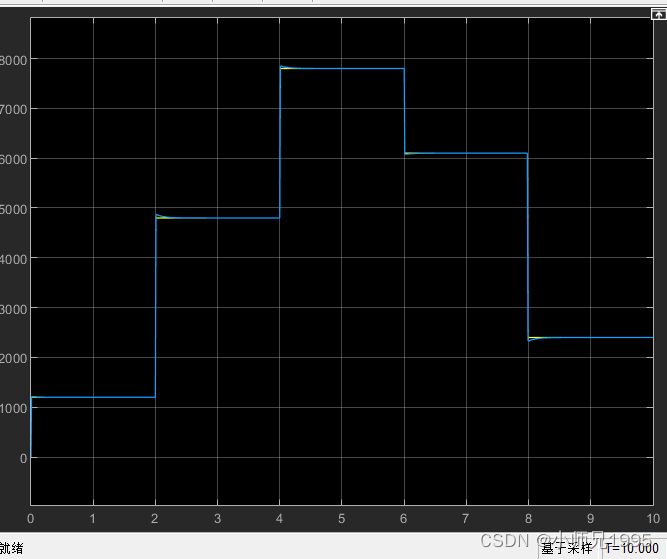
速度设定值:

电机转速:
电机定子电流:
同步旋转坐标系下的定子电流Id、Iq:

同步旋转坐标系下的定子电压:

电磁转矩:

五、小结
至此永磁同步电机FOC的基本原理及Matlab/Simulink的仿真部分就说完了。永磁同步电机的电压开环控制、电流闭环控制、转速外环电流内环双闭环控制与直流电机的控制思想一致,永磁同步电机通过坐标变换,转换到按转子磁场定向的同步旋转坐标系中,就是为了实现PMSM数学模型的解耦,将PMSM等效为一个他励“直流电机”,按直流电机的控制思想进行PMSM的控制。有关PID控制器的参数整定、SVPWM控制算法以及永磁同步电机磁场定向矢量控制的工程实现会在后续进行补充。
有关直流电机的Matlab/Simulink仿真分析请阅读:
直流有刷电机及Matlab/Simulink驱动仿真
直流有刷电机调速原理及Matlab/Simulink仿真
直流有刷电机转速、电流双闭环调速系统及Matlab/Simulink仿真分析
直流有刷电机H桥正反转调速原理及Matlab/Simulink仿真
总结
本章节介绍了FOC控制的基本原理,坐标变换以及永磁同步电机在同步旋转坐标系下的数学模型,并通过Matlab/Simulink进行了永磁同步电机FOC控制算法的仿真分析,包括电压开环控制、电流闭环控制、转速外环电流内环双闭环控制,为后续章节的分析奠定基础。
模型及代码工程获取:
-
相关阅读:
【精讲】Es6的数组的扩展方法,对象的扩展方法,字符串扩展方法,?. 对象层级深
LeetCode 1194.锦标赛优胜者
软断言你也学不会
列表初始化与右值引用
[附源码]Python计算机毕业设计Django贵港高铁站志愿者服务平台
关于前端的文件下载问题,通过超链接a无法自定义文件名
vue2 - 基于Export2Excel.js导出Excel案例(js-xlsx插件二次封装使用)
[ZJCTF 2019]Login--动态调试--详细版
RK3566 AI开发 Docker 环境搭建
初始MySQL
- 原文地址:https://blog.csdn.net/weixin_42650162/article/details/128193549