-
STM32定时器笔记
学习江科大自化协的stm32教程记录的笔记
一、TIM定时器
定时器可以对输入的时钟进行计数,并在计数值达到设定值时触发中断
例:stm32中定时器的基准时钟一般是72MHZ,【周期是频率的倒数1T = 1/72us】,如果计数72个,就是1us,计数72000个,就是1ms
16位计数器、预分频器、自动重装寄存器的时基单元,在72MHz计数时钟下可以实现最大59.65s的定时
计数器:进行计数的寄存器,每来一个时钟,计数器加一
预分频器:对计数器时钟进行分频
自动重装寄存器:计数器的目标值,设定计多少数申请中断
216=65536 预分频器和自动重装寄存器设置最大,定时器时间最大为59.65s【1/(72MHZ/65536*65536)】
不仅具备基本的定时中断功能,而且还包含内外时钟源选择、输入捕获、输出比较、编码器接口、主从触发模式等多种功能
根据复杂度和应用场景分为了高级定时器、通用定时器、基本定时器三种类型
二、定时器类型
类型 编号 总线 功能 高级定时器 TIM1、TIM8 APB2 拥有通用定时器全部功能,并额外具有重复计数器、死区生成、互补输出、刹车输入等功能 通用定时器 TIM2、TIM3、TIM4、TIM5 APB1 拥有基本定时器全部功能,并额外具有内外时钟源选择、输入捕获、输出比较、编码器接口、主从触发模式等功能 基本定时器 TIM6、TIM7 APB1 拥有定时中断、主模式触发DAC的功能 STM32F103C8T6定时器资源:TIM1、TIM2、TIM3、TIM4
2.1基本定时器
TIM6和TIM7定时器的主要功能包括:
-
16位自动重装载累加计数器
-
16位可编程(可实时修改)预分频器,用于对输入的时钟按系数为1~65536之间的任意数值分频
-
触发DAC的同步电路
-
在更新事件(计数器溢出)时产生中断/DMA请求

2.1.1分频的作用
便于计算,计时更加精确
- 以12MHZ为例:
- 不分频
一个时钟周期为 T = 1/12 us,如果我们需要1us,需要12T,这个很好理解吧,但是我们使用的时候经常是要以秒(s)微秒(ms)进行计时的,当我们需要1ms的时候,我们就需要计数12000T,这个数是已经很大了 - 12分频
12分频后,12MHZ变为1MHZ,一个时钟周期为 T = 1/1 us = 1us,如果我们需要1us,需要1T;需要1ms时,只需要1000T
- 不分频
我们很清楚的看到分频以后,计一次数就是1us,这不但利用我们去计算定时时间,而且计算的次数明显减少了,那么为什么说计数次数减少就可以提高精度呢?可以想一下平时使用的钟表,当我们使用的时间长了,表就会不太准,时钟也是一样,我们计数次数多了,难免会产生误差,一次两次小误差肯能影响不大,但是成千上百次误差的影响那可就大了
定时时间更长
- 以72MHZ为例
- 不分频
一个时钟周期为 T = 1/72 us,16位定时器的范围是0~65535,那么一个范围计数完成的时间大概是0.94ms - 3分频
3分频后,72MHZ变为24MHZ,一个时钟周期为 T = 1/24 us ,那么一个范围计数完成的时间大概是2.73ms - 72分频
72MHZ变为1MHZ,一个时钟周期为 T =1 us ,那么一个范围计数完成的时间大概是65.5ms
- 不分频
由于分频以后,到达同一个计数时间的计数次数减少,所以在16位的定时器范围内,定时器的定时时间最大值增加【定时器计数最大值是不可改变的,216,所以我们只能改变频率来改变计数最大时间】
2.1.2预分频器
预分频可以以系数介于1至65536之间的任意数值对计数器时钟分频。它是通过一个16位寄存器(TIMx_PSC)的计数实现分频。因为TIMx_PSC控制寄存器具有缓冲,可以在运行过程中改变它的数值,新的预分频数值将在下一个更新事件时起作用
实际分频数 = 分频器的值 + 1
计数器计数频率:CK_CNT = CK_PSC / (PSC + 1)

缓冲器(也叫作影子寄存器),是实际起作用的寄存器。比如:在计数过程中突然改变分频系数,那么一个周期前半部分和后半部分的频率就会不一致,这可能会产生一些不好的影响。但是加上缓冲器后,改变分频系数并不会立即改变这一个周期的频率,它会等到这个周期结束后,产生更新事件,才会去改变,这样就保证了stm32的严谨性2.1.3计数模式

计数器溢出频率:CK_CNT_OV = CK_CNT / (ARR + 1) = CK_PSC / (PSC + 1) / (ARR + 1)计数器使用影子寄存器 和 计数器不使用影子寄存器

2.1.4主模式触发DAC功能
当我们使用DAC时,需要每隔一段时间都要输出一段波形,按正常思路来说,我们要使用中断,每隔一段时间调用一次中断里面的代码,实现DAC转换。但是频繁调用中断会影响到主程序的进行,阻碍其他中断的进行
如果我们使用主模式的话,就可以把定时器的更新事件映射到触发输出TRGO,然后将TRGO接到DAC触发转换引脚上,这样就不需要更新中断来实现DAC转换了。整个过程不需要软件的参与,实现了硬件的自动化

2.2通用定时器
通用TIMx (TIM2、TIM3、TIM4和TIM5)定时器功能包括:
-
16位向上、向下、向上/向下自动装载计数器
-
16位可编程(可以实时修改)预分频器,计数器时钟频率的分频系数为1~65536之间的任意数值
-
4个独立通道: ─ 输入捕获 ─ 输出比较 ─ PWM生成(边缘或中间对齐模式) ─ 单脉冲模式输出
-
使用外部信号控制定时器和定时器互连的同步电路
-
如下事件发生时产生中断/DMA:
- ─ 更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发)
- ─ 触发事件(计数器启动、停止、初始化或者由内部/外部触发计数)
- ─ 输入捕获
- ─ 输出比较
-
支持针对定位的增量(正交)编码器和霍尔传感器电路
-
触发输入作为外部时钟或者按周期的电流管理


2.2.1计数模式
向上计数模式、向下计数模式、中央对齐模式(向上/向下计数)

向上计数模式:每次+1,加到目标值,申请中断,归零向下计数模式:每次-1,减到目标值,申请中断,归起始值
中央对齐模式(向上/向下计数):每次+1,加到目标值,申请中断;之后每次-1,减到起始值,申请中断
2.3高级定时器

三、定时中断基本结构

使用中断输出控制的原因:
定时器模块中很多地方都要申请中断,定时器图中的向上折的箭头都表示要申请中断,所以需要控制这些中断,如果需要就允许,不需要就不允许时钟树

如果不改变SystemInit里面的配置,三种定时器中内部基准时钟均为72MHZ实例一、定时中断和内外部时钟代码实现
1.1、定时中断
功能实现:每隔1S计数一次
注意:需要手动清除中断初始化时产生的中断标记,不然默认其实值为1,而不是0
timer.c
#include "stm32f10x.h" // Device header void Timer_Init(void){ //开启时钟,TIM2是APB1的时钟外设 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //选择时基单元的时钟,可以不选,默认上电后选择内部时钟 TIM_InternalClockConfig(TIM2); //配置时基单元 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//指定时钟分频 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//计数器模式 TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1;//ARR自动重装器的值 TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1;//PSC预分频器的值 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器的值,高级定时器使用 TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure); //手动清除中断标志位,避免刚初始化完就进入中断 TIM_ClearFlag(TIM2,TIM_IT_Update); //使能中断 TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE); //配置NVIC NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); NVIC_InitTypeDef NVIC_InitStructure; NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_Init(&NVIC_InitStructure); //启动定时器 TIM_Cmd(TIM2,ENABLE); } //void TIM2_IRQHandler(void){ // //判断中断 // if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET){ // // //清除中断标志位 // TIM_ClearITPendingBit(TIM2,TIM_IT_Update); // } //}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
timer.h
#ifndef __TIMER_H__ #define __TIMER_H__ void Timer_Init(void); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
main.c
#include "stm32f10x.h" // Device header #include "OLED.h" #include "Timer.h" uint16_t num = 0; int main(){ OLED_Init(); Timer_Init(); OLED_ShowString(1,1,"Num:"); while(1){ OLED_ShowNum(1,5,num,5); //OLED_ShowNum(2,1,TIM_GetCounter(TIM2),5); } } void TIM2_IRQHandler(void){ //判断中断 if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET){ num++; //清除中断标志位 TIM_ClearITPendingBit(TIM2,TIM_IT_Update); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
OLED.c
#include "stm32f10x.h" #include "OLED_Font.h" /*引脚配置*/ #define OLED_W_SCL(x) GPIO_WriteBit(GPIOB, GPIO_Pin_8, (BitAction)(x)) #define OLED_W_SDA(x) GPIO_WriteBit(GPIOB, GPIO_Pin_9, (BitAction)(x)) /*引脚初始化*/ void OLED_I2C_Init(void) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; GPIO_Init(GPIOB, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_Init(GPIOB, &GPIO_InitStructure); OLED_W_SCL(1); OLED_W_SDA(1); } /** * @brief I2C开始 * @param 无 * @retval 无 */ void OLED_I2C_Start(void) { OLED_W_SDA(1); OLED_W_SCL(1); OLED_W_SDA(0); OLED_W_SCL(0); } /** * @brief I2C停止 * @param 无 * @retval 无 */ void OLED_I2C_Stop(void) { OLED_W_SDA(0); OLED_W_SCL(1); OLED_W_SDA(1); } /** * @brief I2C发送一个字节 * @param Byte 要发送的一个字节 * @retval 无 */ void OLED_I2C_SendByte(uint8_t Byte) { uint8_t i; for (i = 0; i < 8; i++) { OLED_W_SDA(Byte & (0x80 >> i)); OLED_W_SCL(1); OLED_W_SCL(0); } OLED_W_SCL(1); //额外的一个时钟,不处理应答信号 OLED_W_SCL(0); } /** * @brief OLED写命令 * @param Command 要写入的命令 * @retval 无 */ void OLED_WriteCommand(uint8_t Command) { OLED_I2C_Start(); OLED_I2C_SendByte(0x78); //从机地址 OLED_I2C_SendByte(0x00); //写命令 OLED_I2C_SendByte(Command); OLED_I2C_Stop(); } /** * @brief OLED写数据 * @param Data 要写入的数据 * @retval 无 */ void OLED_WriteData(uint8_t Data) { OLED_I2C_Start(); OLED_I2C_SendByte(0x78); //从机地址 OLED_I2C_SendByte(0x40); //写数据 OLED_I2C_SendByte(Data); OLED_I2C_Stop(); } /** * @brief OLED设置光标位置 * @param Y 以左上角为原点,向下方向的坐标,范围:0~7 * @param X 以左上角为原点,向右方向的坐标,范围:0~127 * @retval 无 */ void OLED_SetCursor(uint8_t Y, uint8_t X) { OLED_WriteCommand(0xB0 | Y); //设置Y位置 OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); //设置X位置高4位 OLED_WriteCommand(0x00 | (X & 0x0F)); //设置X位置低4位 } /** * @brief OLED清屏 * @param 无 * @retval 无 */ void OLED_Clear(void) { uint8_t i, j; for (j = 0; j < 8; j++) { OLED_SetCursor(j, 0); for(i = 0; i < 128; i++) { OLED_WriteData(0x00); } } } /** * @brief OLED显示一个字符 * @param Line 行位置,范围:1~4 * @param Column 列位置,范围:1~16 * @param Char 要显示的一个字符,范围:ASCII可见字符 * @retval 无 */ void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char) { uint8_t i; OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //设置光标位置在上半部分 for (i = 0; i < 8; i++) { OLED_WriteData(OLED_F8x16[Char - ' '][i]); //显示上半部分内容 } OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //设置光标位置在下半部分 for (i = 0; i < 8; i++) { OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); //显示下半部分内容 } } /** * @brief OLED显示字符串 * @param Line 起始行位置,范围:1~4 * @param Column 起始列位置,范围:1~16 * @param String 要显示的字符串,范围:ASCII可见字符 * @retval 无 */ void OLED_ShowString(uint8_t Line, uint8_t Column, char *String) { uint8_t i; for (i = 0; String[i] != '\0'; i++) { OLED_ShowChar(Line, Column + i, String[i]); } } /** * @brief OLED次方函数 * @retval 返回值等于X的Y次方 */ uint32_t OLED_Pow(uint32_t X, uint32_t Y) { uint32_t Result = 1; while (Y--) { Result *= X; } return Result; } /** * @brief OLED显示数字(十进制,正数) * @param Line 起始行位置,范围:1~4 * @param Column 起始列位置,范围:1~16 * @param Number 要显示的数字,范围:0~4294967295 * @param Length 要显示数字的长度,范围:1~10 * @retval 无 */ void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length) { uint8_t i; for (i = 0; i < Length; i++) { OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0'); } } /** * @brief OLED显示数字(十进制,带符号数) * @param Line 起始行位置,范围:1~4 * @param Column 起始列位置,范围:1~16 * @param Number 要显示的数字,范围:-2147483648~2147483647 * @param Length 要显示数字的长度,范围:1~10 * @retval 无 */ void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length) { uint8_t i; uint32_t Number1; if (Number >= 0) { OLED_ShowChar(Line, Column, '+'); Number1 = Number; } else { OLED_ShowChar(Line, Column, '-'); Number1 = -Number; } for (i = 0; i < Length; i++) { OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0'); } } /** * @brief OLED显示数字(十六进制,正数) * @param Line 起始行位置,范围:1~4 * @param Column 起始列位置,范围:1~16 * @param Number 要显示的数字,范围:0~0xFFFFFFFF * @param Length 要显示数字的长度,范围:1~8 * @retval 无 */ void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length) { uint8_t i, SingleNumber; for (i = 0; i < Length; i++) { SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16; if (SingleNumber < 10) { OLED_ShowChar(Line, Column + i, SingleNumber + '0'); } else { OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A'); } } } /** * @brief OLED显示数字(二进制,正数) * @param Line 起始行位置,范围:1~4 * @param Column 起始列位置,范围:1~16 * @param Number 要显示的数字,范围:0~1111 1111 1111 1111 * @param Length 要显示数字的长度,范围:1~16 * @retval 无 */ void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length) { uint8_t i; for (i = 0; i < Length; i++) { OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0'); } } /** * @brief OLED初始化 * @param 无 * @retval 无 */ void OLED_Init(void) { uint32_t i, j; for (i = 0; i < 1000; i++) //上电延时 { for (j = 0; j < 1000; j++); } OLED_I2C_Init(); //端口初始化 OLED_WriteCommand(0xAE); //关闭显示 OLED_WriteCommand(0xD5); //设置显示时钟分频比/振荡器频率 OLED_WriteCommand(0x80); OLED_WriteCommand(0xA8); //设置多路复用率 OLED_WriteCommand(0x3F); OLED_WriteCommand(0xD3); //设置显示偏移 OLED_WriteCommand(0x00); OLED_WriteCommand(0x40); //设置显示开始行 OLED_WriteCommand(0xA1); //设置左右方向,0xA1正常 0xA0左右反置 OLED_WriteCommand(0xC8); //设置上下方向,0xC8正常 0xC0上下反置 OLED_WriteCommand(0xDA); //设置COM引脚硬件配置 OLED_WriteCommand(0x12); OLED_WriteCommand(0x81); //设置对比度控制 OLED_WriteCommand(0xCF); OLED_WriteCommand(0xD9); //设置预充电周期 OLED_WriteCommand(0xF1); OLED_WriteCommand(0xDB); //设置VCOMH取消选择级别 OLED_WriteCommand(0x30); OLED_WriteCommand(0xA4); //设置整个显示打开/关闭 OLED_WriteCommand(0xA6); //设置正常/倒转显示 OLED_WriteCommand(0x8D); //设置充电泵 OLED_WriteCommand(0x14); OLED_WriteCommand(0xAF); //开启显示 OLED_Clear(); //OLED清屏 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
OLED.h
#ifndef __OLED_H #define __OLED_H void OLED_Init(void); void OLED_Clear(void); void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char); void OLED_ShowString(uint8_t Line, uint8_t Column, char *String); void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length); void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length); void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length); void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
1.2、外部时钟
功能实现:每遮挡一次计数器+1
注意:如果出现遮挡一次跳跃好多次,需要添加滤波
timer.c
#include "stm32f10x.h" // Device header void Timer_Init(void){ //开启时钟,TIM2是APB1的时钟外设 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //配置GPIO RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); //选择外部时钟 TIM_ETRClockMode2Config(TIM2,TIM_ExtTRGPSC_OFF,TIM_ExtTRGPolarity_NonInverted,0x0f);//这里要添加滤波,不然会跳好多次 //配置时基单元 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//指定时钟分频 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//计数器模式 TIM_TimeBaseInitStructure.TIM_Period = 10 - 1;//ARR自动重装器的值 TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1;//PSC预分频器的值 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器的值,高级定时器使用 TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure); //手动清除中断标志位,避免刚初始化完就进入中断 TIM_ClearFlag(TIM2,TIM_IT_Update); //使能中断 TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE); //配置NVIC NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); NVIC_InitTypeDef NVIC_InitStructure; NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_Init(&NVIC_InitStructure); //启动定时器 TIM_Cmd(TIM2,ENABLE); } uint16_t Timer_GetCount(void){ return TIM_GetCounter(TIM2); } //void TIM2_IRQHandler(void){ // //判断中断 // if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET){ // // //清除中断标志位 // TIM_ClearITPendingBit(TIM2,TIM_IT_Update); // } //}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
timer.h
#ifndef __TIMER_H__ #define __TIMER_H__ void Timer_Init(void); uint16_t Timer_GetCount(void); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
main.c
#include "stm32f10x.h" // Device header #include "OLED.h" #include "Timer.h" uint16_t num = 0; int main(){ OLED_Init(); Timer_Init(); OLED_ShowString(1,1,"Num:"); OLED_ShowString(2,1,"CNT:"); while(1){ OLED_ShowNum(1,5,num,5); OLED_ShowNum(2,5,Timer_GetCount(),5); } } void TIM2_IRQHandler(void){ //判断中断 if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET){ num++; //清除中断标志位 TIM_ClearITPendingBit(TIM2,TIM_IT_Update); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
四、TIM输出比较
OC(Output Compare)输出比较
输出比较可以通过比较CNT与CCR寄存器值的关系,来对输出电平进行置1、置0或翻转的操作,用于输出一定频率和占空比的PWM波形
CCR是输出比较寄存器
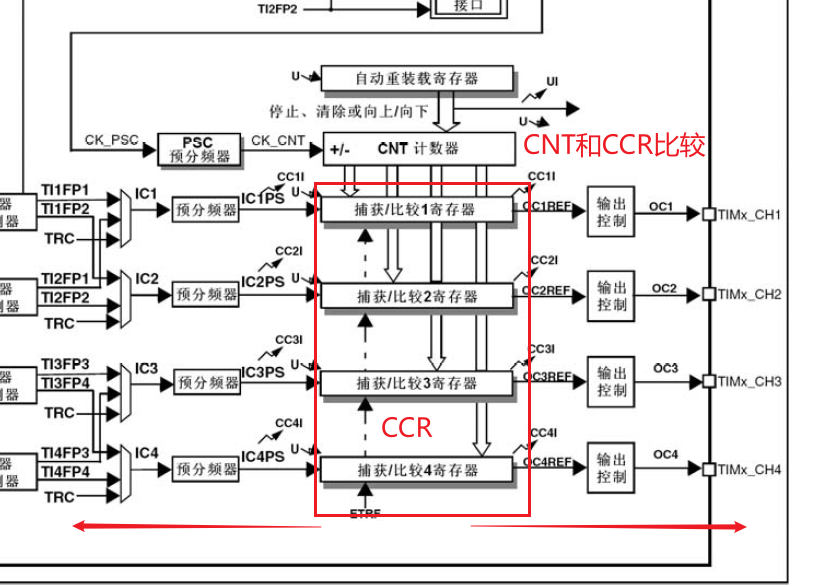
每个高级定时器和通用定时器都拥有4个输出比较通道
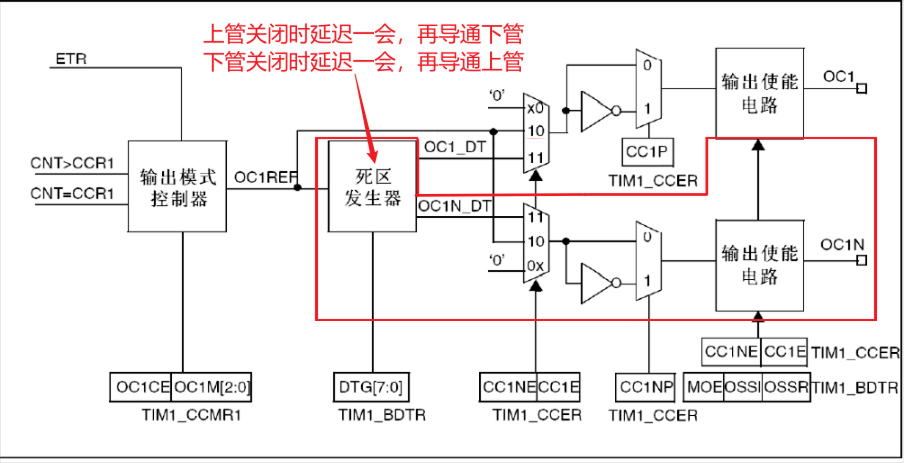
高级定时器的前3个通道额外拥有死区生成和互补输出的功能
4.1、PWM简介
PWM(Pulse Width Modulation)脉冲宽度调制
在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速等领域
PWM参数:频率 = 1 / TS **占空比 **= TON / TS 分辨率 = 占空比变化步距
占空比越大,模拟出的电压越趋近于高电平,占空比越小,模拟出的电压越趋近于低电平

4.2、输出比较通道
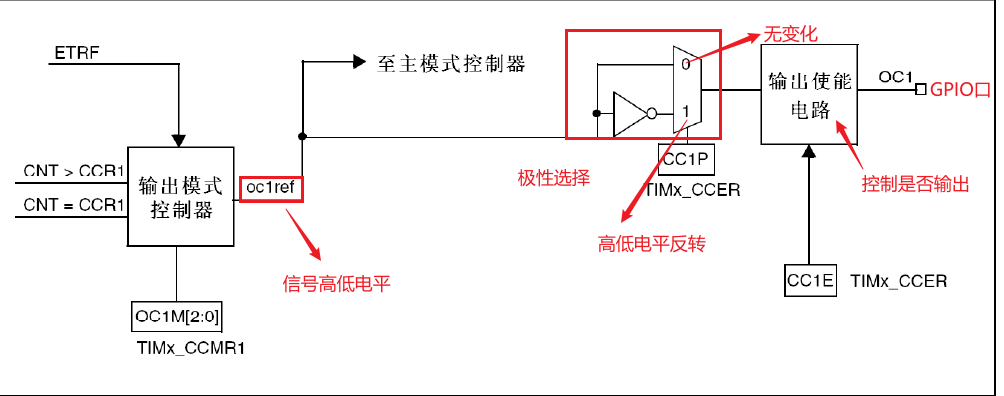
4.2.1输出比较通道(通用定时器)
4.2.2输出比较通道(高级定时器)
4.3 输出比较模式

4.4PWM基本结构
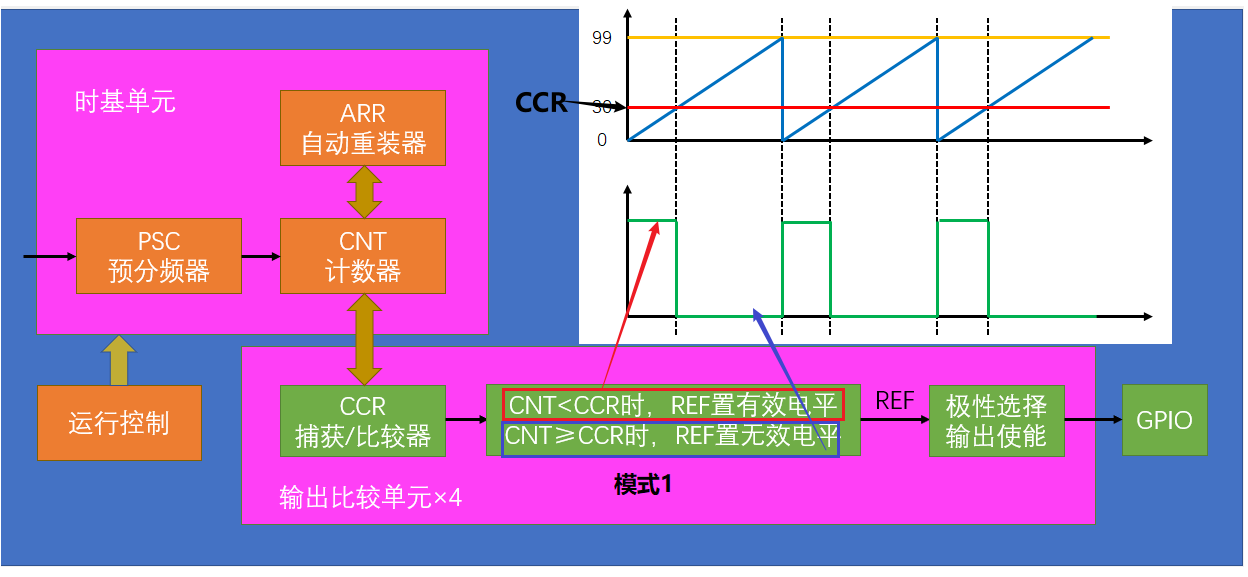
PWM频率: Freq = { CK_PSC / (PSC + 1) } / (ARR + 1)
PWM的频率=计数器更新频率
PWM占空比: Duty = CCR / (ARR + 1)
PWM分辨率: Reso = 1 / (ARR + 1)
分辨率定义为占空比最小的变化步距,占空比变化的越细腻越好
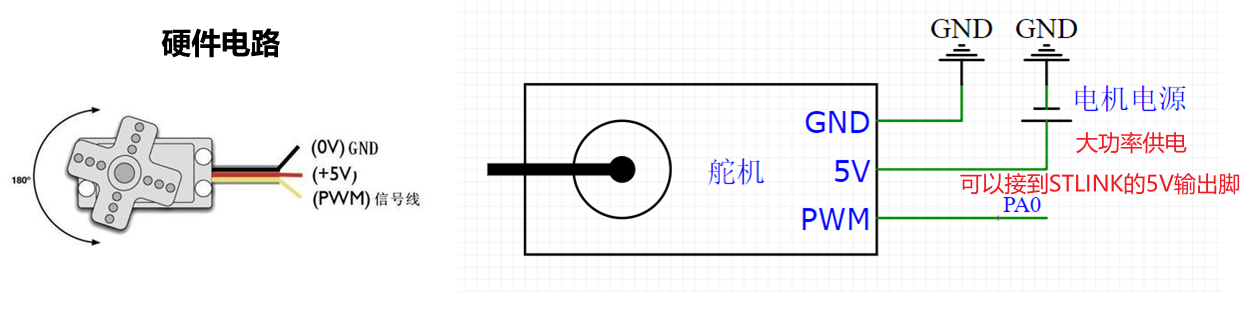
五、舵机
舵机是一种根据输入PWM信号占空比来控制输出角度的装置
输入PWM信号要求:周期为20ms,高电平宽度为0.5ms~2.5ms
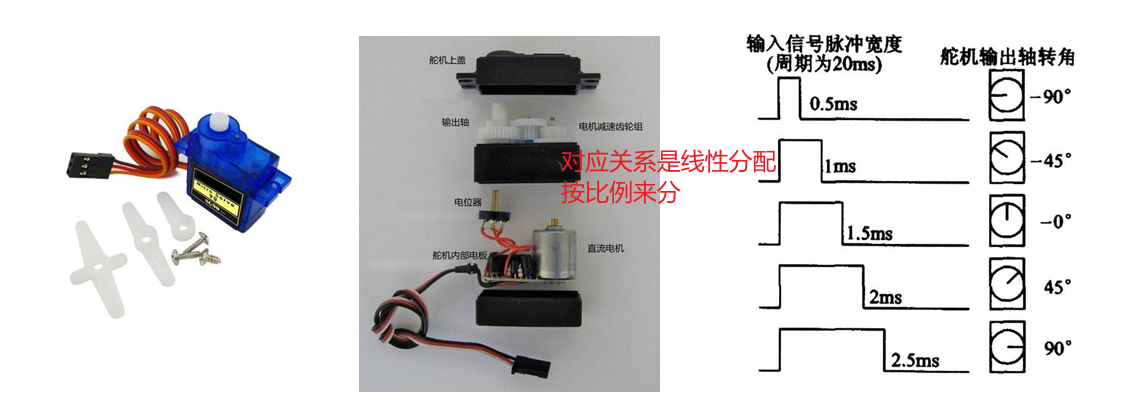
在这里,PWM当做通讯协议使用,不是PWM等效一个模拟输出
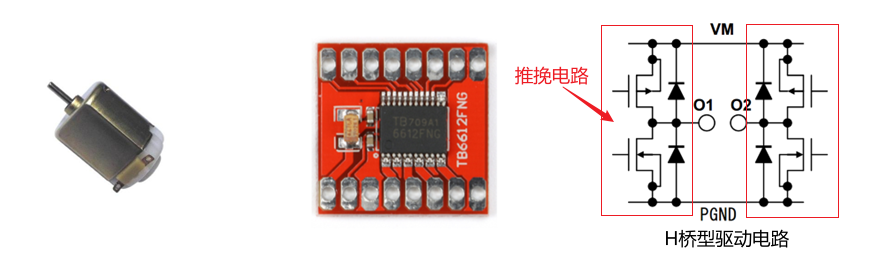
六、直流电机
直流电机是一种将电能转换为机械能的装置,有两个电极,当电极正接时,电机正转,当电极反接时,电机反转
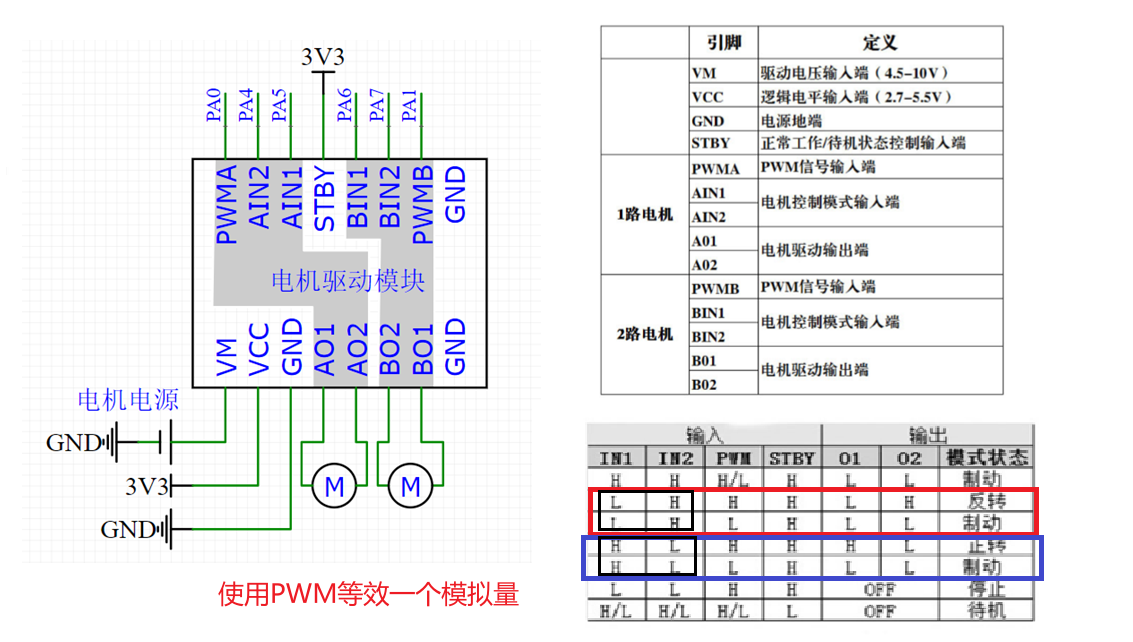
直流电机属于大功率器件,GPIO口无法直接驱动,需要配合电机驱动电路来操作
TB6612是一款双路H桥型的直流电机驱动芯片,可以驱动两个直流电机并且控制其转速和方向
实例二、PWM驱动呼吸灯&舵机&直流电机代码实现
2.1、PWM驱动LED呼吸灯
功能实现 :LED实现呼吸效果
注意:这里用过改变CCR的值来改变占空,比达到呼吸效果;但是占空比的值是有CCR和ARR+1共同决定的
PWM.c
#include "stm32f10x.h" // Device header void PWM_Init(void){ //开启时钟,TIM2是APB1的时钟外设 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //配置GPIO RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); //选择时基单元的时钟,可以不选,默认上电后选择内部时钟 TIM_InternalClockConfig(TIM2); //配置时基单元 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//指定时钟分频 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//计数器模式 TIM_TimeBaseInitStructure.TIM_Period = 100 - 1;//ARR自动重装器的值 TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1;//PSC预分频器的值 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器的值,高级定时器使用 TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure); //初始化输出比较单元 TIM_OCInitTypeDef TIM_OCInitStructure; //不论是否使用,都先赋一个初值,避免出现奇奇怪怪的错误。赋值后再更改需要的参数即可 TIM_OCStructInit(&TIM_OCInitStructure);//结构体赋初始值 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//设置输出比较模式 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//设置输出比较极性 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//设置输出使能 TIM_OCInitStructure.TIM_Pulse = 0; //设置CCR TIM_OC1Init(TIM2, &TIM_OCInitStructure); //启动定时器 TIM_Cmd(TIM2,ENABLE); } void PWM_SetCompare1(uint16_t Compare) { TIM_SetCompare1(TIM2, Compare); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
PWM.h
#ifndef __PWM_H__ #define __PWM_H__ void PWM_Init(void); void PWM_SetCompare1(uint16_t Compare); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
main.c
#include "stm32f10x.h" // Device header #include "Delay.h" #include "PWM.h" #include "OLED.h" uint8_t i; int main(){ OLED_Init(); PWM_Init(); while(1){ for(i = 0; i< 100; i++){ PWM_SetCompare1(i); Delay_ms(10); } for(i = 0; i< 100; i++){ PWM_SetCompare1(100-i); Delay_ms(10); } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
Delay.c
#include "stm32f10x.h" /** * @brief 微秒级延时 * @param xus 延时时长,范围:0~233015 * @retval 无 */ void Delay_us(uint32_t xus) { SysTick->LOAD = 72 * xus; //设置定时器重装值 SysTick->VAL = 0x00; //清空当前计数值 SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器 while(!(SysTick->CTRL & 0x00010000)); //等待计数到0 SysTick->CTRL = 0x00000004; //关闭定时器 } /** * @brief 毫秒级延时 * @param xms 延时时长,范围:0~4294967295 * @retval 无 */ void Delay_ms(uint32_t xms) { while(xms--) { Delay_us(1000); } } /** * @brief 秒级延时 * @param xs 延时时长,范围:0~4294967295 * @retval 无 */ void Delay_s(uint32_t xs) { while(xs--) { Delay_ms(1000); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
Delay.h
#ifndef __DELAY_H #define __DELAY_H void Delay_us(uint32_t us); void Delay_ms(uint32_t ms); void Delay_s(uint32_t s); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
拓展:keil5自带示波器使用
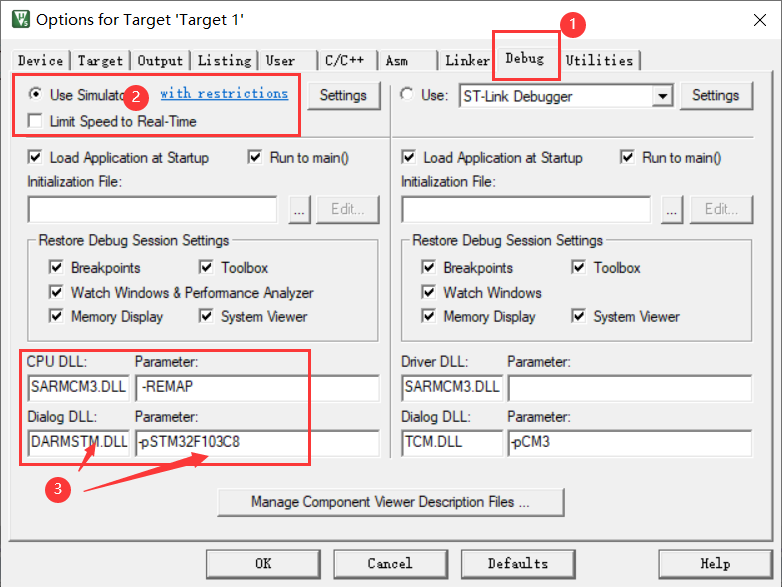
1.点击魔术棒

2.进入Debug
先设置为Use Simulator,然后去设置Dialog DLL和其后面的Parameter.
其中将Dialog DLL设置为:DARMSTM.DLL
Parameter设置为-p单片机型号
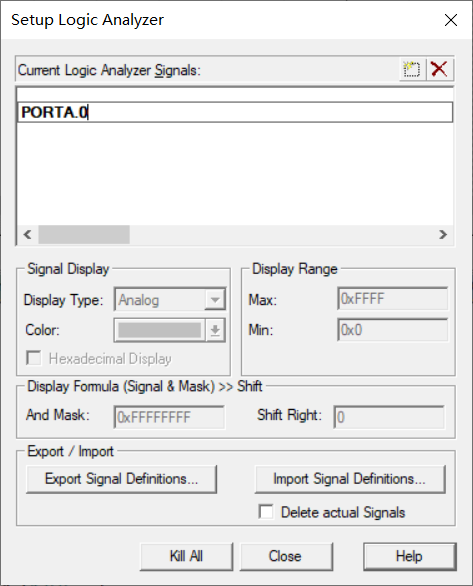
3.进入调试模式,调出示波器

4.点击Setup设置仿真端口
在里面加入要查看的端口,格式为PORTX.Y【X为A,B,C…;Y为1,2,3,…】

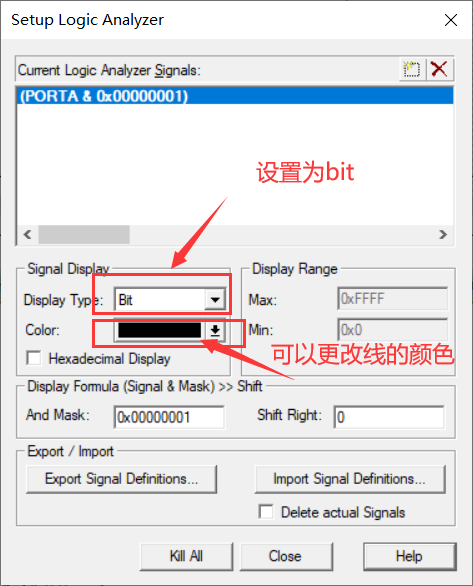
5.查看仿真效果

2.2、PWM驱动舵机
功能实现:通过按键控制舵机旋转角度
PWM.c
#include "stm32f10x.h" // Device header void PWM_Init(void){ //开启时钟,TIM2是APB1的时钟外设 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //配置GPIO RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); //选择时基单元的时钟,可以不选,默认上电后选择内部时钟 TIM_InternalClockConfig(TIM2); //配置时基单元 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//指定时钟分频 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//计数器模式 TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1;//ARR自动重装器的值 TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1;//PSC预分频器的值 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器的值,高级定时器使用 TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure); //初始化输出比较单元 TIM_OCInitTypeDef TIM_OCInitStructure; //不论是否使用,都先赋一个初值,避免出现奇奇怪怪的错误。赋值后再更改需要的参数即可 TIM_OCStructInit(&TIM_OCInitStructure);//结构体赋初始值 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//设置输出比较模式 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//设置输出比较极性 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//设置输出使能 TIM_OCInitStructure.TIM_Pulse = 0; //设置CCR TIM_OC2Init(TIM2, &TIM_OCInitStructure); //启动定时器 TIM_Cmd(TIM2,ENABLE); } void PWM_SetCompare2(uint16_t Compare) { TIM_SetCompare2(TIM2, Compare); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
PWM.h
#ifndef __PWM_H__ #define __PWM_H__ void PWM_Init(void); void PWM_SetCompare2(uint16_t Compare); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
Servo.c
#include "stm32f10x.h" // Device header #include "PWM.h" void Servo_Init(void) { PWM_Init(); } void Servo_SetAngle(float Angle) { PWM_SetCompare2(Angle / 180 * 2000 + 500); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
Servo.h
#ifndef __SERVO_H #define __SERVO_H void Servo_Init(void); void Servo_SetAngle(float Angle); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
main.c
#include "stm32f10x.h" // Device header #include "Delay.h" #include "Servo.h" #include "OLED.h" #include "Key.h" uint8_t KeyNum; float Angle; int main(void) { OLED_Init(); Servo_Init(); Key_Init(); OLED_ShowString(1, 1, "Angle:"); while (1) { KeyNum = Key_GetNum(); if (KeyNum == 1) { Angle += 30; if (Angle > 180) { Angle = 0; } } Servo_SetAngle(180); OLED_ShowNum(1, 7, Angle, 3); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
Delay.c
Delay.h
2.3、PWM驱动直流电机
功能实现:通过按键控制舵机旋转速度
PWM.c
#include "stm32f10x.h" // Device header void PWM_Init(void){ //开启时钟,TIM2是APB1的时钟外设 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //配置GPIO RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); //选择时基单元的时钟,可以不选,默认上电后选择内部时钟 TIM_InternalClockConfig(TIM2); //配置时基单元 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//指定时钟分频 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//计数器模式 TIM_TimeBaseInitStructure.TIM_Period = 100 - 1;//ARR自动重装器的值 TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1;//PSC预分频器的值 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器的值,高级定时器使用 TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure); //初始化输出比较单元 TIM_OCInitTypeDef TIM_OCInitStructure; //不论是否使用,都先赋一个初值,避免出现奇奇怪怪的错误。赋值后再更改需要的参数即可 TIM_OCStructInit(&TIM_OCInitStructure);//结构体赋初始值 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//设置输出比较模式 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//设置输出比较极性 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//设置输出使能 TIM_OCInitStructure.TIM_Pulse = 0; //设置CCR TIM_OC3Init(TIM2, &TIM_OCInitStructure); //启动定时器 TIM_Cmd(TIM2,ENABLE); } void PWM_SetCompare3(uint16_t Compare) { TIM_SetCompare3(TIM2, Compare); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
PWM.h
#ifndef __PWM_H__ #define __PWM_H__ void PWM_Init(void); void PWM_SetCompare3(uint16_t Compare); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
Motor.c
#include "stm32f10x.h" // Device header #include "PWM.h" void Motor_Init(void) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); PWM_Init(); } void Motor_SetSpeed(int8_t Speed) { if (Speed >= 0) { GPIO_SetBits(GPIOA, GPIO_Pin_4); GPIO_ResetBits(GPIOA, GPIO_Pin_5); //设置速度 PWM_SetCompare3(Speed); } else { GPIO_ResetBits(GPIOA, GPIO_Pin_4); GPIO_SetBits(GPIOA, GPIO_Pin_5); //设置速度 PWM_SetCompare3(-Speed); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
Motor.h
#ifndef __MOTOR_H #define __MOTOR_H void Motor_Init(void); void Motor_SetSpeed(int8_t Speed); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
main.c
#include "stm32f10x.h" // Device header #include "Delay.h" #include "Motor.h" #include "OLED.h" #include "Key.h" uint8_t KeyNum; int8_t Speed; int main(void) { OLED_Init(); Motor_Init(); Key_Init(); OLED_ShowString(1, 1, "Speed:"); while (1) { KeyNum = Key_GetNum(); if (KeyNum == 1) { Speed += 20; if (Speed > 100) { Speed = -100; } } Motor_SetSpeed(Speed); OLED_ShowSignedNum(1, 7, Speed, 3); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
Delay.c
Delay.h
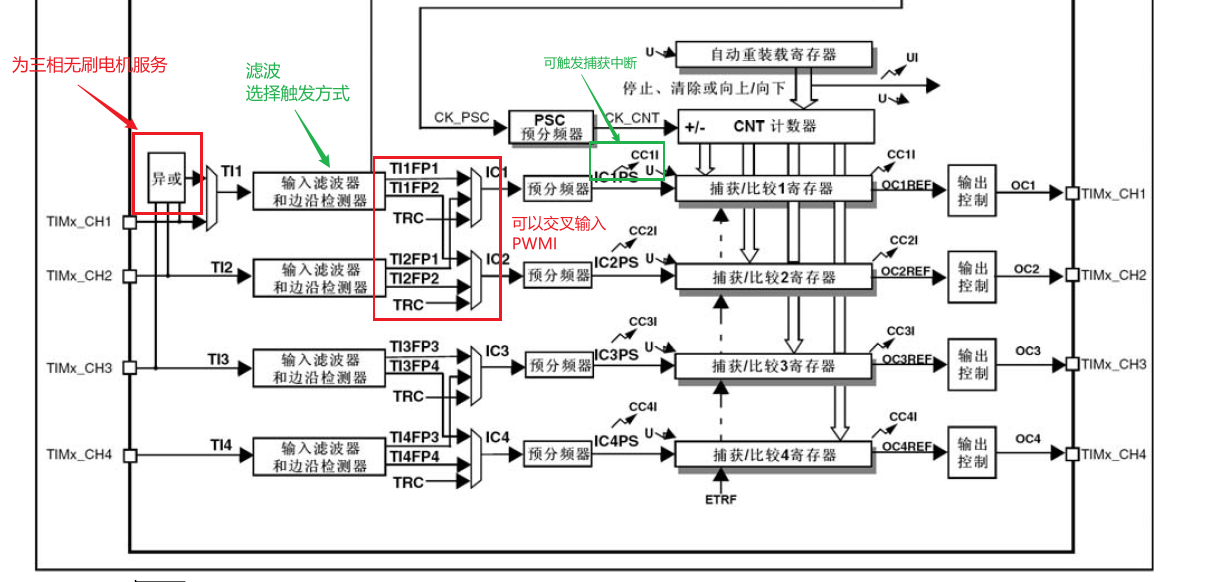
七、TIM输入捕获
IC(Input Capture)输入捕获
输入捕获模式下,当通道输入引脚出现指定电平跳变时,当前CNT的值将被锁存到CCR中,可用于测量PWM波形的频率、占空比、脉冲间隔、电平持续时间等参数
每个高级定时器和通用定时器都拥有4个输入捕获通道
可配置为PWMI模式,同时测量频率和占空比
可配合主从触发模式,实现硬件全自动测量
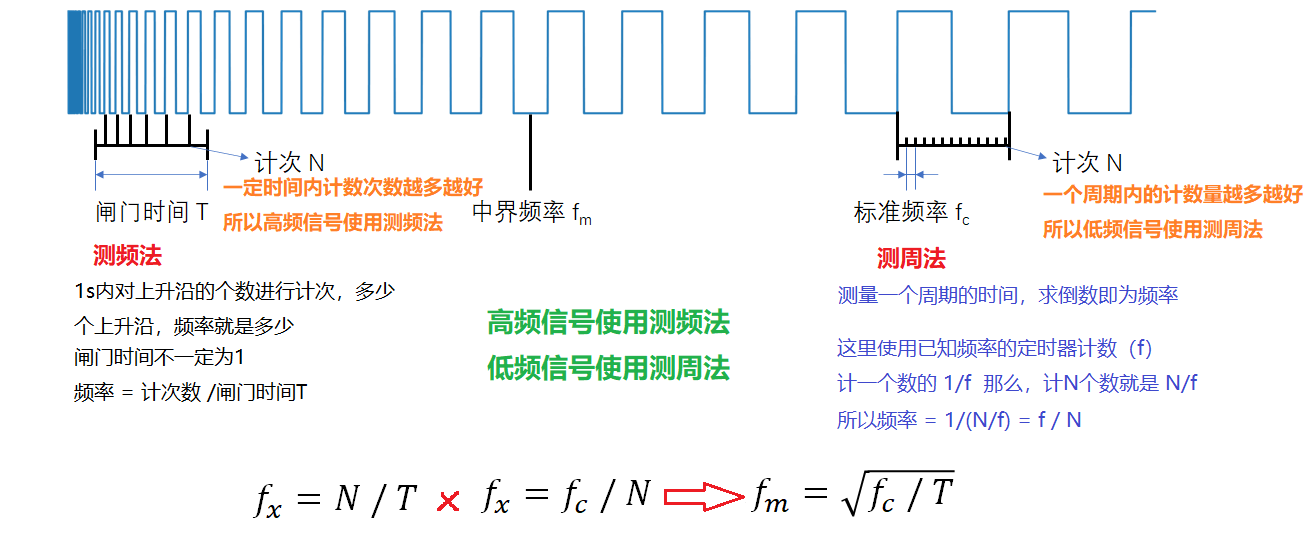
7.1频率测量
测频法:在闸门时间T内,对上升沿计次,得到N,则频率【fx=N / T】
测周法:两个上升沿内,以标准频率fc计次,得到N ,则频率【fx=fc/ N】
中界频率:测频法与测周法误差相等的频率点【fm=√(fc/ T)】
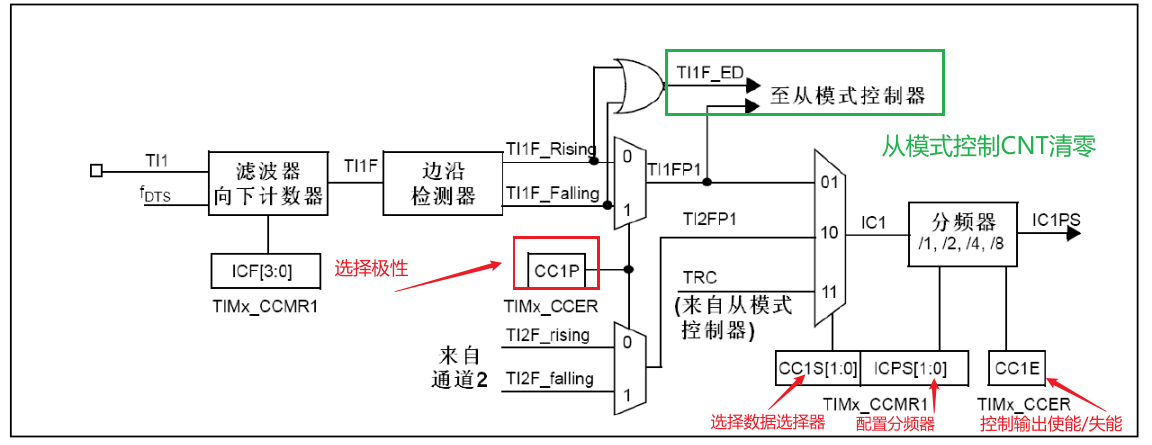
7.2输入捕获通道
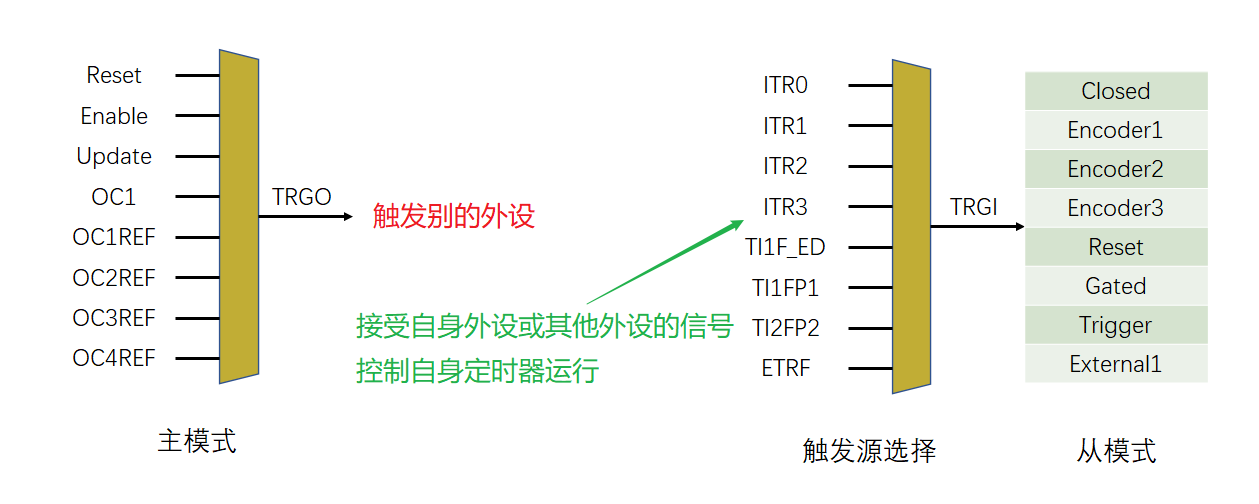
7.3主从触发模式
7.4两种捕获方式基本结构
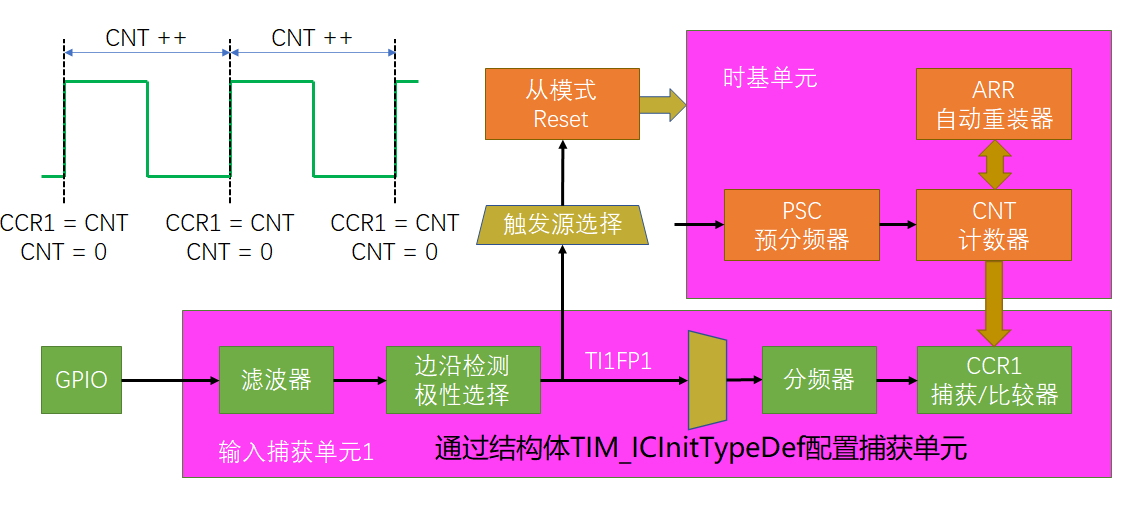
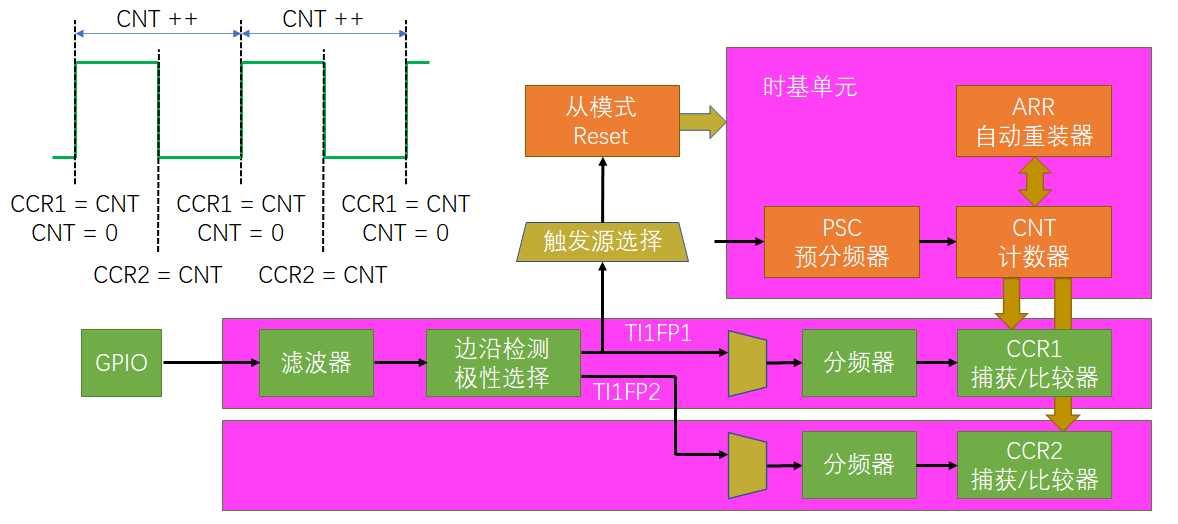
7.4.1输入捕获基本结构
触发源选择只有TI1和TI2,没有TI3和TI4,如果使用从模式自动清零CNT只能使用通道1和通道2
如果使用通道3和通道4只能开启捕获中断,手动清零
7.4.2PWMI基本结构
实例三、输入捕获模式测频率&PWMI模式测频率占空比
3.1、输入捕获模式测频率
功能实现:PA0口输出,PA6口测量
IC.c
#include "stm32f10x.h" // Device header void IC_Init(void) { //开启时钟,TIM3是APB1的时钟外设 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); //配置GPIO RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); //选择时基单元的时钟,可以不选,默认上电后选择内部时钟 TIM_InternalClockConfig(TIM3); //配置时基单元 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//指定时钟分频 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//计数器模式 TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1;//ARR自动重装器的值 TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1;//PSC预分频器的值 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器的值,高级定时器使用 TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure); //配置捕获单元 TIM_ICInitTypeDef TIM_ICInitStructure; TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;//选择通道 TIM_ICInitStructure.TIM_ICFilter = 0xF;//选择输入捕获滤波器 TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;//极性 TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;//选择分频器 TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; TIM_ICInit(TIM3,&TIM_ICInitStructure); //配置TRGI的触发源 TIM_SelectInputTrigger(TIM3, TIM_TS_TI1FP1); //配置从模式 TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset); //启动定时器 TIM_Cmd(TIM3,ENABLE); } uint32_t IC_GetFreq(void) { return 1000000 / (TIM_GetCapture1(TIM3) + 1); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
IC.h
#ifndef __IC_H__ #define __IC_H__ void IC_Init(void); uint32_t IC_GetFreq(void); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
PWM.c
#include "stm32f10x.h" // Device header void PWM_Init(void){ //开启时钟,TIM2是APB1的时钟外设 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //配置GPIO RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); //选择时基单元的时钟,可以不选,默认上电后选择内部时钟 TIM_InternalClockConfig(TIM2); //配置时基单元 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//指定时钟分频 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//计数器模式 TIM_TimeBaseInitStructure.TIM_Period = 100 - 1;//ARR自动重装器的值 TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1;//PSC预分频器的值 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器的值,高级定时器使用 TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure); //初始化输出比较单元 TIM_OCInitTypeDef TIM_OCInitStructure; //不论是否使用,都先赋一个初值,避免出现奇奇怪怪的错误。赋值后再更改需要的参数即可 TIM_OCStructInit(&TIM_OCInitStructure);//结构体赋初始值 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//设置输出比较模式 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//设置输出比较极性 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//设置输出使能 TIM_OCInitStructure.TIM_Pulse = 0; //设置CCR TIM_OC1Init(TIM2, &TIM_OCInitStructure); //启动定时器 TIM_Cmd(TIM2,ENABLE); } void PWM_SetCompare1(uint16_t Compare)//改变占空比 { TIM_SetCompare1(TIM2, Compare); } void PWM_SetPrescaler(uint16_t Prescaler)//改变频率 { TIM_PrescalerConfig(TIM2, Prescaler, TIM_PSCReloadMode_Update); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
PWM.h
#ifndef __PWM_H__ #define __PWM_H__ void PWM_Init(void); void PWM_SetCompare1(uint16_t Compare); void PWM_SetPrescaler(uint16_t Prescaler); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
main.c
#include "stm32f10x.h" // Device header #include "Delay.h" #include "PWM.h" #include "OLED.h" #include "IC.h" uint8_t i; int main(){ OLED_Init(); PWM_Init(); IC_Init(); OLED_ShowString(1,1,"Freq:00000HZ"); PWM_SetCompare1(50); PWM_SetPrescaler(720-1); while(1){ OLED_ShowNum(1,6,IC_GetFreq(),5); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
OLED.c
OLED.h
3.2、PWMI模式测量占空比
功能实现:PA0口输出,PA6口测量,双通道分别测量频率和占空比
注意:可以使用TIM_PWMIConfig函数直接配置另一个通道
IC.c
#include "stm32f10x.h" // Device header void IC_Init(void) { //开启时钟,TIM3是APB1的时钟外设 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); //配置GPIO RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); //选择时基单元的时钟,可以不选,默认上电后选择内部时钟 TIM_InternalClockConfig(TIM3); //配置时基单元 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//指定时钟分频 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//计数器模式 TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1;//ARR自动重装器的值 TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1;//PSC预分频器的值 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器的值,高级定时器使用 TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure); TIM_ICInitTypeDef TIM_ICInitStructure; TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;//选择通道 TIM_ICInitStructure.TIM_ICFilter = 0xF;//选择输入捕获滤波器 TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;//极性 TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;//选择分频器 TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //配置另一个通道的参数 TIM_PWMIConfig(TIM3,&TIM_ICInitStructure); TIM_ICInit(TIM3,&TIM_ICInitStructure); //配置TRGI的触发源 TIM_SelectInputTrigger(TIM3, TIM_TS_TI1FP1); //配置从模式 TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset); //启动定时器 TIM_Cmd(TIM3,ENABLE); } uint32_t IC_GetFreq(void) { return 1000000 / (TIM_GetCapture1(TIM3) + 1); } uint32_t IC_GetDuty(void) { return (TIM_GetCapture2(TIM3) + 1) * 100 / (TIM_GetCapture1(TIM3) + 1); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
IC.h
#ifndef __IC_H__ #define __IC_H__ void IC_Init(void); uint32_t IC_GetFreq(void); uint32_t IC_GetDuty(void); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
PWM.c
#include "stm32f10x.h" // Device header void PWM_Init(void){ //开启时钟,TIM2是APB1的时钟外设 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //配置GPIO RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); //选择时基单元的时钟,可以不选,默认上电后选择内部时钟 TIM_InternalClockConfig(TIM2); //配置时基单元 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//指定时钟分频 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//计数器模式 TIM_TimeBaseInitStructure.TIM_Period = 100 - 1;//ARR自动重装器的值 TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1;//PSC预分频器的值 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器的值,高级定时器使用 TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure); //初始化输出比较单元 TIM_OCInitTypeDef TIM_OCInitStructure; //不论是否使用,都先赋一个初值,避免出现奇奇怪怪的错误。赋值后再更改需要的参数即可 TIM_OCStructInit(&TIM_OCInitStructure);//结构体赋初始值 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//设置输出比较模式 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//设置输出比较极性 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//设置输出使能 TIM_OCInitStructure.TIM_Pulse = 0; //设置CCR TIM_OC1Init(TIM2, &TIM_OCInitStructure); //启动定时器 TIM_Cmd(TIM2,ENABLE); } void PWM_SetCompare1(uint16_t Compare)//改变占空比 { TIM_SetCompare1(TIM2, Compare); } void PWM_SetPrescaler(uint16_t Prescaler)//改变频率 { TIM_PrescalerConfig(TIM2, Prescaler, TIM_PSCReloadMode_Update); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
PWM.h
#ifndef __PWM_H__ #define __PWM_H__ void PWM_Init(void); void PWM_SetCompare1(uint16_t Compare); void PWM_SetPrescaler(uint16_t Prescaler); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
main.c
#include "stm32f10x.h" // Device header #include "Delay.h" #include "PWM.h" #include "OLED.h" #include "IC.h" uint8_t i; int main(){ OLED_Init(); PWM_Init(); IC_Init(); OLED_ShowString(1,1,"Freq:00000HZ"); OLED_ShowString(2,1,"Duty:00%"); PWM_SetPrescaler(7200-1); PWM_SetCompare1(90); while(1){ OLED_ShowNum(1,6,IC_GetFreq(),5); OLED_ShowNum(2,6,IC_GetDuty(),2); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
OLED.c
OLED.h
八、TIM编码器接口
Encoder Interface 编码器接口
编码器接口可接收增量(正交)编码器的信号,根据编码器旋转产生的正交信号脉冲,自动控制CNT自增或自减,从而指示编码器的位置、旋转方向和旋转速度
每个高级定时器和通用定时器都拥有1个编码器接口
两个输入引脚借用了输入捕获的通道1和通道2
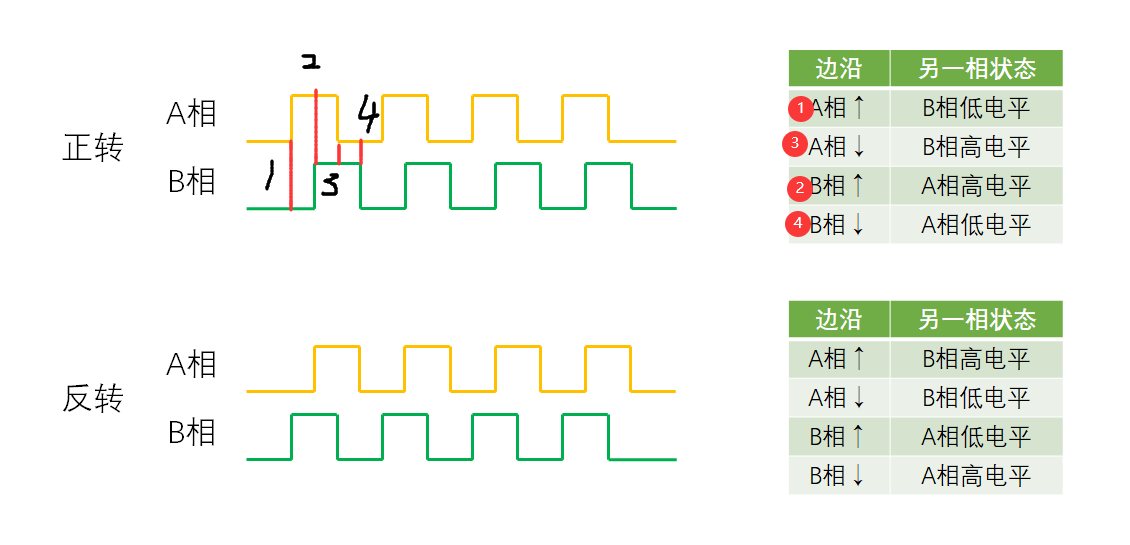
8.1正交编码器
正交信号:正转和反转的位相相差90°
正交信号的优势:精度高、可以抗噪声
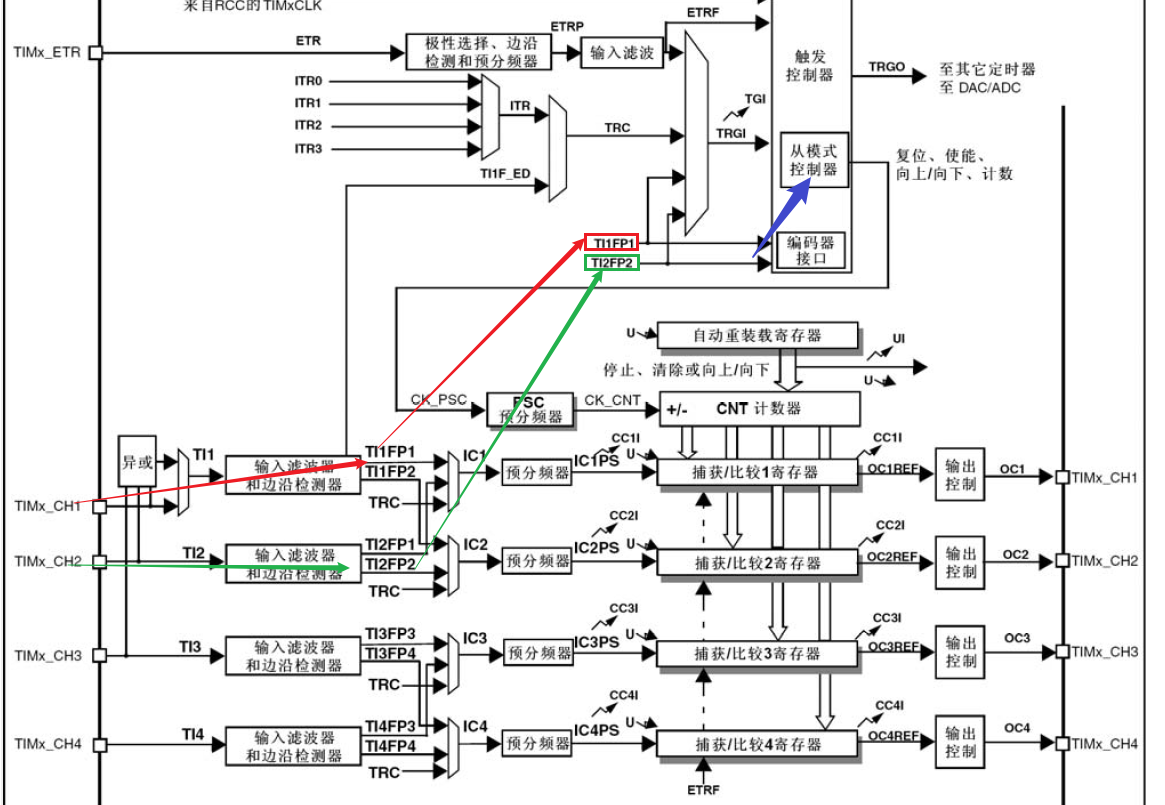
8.2编码器接口基本结构
参考手册框图:
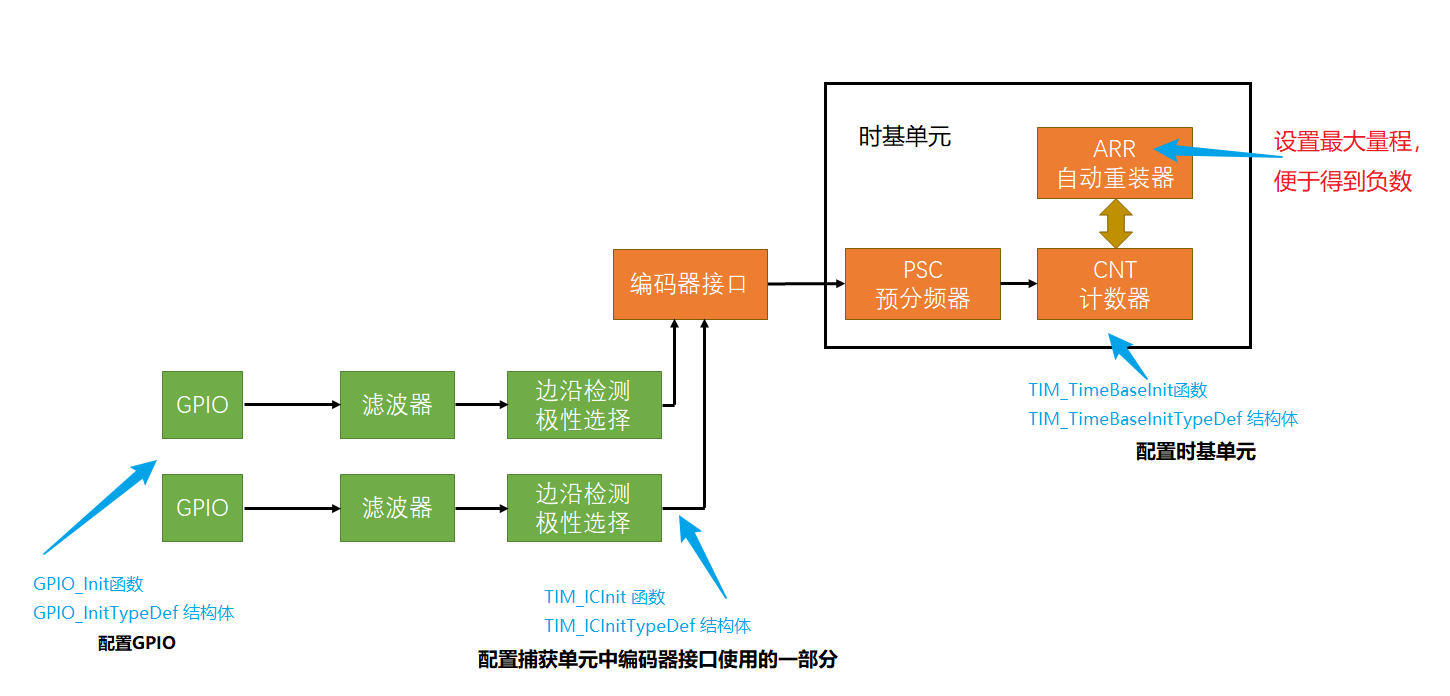
简化原理图:
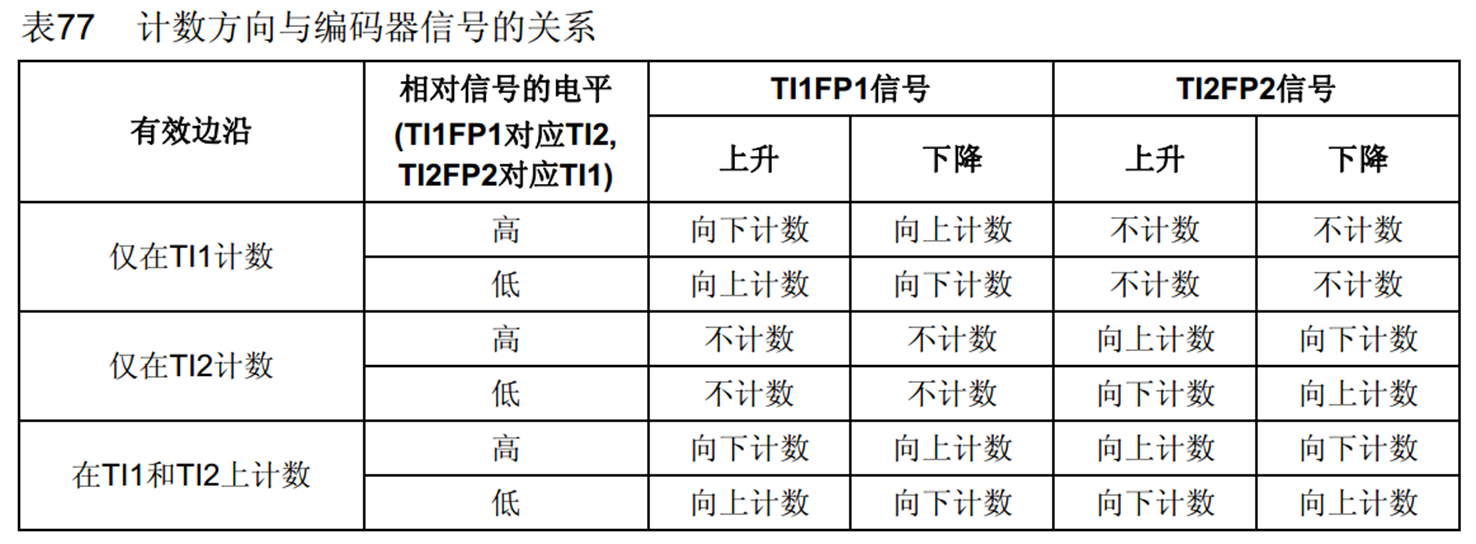
8.3工作模式
实例四编码器接口测速
Encoder.c
#include "stm32f10x.h" // Device header void Encoder_Init(void){ //开启时钟,TIM3是APB1的时钟外设 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); //配置GPIO RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); //编码器接口是一个带方向控制的外部时钟,所以内部时钟不需要 //选择时基单元的时钟,可以不选,默认上电后选择内部时钟 //TIM_InternalClockConfig(TIM3); //配置时基单元 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//指定时钟分频 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//计数器模式 TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1;//ARR自动重装器的值,满量程,容易转换成负数 TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1;//PSC预分频器的值,不分频 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器的值,高级定时器使用 TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure); //配置捕获单元 TIM_ICInitTypeDef TIM_ICInitStructure; //结构体配置不完整,所以需要默认初始化 //通道1 TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;//选择通道 TIM_ICInitStructure.TIM_ICFilter = 0xF;//选择输入捕获滤波器 //后面仍会配置极性,后面的会覆盖前面的,可以删去 //TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;//极性,上升沿,不反向 //这两项编码器用不到,可以删去,但是删去后结构体配置不完整,需要初始化一下 //TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;//选择分频器 //TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; TIM_ICInit(TIM3,&TIM_ICInitStructure); //配置通道2 TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;//选择通道 TIM_ICInitStructure.TIM_ICFilter = 0xF;//选择输入捕获滤波器 TIM_ICInit(TIM3,&TIM_ICInitStructure); //配置编码器接口 TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising); TIM_Cmd(TIM3,ENABLE); } int16_t Encoder_Get(void){ int16_t temp; temp = TIM_GetCounter(TIM3); TIM_SetCounter(TIM3,0); return temp; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
Encoder.h
#ifndef __ENCODER_H__ #define __ENCODER_H__ void Encoder_Init(void); int16_t Encoder_Get(void); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
Timer.c
#include "stm32f10x.h" // Device header void Timer_Init(void){ //开启时钟,TIM2是APB1的时钟外设 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //选择时基单元的时钟,可以不选,默认上电后选择内部时钟 TIM_InternalClockConfig(TIM2); //配置时基单元 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//指定时钟分频 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//计数器模式 TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1;//ARR自动重装器的值 TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1;//PSC预分频器的值 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器的值,高级定时器使用 TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure); //手动清除中断标志位,避免刚初始化完就进入中断 TIM_ClearFlag(TIM2,TIM_IT_Update); //使能中断 TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE); //配置NVIC NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); NVIC_InitTypeDef NVIC_InitStructure; NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_Init(&NVIC_InitStructure); //启动定时器 TIM_Cmd(TIM2,ENABLE); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
Timer.h
#ifndef __TIMER_H__ #define __TIMER_H__ void Timer_Init(void); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
main.c
#include "stm32f10x.h" // Device header #include "OLED.h" #include "Timer.h" #include "Encoder.h" int16_t speed; int main(){ OLED_Init(); Timer_Init(); Encoder_Init(); OLED_ShowString(1,1,"SPEED:"); while(1){ //OLED_ShowNum(1,5,num,5); OLED_ShowSignedNum(2,1,speed,5); } } void TIM2_IRQHandler(void){ //判断中断 if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET){ speed = Encoder_Get(); //清除中断标志位 TIM_ClearITPendingBit(TIM2,TIM_IT_Update); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
OLED.c
OLED.h
-
-
相关阅读:
数据结构(递归,链表实现递归)
多视图聚类论文阅读(二)
VSCode怎么创建Java项目
力扣:118. 杨辉三角(Python3)
Tesco EDI需求分析
MySQL 如何添加索引
如何批量上传Maven仓库jar包到Nexus3.x私服
vue3总结(未完~)
Etcd-v3.4.27集群部署
每日算法刷题Day3-起始时间转换、二次方根、while连续输入、斐波那契思路
- 原文地址:https://blog.csdn.net/qq_61228493/article/details/128055976
