-
stm32 笔记 PWM及HAL库应用
stm32 PWM原理

STM32 使用一个定时器作为 PWM 输出,在上图中,ARR 即为重装载值。在计数器的值大于CRRx的值并且小于 ARR 之间,即区分高低电平。输出在图中分别有 ① 和 ② 两种情况.
分别为:
①CRR 和 ARR 区间为低电平。
②CRR 和 ARR 区间为高电平。
设置输出方式
有两个配置可以配置输出方式:
PWM 模式 1–– 在递增计数模式下,只要 TIMx_CNT
TIMx_CCR1,通道 1 便为无效状态,否则为有效状态。 PWM 模式 2–– 在递增计数模式下,只要 TIMx_CNT
TIMx_CCR1,通道 1 便为有效状态,否则为无效状态。 TIMx_CNT即为当前计数值
其中 PWM 模式 1 和模式 2 完全相反。

除了设置PWM模式之外,还可以设置 CERR:CC1P 位,置 0 高电平有效,置 1 低电平有效。
例:

如果设置为 PWM1 模式,CC1P 设置为 0,即为:①波形
如果设置为 PWM1 模式,CC1P 设置为 1,即为:②波形
初始化 PWM
- TIM_HandleTypeDef TIM3_Handler; //定时器3PWM句柄
- TIM_OC_InitTypeDef TIM3_CH4Handler; //定时器3通道4句柄
- void TIM3_PWM_Init()
- {
- TIM3_Handler.Instance=TIM3; //定时器3
- TIM3_Handler.Init.Prescaler=90-1; //定时器分频
- TIM3_Handler.Init.CounterMode=TIM_COUNTERMODE_UP;//向上计数模式
- TIM3_Handler.Init.Period=500-1; //自动重装载值
- HAL_TIM_PWM_Init(&TIM3_Handler); //初始化PWM
- TIM3_CH4Handler.OCMode=TIM_OCMODE_PWM1; //模式选择PWM1
- TIM3_CH4Handler.Pulse=250; //设置默认占空比
- TIM3_CH4Handler.OCPolarity=TIM_OCPOLARITY_LOW; //输出比较极性为低 cc1p为0
- HAL_TIM_PWM_ConfigChannel(&TIM3_Handler,&TIM3_CH4Handler,TIM_CHANNEL_4);//配置TIM3通道4
- HAL_TIM_PWM_Start(&TIM3_Handler,TIM_CHANNEL_4);//开启PWM通道4
- }
在上边我们设置了 90分频(Prescaler),我当前机器设置的是 90mhz,90 分频后即为 1mhz 即一秒计数 1000 次,重装载值 (Period)设置为 500。也就说,对于当前 PWM 周期为 500ms。
在之后,我们设置了 TIM3_CH4Handler.Pulse=250; 这即是默认的输出占空比。
输出波形如图所示:

设置 GPIO 状态
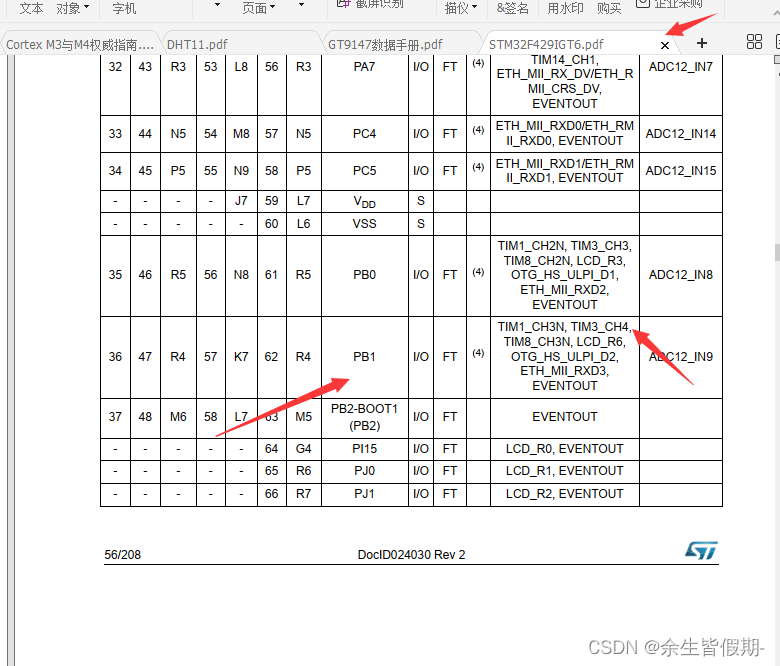
在芯片手册中,我们发现 PB1 可以被复用为 TIM3,于是做出如下设置:
- void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim)
- {
- GPIO_InitTypeDef GPIO_Initure;
- __HAL_RCC_TIM3_CLK_ENABLE(); //使能定时器3
- __HAL_RCC_GPIOB_CLK_ENABLE(); //开启GPIOB时钟
- GPIO_Initure.Pin=GPIO_PIN_1; //PB1
- GPIO_Initure.Mode=GPIO_MODE_AF_PP; //复用推挽输出
- GPIO_Initure.Pull=GPIO_PULLUP; //上拉
- GPIO_Initure.Speed=GPIO_SPEED_HIGH; //高速
- GPIO_Initure.Alternate= GPIO_AF2_TIM3; //PB1复用为TIM3_CH4
- HAL_GPIO_Init(GPIOB,&GPIO_Initure);
- }
我们想让 PB1 输出 PWM 波,需要开启时钟这些常规配置。并且需要使用GPIO_Initure.Alternate= GPIO_AF2_TIM3; 使 PB1 复用成 TIM3。这样才可以输出 PWM 波。
编写设置 PWM 值函数
因为我们刚才在初始化的时候用了:
HAL_TIM_PWM_ConfigChannel(&TIM3_Handler,&TIM3_CH4Handler,TIM_CHANNEL_4)
HAL_TIM_PWM_Start(&TIM3_Handler,TIM_CHANNEL_4)
均是 CHANNEL_4 使用了通道4。
- //设置TIM通道4的占空比
- //compare:比较值
- void TIM_SetTIM3Compare4(u32 compare)
- {
- TIM3->CCR4=compare;
- }
全部代码
- #include "sys.h"
- #include "delay.h"
- TIM_HandleTypeDef TIM3_Handler; //定时器3PWM句柄
- TIM_OC_InitTypeDef TIM3_CH4Handler; //定时器3通道4句柄
- void TIM3_PWM_Init()
- {
- TIM3_Handler.Instance=TIM3; //定时器3
- TIM3_Handler.Init.Prescaler=90-1; //定时器分频
- TIM3_Handler.Init.CounterMode=TIM_COUNTERMODE_UP;//向上计数模式
- TIM3_Handler.Init.Period=500-1; //自动重装载值
- HAL_TIM_PWM_Init(&TIM3_Handler); //初始化PWM
- TIM3_CH4Handler.OCMode=TIM_OCMODE_PWM1; //模式选择PWM1
- TIM3_CH4Handler.Pulse=250; //设置比较值,此值用来确定占空比,默认比较值为自动重装载值的一半,即占空比为50%
- TIM3_CH4Handler.OCPolarity=TIM_OCPOLARITY_LOW; //输出比较极性为低 cc1p为0
- HAL_TIM_PWM_ConfigChannel(&TIM3_Handler,&TIM3_CH4Handler,TIM_CHANNEL_4);//配置TIM3通道4
- HAL_TIM_PWM_Start(&TIM3_Handler,TIM_CHANNEL_4);//开启PWM通道4
- }
- void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim)
- {
- GPIO_InitTypeDef GPIO_Initure;
- __HAL_RCC_TIM3_CLK_ENABLE(); //使能定时器3
- __HAL_RCC_GPIOB_CLK_ENABLE(); //开启GPIOB时钟
- GPIO_Initure.Pin=GPIO_PIN_1; //PB1
- GPIO_Initure.Mode=GPIO_MODE_AF_PP; //复用推挽输出
- GPIO_Initure.Pull=GPIO_PULLUP; //上拉
- GPIO_Initure.Speed=GPIO_SPEED_HIGH; //高速
- GPIO_Initure.Alternate= GPIO_AF2_TIM3; //PB1复用为TIM3_CH4
- HAL_GPIO_Init(GPIOB,&GPIO_Initure);
- }
- //设置TIM通道4的占空比
- //compare:比较值
- void TIM_SetTIM3Compare4(u32 compare)
- {
- TIM3->CCR4=compare; //因为使用了通道4,所以需要修改 CCR4 寄存器
- }
- int main(void)
- {
- GPIO_InitTypeDef GPIO_Initure;
- HAL_Init(); //初始化HAL库
- Stm32_Clock_Init(360,25,2,8); //设置时钟,180Mhz
- TIM3_PWM_Init();
- while(1){
- TIM_SetTIM3Compare4(0); //因为使用了 PWM模式1 以及cc1p0 所以设置0是最暗 设置500是最亮
- }
- }
-
相关阅读:
群辉 Synology NAS Docker 安装 RustDesk-server 自建服务器只要一个容器
手把手教小白制作情侣天气推送号 【只需四步】
Android Q(10)系统上的异常生命周期事件
外汇天眼周回顾:Equiti开设最新办事处,Vantage推出Vantage Connect服务
vue vue 常用的扩展组件
uniapp生成的h5与flutter的原生进行交互
vue2中的props属性
20221117 今天的世界发生了什么
【学习推荐】极客时间-左耳听风专栏
19c pdb克隆单机到rac,日志出现:WARNING报警处理
- 原文地址:https://blog.csdn.net/nullccc/article/details/128132290
