-
《统计学习方法》 第三章 K近邻法
K K K近邻法
k k k近邻法是基本且简单的分类与回归方法
k k k近邻法的基本做法是:
- 对给定的训练实例点和输入实例点,首先确定输入实例点的 k k k个最近邻训练实例点
- 利用这 k k k个训练实例点的类的多数来预测输入实例点的类
k k k近邻模型是对应于基于训练数据集对特征空间的一个划分
k k k近邻法中,当训练集、距离度量、 k k k值及分类决策规则确定后,其结果唯一确定
k k k近邻法三要素:距离度量、 k k k值的选择和分类决策规则
常用的距离度量是欧氏距离及更一般的pL距离
k k k值小时, k k k近邻模型更复杂; k k k值大时, k k k近邻模型更简单。
k k k值的选择反映了对近似误差与估计误差之间的权衡,通常由交叉验证选择最优的 k k k
常用的分类决策规则是多数表决,对应于经验风险最小化
k k k近邻法的实现需要考虑如何快速搜索k个最近邻点
kd树是一种便于对k维空间中的数据进行快速检索的数据结构
kd树是二叉树,表示对 k k k维空间的一个划分,其每个结点对应于 k k k维空间划分中的一个超矩形区域
利用kd树可以省去对大部分数据点的搜索, 从而减少搜索的计算量
K K K近邻法公式
设特征空间 x x x是 n n n维实数向量空间
x i , x j ∈ X x_{i}, x_{j} \in \mathcal{X} xi,xj∈X
x i = ( x i ( 1 ) , x i ( 2 ) , ⋯ , x i ( n ) ) T x_{i}=\left(x_{i}^{(1)}, x_{i}^{(2)}, \cdots, x_{i}^{(n)}\right)^{\mathrm{T}} xi=(xi(1),xi(2),⋯,xi(n))T
x j = ( x j ( 1 ) , x j ( 2 ) , ⋯ , x j ( n ) ) T x_{j}=\left(x_{j}^{(1)}, x_{j}^{(2)}, \cdots, x_{j}^{(n)}\right)^{\mathrm{T}} xj=(xj(1),xj(2),⋯,xj(n))T
x i x_i xi, x j x_j xj的 L p L_p Lp距离定义为
L p ( x i , x j ) = ( ∑ i = 1 n ∣ x i ( i ) − x j ( l ) ∣ p ) 1 p L_{p}\left(x_{i}, x_{j}\right)=\left(\sum_{i=1}^{n}\left|x_{i}^{(i)}-x_{j}^{(l)}\right|^{p}\right)^{\frac{1}{p}} Lp(xi,xj)=(∑i=1n∣∣∣xi(i)−xj(l)∣∣∣p)p1
其中
- p = 1 p= 1 p=1 曼哈顿距离
- p = 2 p= 2 p=2 欧氏距离
- p = ∞ p= \infty p=∞ 切比雪夫距离
K K K近邻法代码实现
import math from itertools import combinations def L(x, y, p=2): # x1 = [1, 1], x2 = [5,1] if len(x) == len(y) and len(x) > 1: sum = 0 for i in range(len(x)): sum += math.pow(abs(x[i] - y[i]), p) return math.pow(sum, 1 / p) else: return 0- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
遍历所有数据点,找出 n n n个距离最近的点的分类情况,少数服从多数
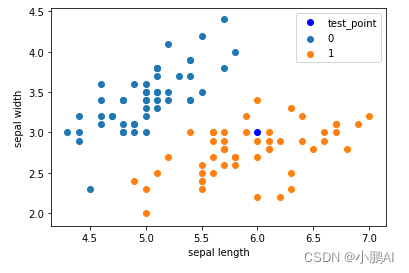
import numpy as np import pandas as pd import matplotlib.pyplot as plt from sklearn.datasets import load_iris from sklearn.model_selection import train_test_split from collections import Counter # data iris = load_iris() df = pd.DataFrame(iris.data, columns=iris.feature_names) df['label'] = iris.target df.columns = ['sepal length', 'sepal width', 'petal length', 'petal width', 'label'] plt.scatter(df[:50]['sepal length'], df[:50]['sepal width'], label='0') plt.scatter(df[50:100]['sepal length'], df[50:100]['sepal width'], label='1') plt.xlabel('sepal length') plt.ylabel('sepal width') plt.legend()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20

data = np.array(df.iloc[:100, [0, 1, -1]]) X, y = data[:,:-1], data[:,-1] X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2) class KNN: def __init__(self, X_train, y_train, n_neighbors=3, p=2): """ parameter: n_neighbors 临近点个数 parameter: p 距离度量 """ self.n = n_neighbors self.p = p self.X_train = X_train self.y_train = y_train def predict(self, X): knn_list = [] for i in range(self.n): dist = np.linalg.norm(X - self.X_train[i], ord=self.p) knn_list.append((dist, self.y_train[i])) for i in range(self.n, len(self.X_train)): max_index = knn_list.index(max(knn_list, key=lambda x: x[0])) dist = np.linalg.norm(X - self.X_train[i], ord=self.p) if knn_list[max_index][0] > dist: knn_list[max_index] = (dist, self.y_train[i]) # 统计 knn = [k[-1] for k in knn_list] count_pairs = Counter(knn) max_count = sorted(count_pairs.items(), key=lambda x: x[1])[-1][0] return max_count def score(self, X_test, y_test): right_count = 0 n = 10 for X, y in zip(X_test, y_test): label = self.predict(X) if label == y: right_count += 1 return right_count / len(X_test) clf = KNN(X_train, y_train) plt.scatter(df[:50]['sepal length'], df[:50]['sepal width'], label='0') plt.scatter(df[50:100]['sepal length'], df[50:100]['sepal width'], label='1') plt.plot(test_point[0], test_point[1], 'bo', label='test_point') plt.xlabel('sepal length') plt.ylabel('sepal width') plt.legend()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
k d kd kd树
kd树是一种对k维空间中的实例点进行存储以便对其进行快速检索的树形数据结构
kd树是二叉树,表示对 k k k维空间的一个划分(partition)
构造kd树相当于不断地用垂直于坐标轴的超平面将 k k k维空间切分,构成一系列的k维超矩形区域。
kd树的每个结点对应于一个 k k k维超矩形区域。
构造kd树的方法如下
- 构造根结点,使根结点对应于 k k k维空间中包含所有实例点的超矩形区域
- 通过下面的递归方法,不断地对 k k k维空间进行切分,生成子结点
- 在超矩形区域(结点)上选择一个坐标轴和在此坐标轴上的一个切分点,确定一个超平面
- 这个超平面通过选定的切分点并垂直于选定的坐标轴,将当前超矩形区域切分为左右两个子区域 (子结点)
- 这时,实例被分到两个子区域
- 这个过程直到子区域内没有实例时终止(终止时的结点为叶结点)
- 在此过程中,将实例保存在相应的结点上
通常,依次选择坐标轴对空间切分,选择训练实例点在选定坐标轴上的中位数 (median)为切分点
这样得到的 k d kd kd树是平衡的。注意,平衡的 k d kd kd树搜索时的效率未必是最优的。
构造平衡 k d kd kd树算法
输入:
k k k维空间数据集 T = { x 1 , x 2 , … , x N } T=\{x_1,x_2,…,x_N\} T={x1,x2,…,xN}
其中 x i = ( x i ( 1 ) , x i ( 2 ) , ⋯ , x i ( k ) ) T x_{i}=\left(x_{i}^{(1)}, x_{i}^{(2)}, \cdots, x_{i}^{(k)}\right)^{\mathrm{T}} xi=(xi(1),xi(2),⋯,xi(k))T , i = 1 , 2 , … , N i=1,2,…,N i=1,2,…,N
输出: kd树
开始:
构造根结点,根结点对应于包含 T T T的 k k k维空间的超矩形区域
选择 x ( 1 ) x^{(1)} x(1)为坐标轴,以T中所有实例的 x ( 1 ) x^{(1)} x(1)坐标的中位数为切分点,将根结点对应的超矩形区域切分为两个子区域
切分由通过切分点并与坐标轴 x ( 1 ) x^{(1)} x(1)垂直的超平面实现
由根结点生成深度为1的左、右子结点:左子结点对应坐标 x ( 1 ) x^{(1)} x(1)小于切分点的子区域
右子结点对应于坐标 x ( 1 ) x^{(1)} x(1)大于切分点的子区域
将落在切分超平面上的实例点保存在根结点
重复:
对深度为 j j j的结点,选择 x ( 1 ) x^{(1)} x(1)为切分的坐标轴, l = j ( m o d k ) + 1 l=j(modk)+1 l=j(modk)+1
以该结点的区域中所有实例的 x ( 1 ) x^{(1)} x(1)坐标的中位数为切分点,将该结点对应的超矩形区域切分为两个子区域
切分由通过切分点并与坐标轴 x ( 1 ) x^{(1)} x(1)垂直的超平面实现
由该结点生成深度为 j + 1 j+1 j+1的左、右子结点:
左子结点对应坐标 x ( 1 ) x^{(1)} x(1)小于切分点的子区域,右子结点对应坐标 x ( 1 ) x^{(1)} x(1)大于切分点的子区域
将落在切分超平面上的实例点保存在该结点
停止:
直到两个子区域没有实例存在时停止。从而形成 k d kd kd树的区域划分。
代码实现
# kd-tree每个结点中主要包含的数据结构如下 class KdNode(object): def __init__(self, dom_elt, split, left, right): self.dom_elt = dom_elt # k维向量节点(k维空间中的一个样本点) self.split = split # 整数(进行分割维度的序号) self.left = left # 该结点分割超平面左子空间构成的kd-tree self.right = right # 该结点分割超平面右子空间构成的kd-tree class KdTree(object): def __init__(self, data): k = len(data[0]) # 数据维度 def CreateNode(split, data_set): # 按第split维划分数据集exset创建KdNode if not data_set: # 数据集为空 return None # key参数的值为一个函数,此函数只有一个参数且返回一个值用来进行比较 # operator模块提供的itemgetter函数用于获取对象的哪些维的数据,参数为需要获取的数据在对象中的序号 #data_set.sort(key=itemgetter(split)) # 按要进行分割的那一维数据排序 data_set.sort(key=lambda x: x[split]) split_pos = len(data_set) // 2 # //为Python中的整数除法 median = data_set[split_pos] # 中位数分割点 split_next = (split + 1) % k # cycle coordinates # 递归的创建kd树 return KdNode( median, split, CreateNode(split_next, data_set[:split_pos]), # 创建左子树 CreateNode(split_next, data_set[split_pos + 1:])) # 创建右子树 self.root = CreateNode(0, data) # 从第0维分量开始构建kd树,返回根节点 # KDTree的前序遍历 def preorder(root): print(root.dom_elt) if root.left: # 节点不为空 preorder(root.left) if root.right: preorder(root.right)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
# 对构建好的kd树进行搜索,寻找与目标点最近的样本点: from math import sqrt from collections import namedtuple # 定义一个namedtuple,分别存放最近坐标点、最近距离和访问过的节点数 result = namedtuple("Result_tuple", "nearest_point nearest_dist nodes_visited") def find_nearest(tree, point): k = len(point) # 数据维度 def travel(kd_node, target, max_dist): if kd_node is None: return result([0] * k, float("inf"), 0) # python中用float("inf")和float("-inf")表示正负无穷 nodes_visited = 1 s = kd_node.split # 进行分割的维度 pivot = kd_node.dom_elt # 进行分割的“轴” if target[s] <= pivot[s]: # 如果目标点第s维小于分割轴的对应值(目标离左子树更近) nearer_node = kd_node.left # 下一个访问节点为左子树根节点 further_node = kd_node.right # 同时记录下右子树 else: # 目标离右子树更近 nearer_node = kd_node.right # 下一个访问节点为右子树根节点 further_node = kd_node.left temp1 = travel(nearer_node, target, max_dist) # 进行遍历找到包含目标点的区域 nearest = temp1.nearest_point # 以此叶结点作为“当前最近点” dist = temp1.nearest_dist # 更新最近距离 nodes_visited += temp1.nodes_visited if dist < max_dist: max_dist = dist # 最近点将在以目标点为球心,max_dist为半径的超球体内 temp_dist = abs(pivot[s] - target[s]) # 第s维上目标点与分割超平面的距离 if max_dist < temp_dist: # 判断超球体是否与超平面相交 return result(nearest, dist, nodes_visited) # 不相交则可以直接返回,不用继续判断 #---------------------------------------------------------------------- # 计算目标点与分割点的欧氏距离 temp_dist = sqrt(sum((p1 - p2)**2 for p1, p2 in zip(pivot, target))) if temp_dist < dist: # 如果“更近” nearest = pivot # 更新最近点 dist = temp_dist # 更新最近距离 max_dist = dist # 更新超球体半径 # 检查另一个子结点对应的区域是否有更近的点 temp2 = travel(further_node, target, max_dist) nodes_visited += temp2.nodes_visited if temp2.nearest_dist < dist: # 如果另一个子结点内存在更近距离 nearest = temp2.nearest_point # 更新最近点 dist = temp2.nearest_dist # 更新最近距离 return result(nearest, dist, nodes_visited) return travel(tree.root, point, float("inf")) # 从根节点开始递归- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
-
相关阅读:
H2O R语言搭建
[Java反序列化]—Shiro反序列化(二)
代码随想录动态规划——回文字串(三种方法求解,dp/中心扩散1/中心扩散2)
geoserver mysql低版本兼容以及乱码问题
季铵盐离子液体4-(苯甲酸)三乙胺溴(QAIL)固载金属-有机骨架材料MIL-101(科研)
自监督学习和对比学习举例讲解(附代码)
基于JavaWEB+MySQL的二手闲置物品交易网站系统
查题搜题公众号题库接口
MongoDB聚合运算符:$sampleRate
基于招聘广告的岗位人才需求分析框架构建与实证研究
- 原文地址:https://blog.csdn.net/qq_38973721/article/details/128002583