-
【三维点云】2-三维点云表征
内容概要
1 三维数据的获取方式
2 三维数据的获取原理
3 三维信息的表征形式
4 深度学习中的三维表征
5 点云的基本特征和描述
6 三维空间变换1 三维数据的获取方式及原理

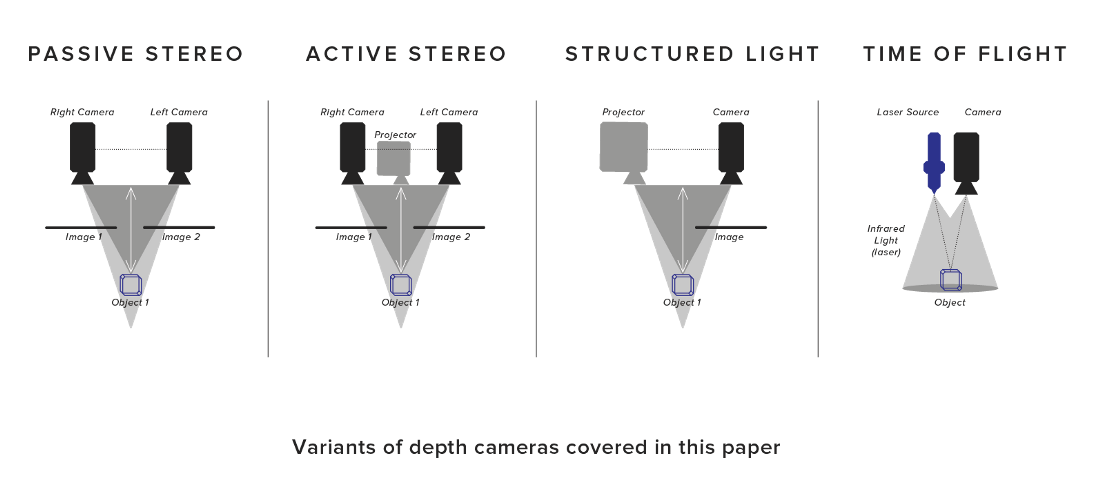
1.1 被动测量
单目立体视觉
双目立体视觉

多目立体视觉


1.2 主动测量
结构光3D成像

TOF 3D成像
脉冲法


TOF
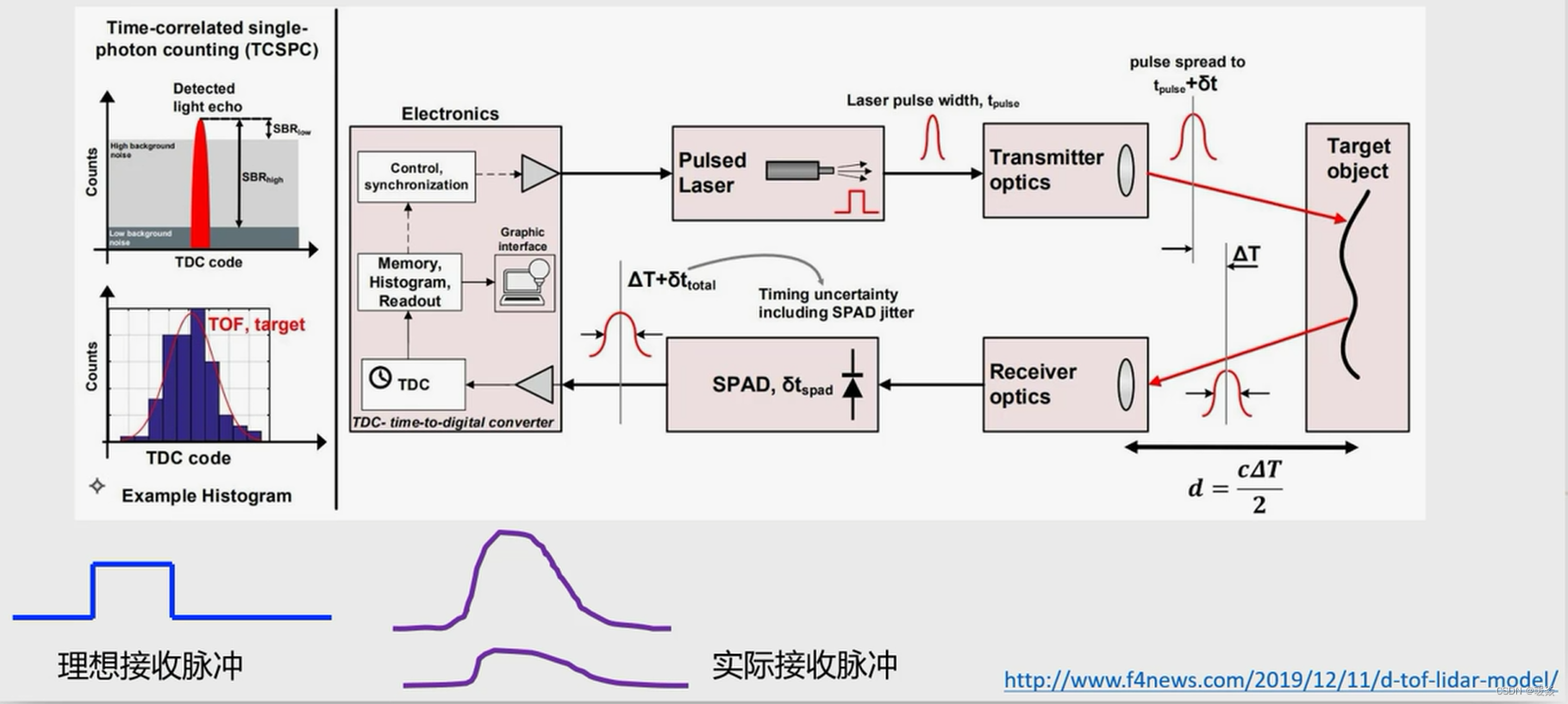
精确测量上升沿时间差受到距离、接收脉冲失真等影响。

相位法




2 三维数据的获取原理

RGBD


立体视觉测量法
相机成像模型




小孔成像模型(相机成像模型的理想情况)
小孔成像中没有畸变,但是在相机成像中,可能出现光心偏移或者透镜材质不均匀导致的畸变。



单目立体视觉
聚焦法
相机主动调焦,并使相机相对于被测点处于聚焦位置,然后根据透镜成像公式求得被测点相对于相机的距离。相机偏离聚焦位置会带来测量误差,因此寻求精确的聚焦位置是关键所在。
离焦法
不要求相机相对于被测点处于聚焦位置,而是根据标定出的离焦模型计算被测点相对于相机的距离,这样就避免了由于寻求精确的聚焦位置而降低测量效率的问题,但离焦模型的准确标定是该方法的主要难点。
单目棱镜法(变向实现多目)
主要应用于微观结果或光学研究。

双目立体视觉
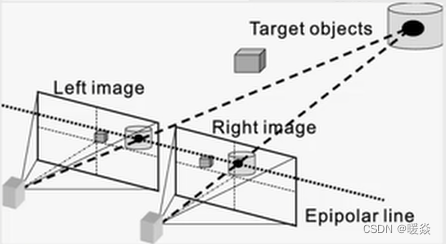

双目视觉是利用视差原理计算深度。两幅图片因为相机视角不同带来的图像的差别构成视差。1、首先需要对双目相机进行标定得到两个相机的内外参数、单应矩阵(一张图像到另一张图像的转换矩阵)。
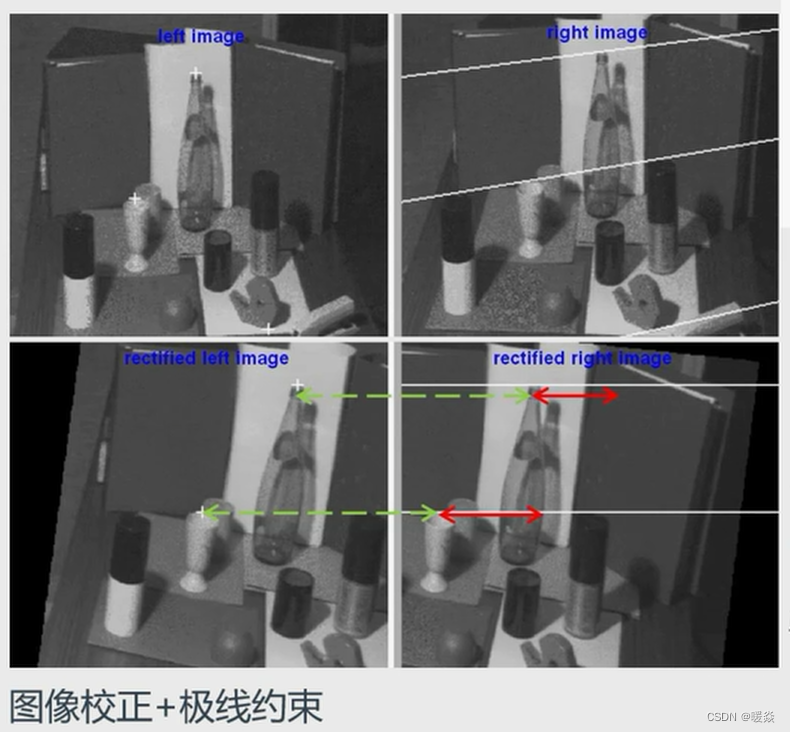
2、根据标定结果对原始图像校正,校正后的两张图像位于同一平面且互相平行。
3、对校正后的两张图像根据极线约束进行像素点匹配。
4、根据匹配结果计算每个像素的深度,从而获得深度图。理想情况


非理想情况


案例
图像矫正和极线约束后,两张图像中的相同物体会在一个高度,通过左图中的坐标位置,在右图中窗口搜索相同坐标位置前后寻找差异最小的窗口。

公式中d是视差。

深度越大,角度越小,视差越小。
窗口越大,深度图越模糊。

如何评价双目视觉?
对边界处深度的估计,无纹理地方的估计,渐变面的深度估计,遮掩地方的估计,还有计算的时间,内存。
主动双目视觉



利用投影在物体上的图案,帮助两个相机计算双目匹配。有多种可能的投影图案,一个方案是使用伪随机散斑。


主动双目视觉测量法与结构光测量法没有明显的界定,主动双目视觉测量法有两个相机,结构光测量法只用一个相机。结构光3D成像法


上图左上角图中为什么不使用TOF测量法?
距离很近的情况下,如果使用TOF测量法对芯片的精确度要求很高。点结构光
使用单个点结构光 (e.g.激光点)扫描整个对象。传感器检测物体反射的结构光,使用三角测量法,计算从物体到扫描仪的距离。



线结构光
使用三角测量法,利用投影仪在物体投射一系列结构化线束。通过检测光线的边缘,计算出从扫描仪到物体表面的距离。
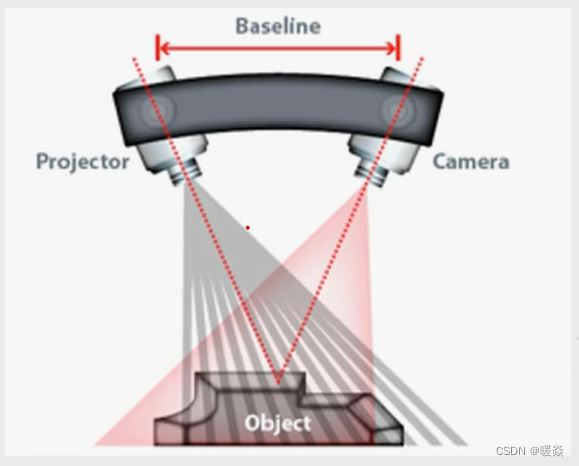



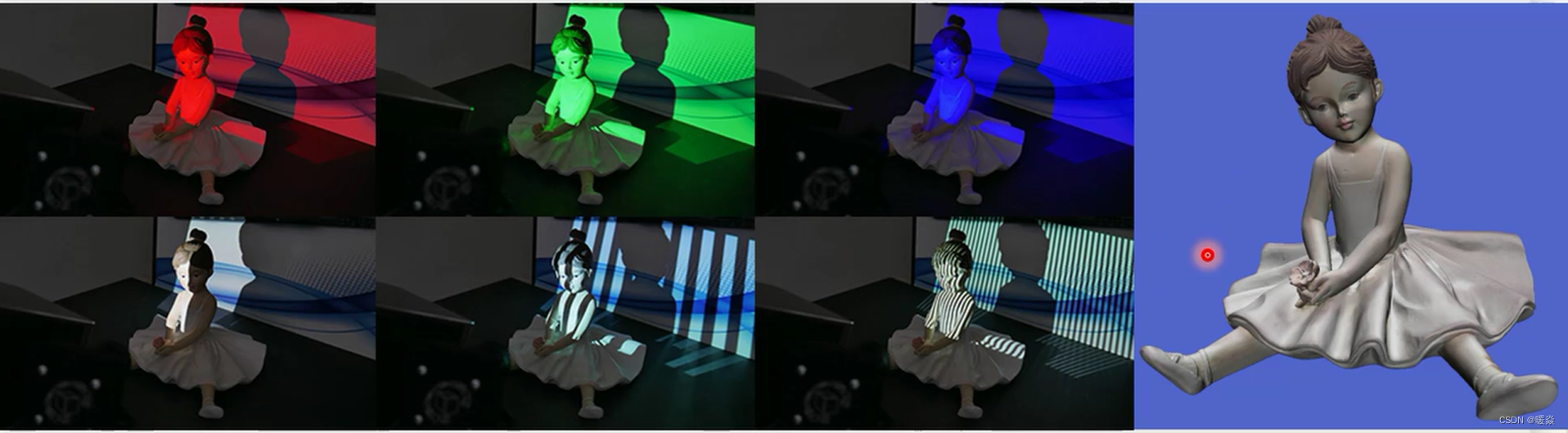
面结构光


投影面结构光到物体表面,需要对面结构光进行编码,知道每个面结构光中的点与所成像中像素的对应关系,然后进行计算。如何设计结构光的结构?
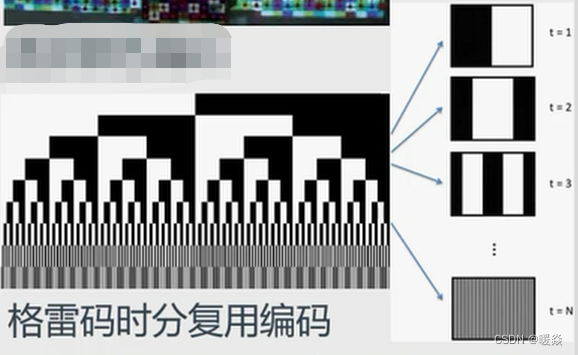
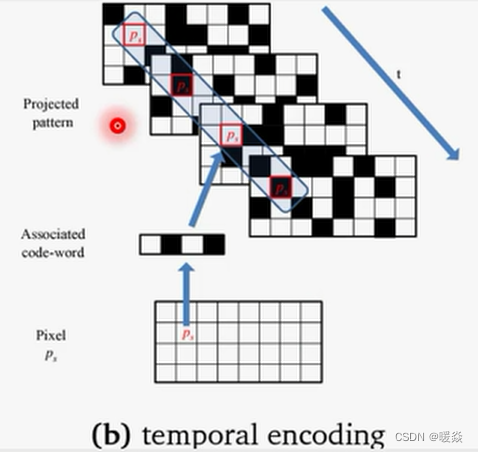
直接编码,时分复用,空分复用
直接编码


时分复用
空分复用


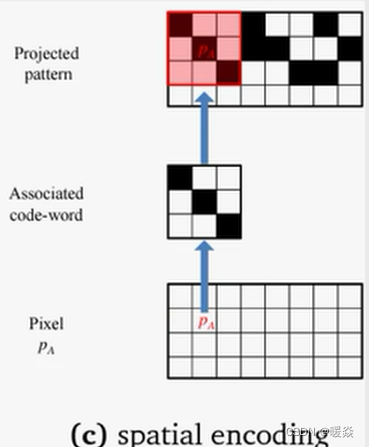
核心问题:散斑结构必须不重复。
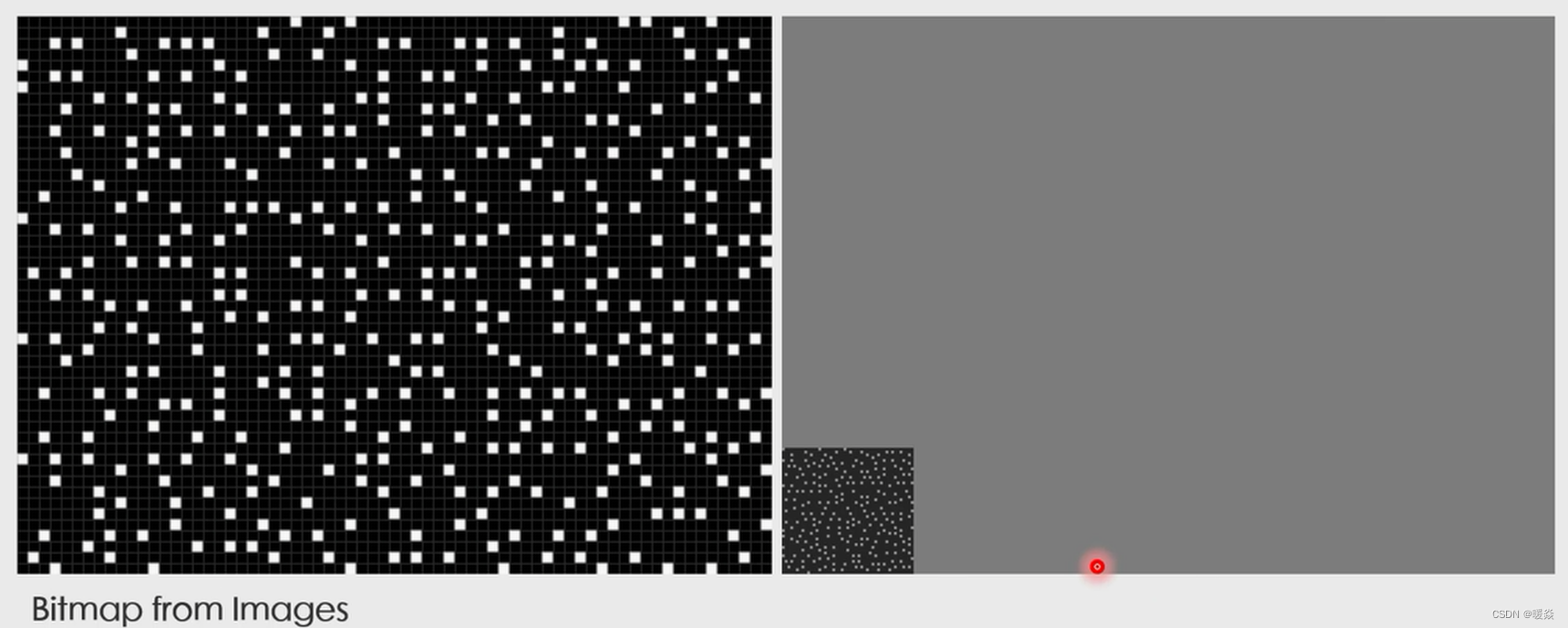
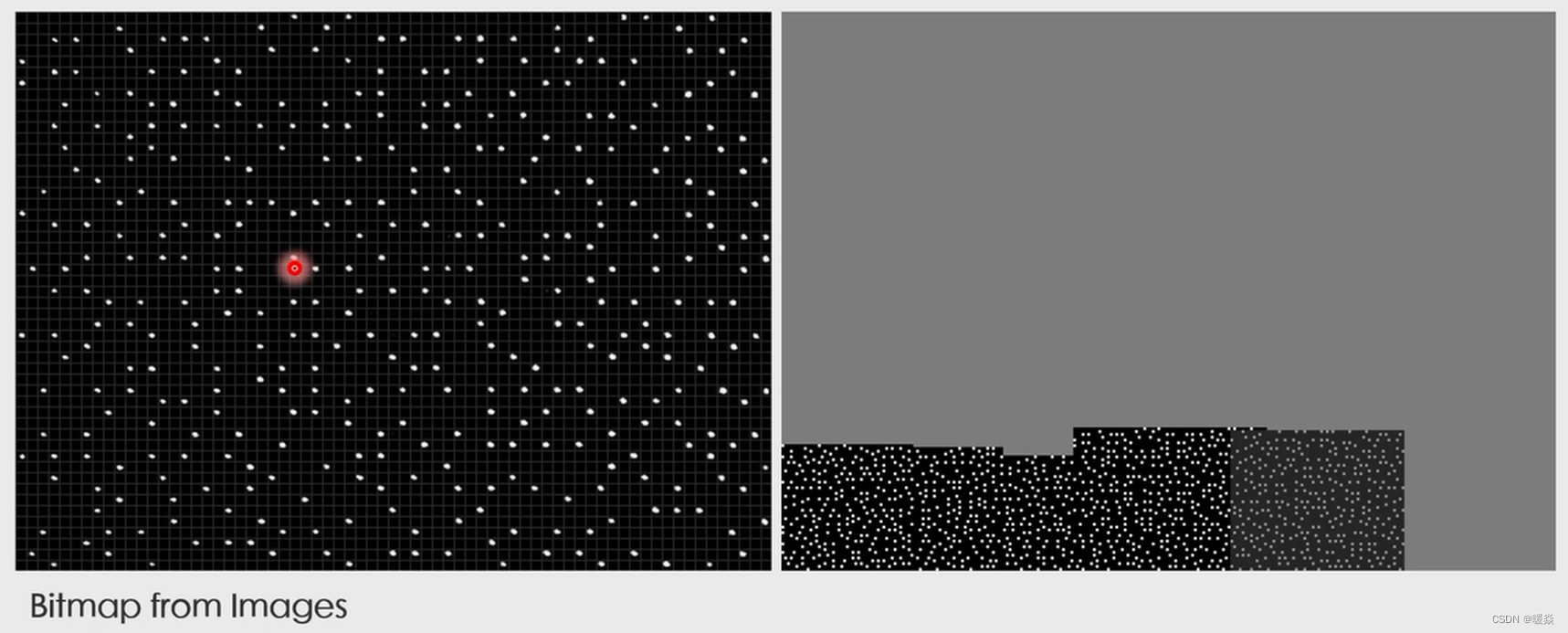
如何设计不重复的散斑结构?
栅格化得到bitsmap

多目立体视觉
机器人系统里应用的多。

3 三维信息的表征形式
图片来源 http://graphics.stanford.edu/courses/cs468-17-spring/
点云 PointCloud


参数化曲线曲面 Parametric Surface
参数化曲线

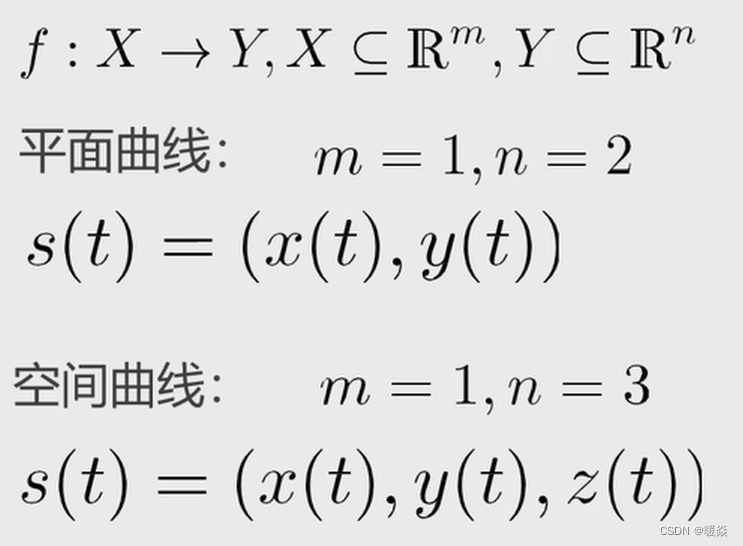
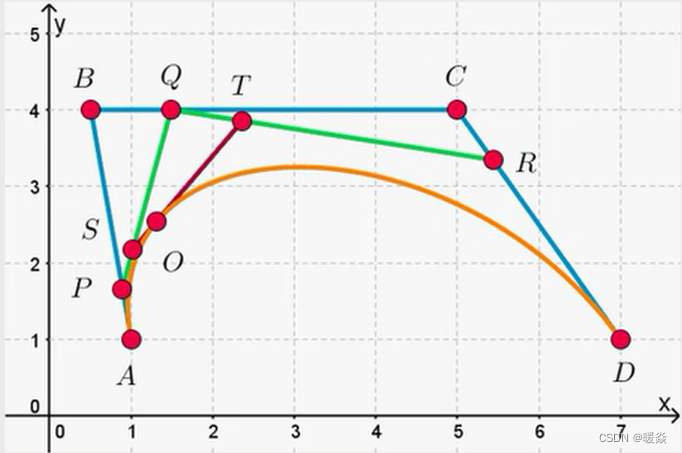
常用参数化曲线
贝塞尔曲线(应用:样条线)



参数化曲面
参数化曲面表示


优点
容易生成曲线或者曲面上的点
参数分离,容易分析缺点
难以确定内部外部空间
难以判断点是否在曲面曲线上
难以生成非常复杂的曲线曲面(解决:局部表面(多边形面元))常见的参数化曲面
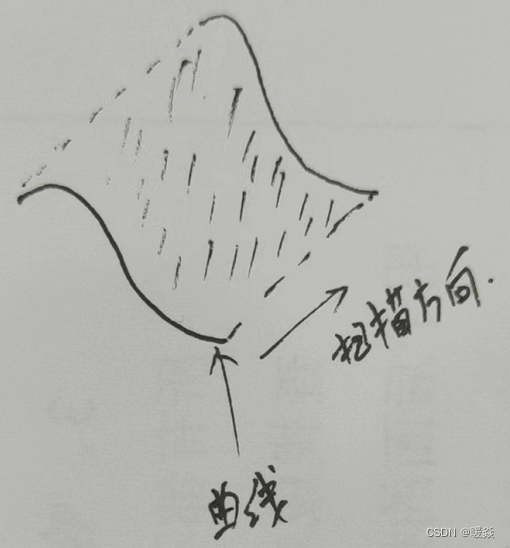
曲线扫描得到曲面


贝塞尔曲面


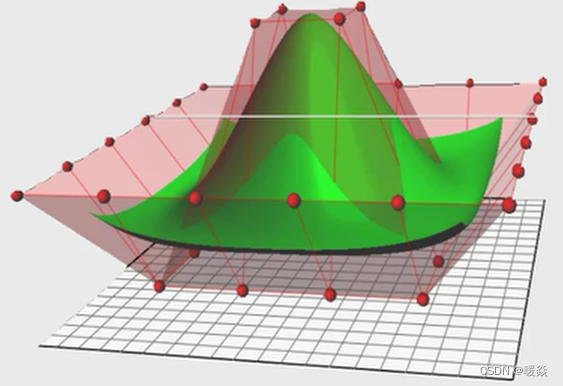
隐式曲线曲面 Implicit Surface
隐式曲面表示





优点
容易确定内部外部空间。
容易确定点是否在曲线曲面上。缺点
难以生成曲线曲面上的点。
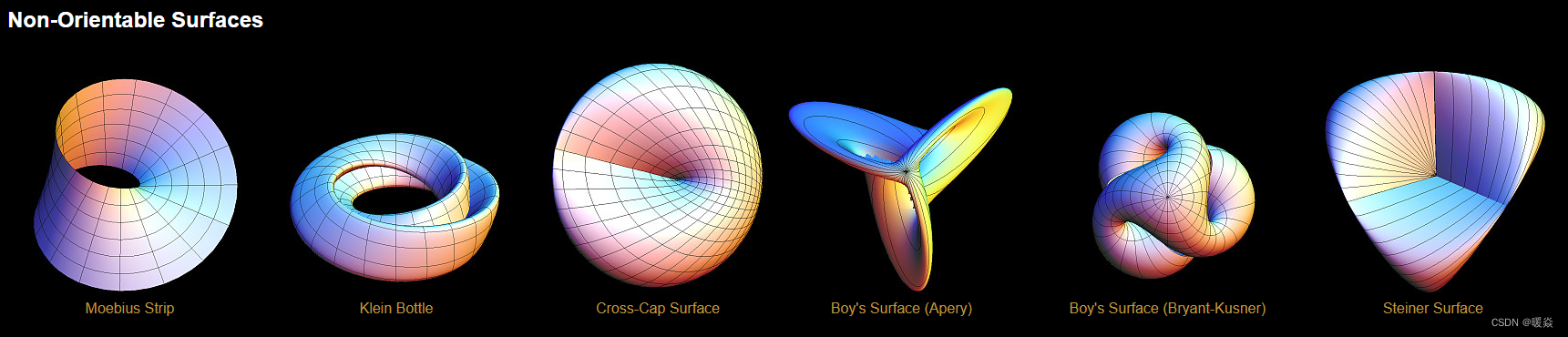
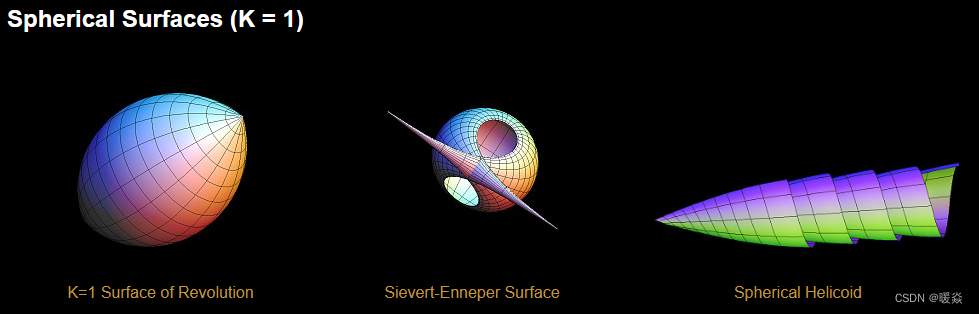
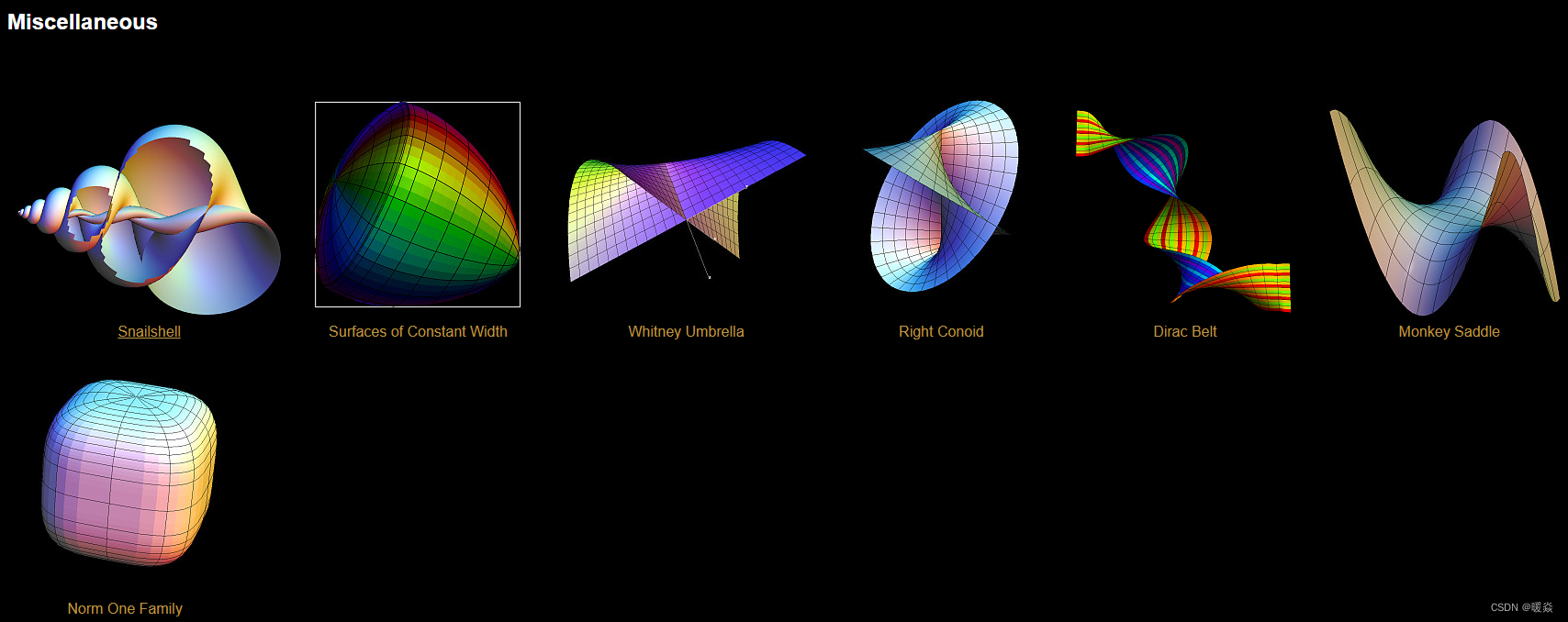
不适合实时渲染。常见隐式曲面
图片来源:https://virtualmathmuseum.org/Surface/gallery_o.html






细分曲面 Subdivision Surface

多边形面元 Mesh

分的越精细拟合的越好。

量化误差可控(分的越精细拟合的越好)
应用于任意拓扑结构
支持动态调整
可以利用GPU高效运算常见多边形面元
多边形面元(多边形剖分)
多边形

数学表征

性质
每条边至少属于一个多边形。

每个Q_i定义了多边形网格的一个面。

顶点的度=关联边的数目

多边形面元的边界

三角面元(三角剖分)
多边形面元,其中每个面是三角形。
简化数据结构
简化渲染
简化算法
每个面都是平面和凸的
任何多边形都可以三角化

数学表征
顶点V,边E,面F,

优点
简化数据结构
简化渲染
简化算法
每个面都是平面和凸的
任何多边形都可以三角化如何将点云转换为面元?
delaunay 三角剖分准则
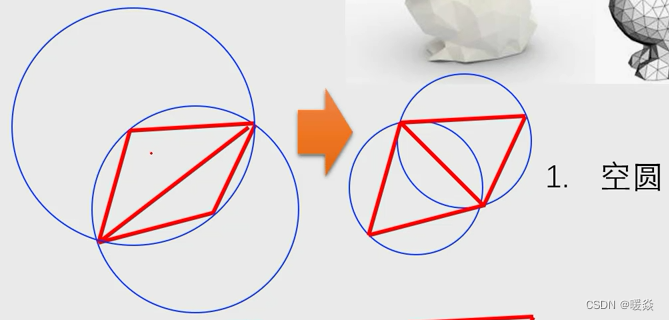
bowyer-watson 算法
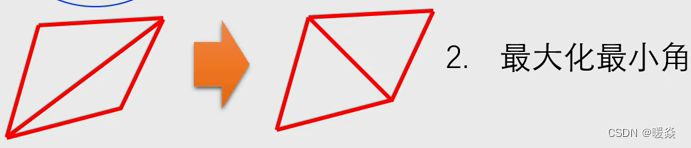
个人理解:最大化最小角应该是跟空圆本质要求是一样的,如果最小角不是最大就可能不是空圆。体素
无序点云有序化(类比像素)
空间体素化,占用格点0, 1(格子越小精度越高)
优点
快速检测空间点是否被占据。
运算速度快。
体像素之间的逻辑运算。体素是直接描述三维信息,所以在自动驾驶物体感知中也会经常使用到体素。
缺点
(稀疏)存储效率很低,特别在深度学习模型中问题突出。解决方法:稀疏卷积。

4 深度学习中的三维表征
4.1 点云研究中的三维表征

4.2 自动驾驶研究中的三维表征

5 点云的基本特征和描述


RGBD 两个不同视角下相比较,有相同有不同。点云基本特征
按照特征的物理属性,可以将特征分为:几何域,强度域
按照特征的空间尺度,可以分为:单点特征,局部特征,全局特征
点云基本特征描述
法向量

邻域




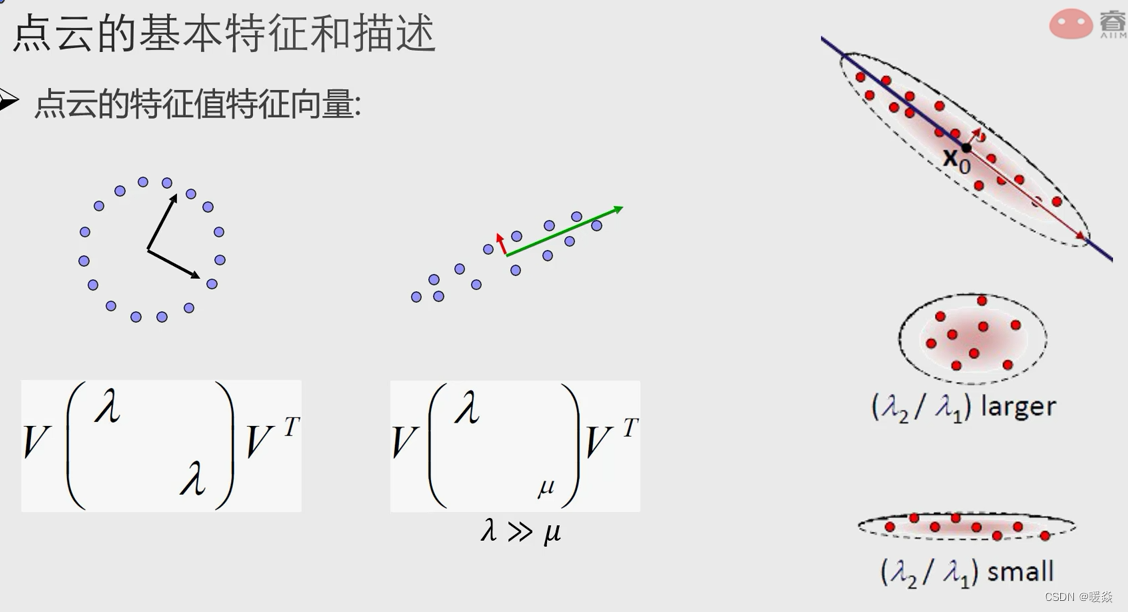
如何表述点云邻域? - 协方差矩阵的特征基
一维拟合直线,二维拟合平面,三维拟合包围框。

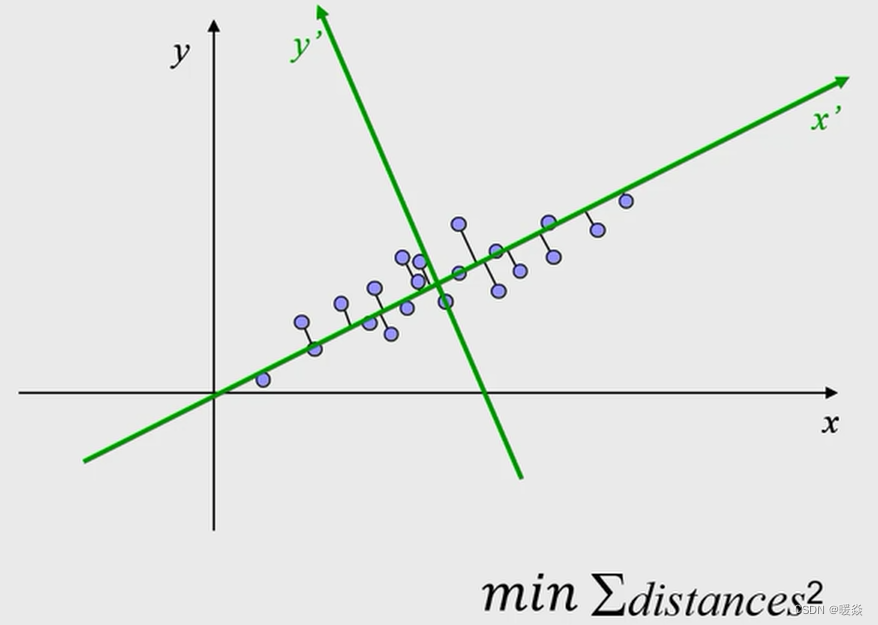
数据集在某个基上的投影值(也是在这个基上的坐标值)越分散方差越大,这个基保留的信息也就越多。
信息量保存能力最大的基向量一定是的协方差矩阵的特征向量,并且这个特征向量保存的信息量就是它对应的特征值.










为什么协方差矩阵的特征向量是投影方差最大的方向?
证明一:拉格朗日乘数法

证明二:瑞利熵

不同特征值大小的描述



-
相关阅读:
如何对非线性【SVM】进行三维可视化
DS1339C串行实时时钟-国产兼容RS4C1339
静态住宅代理是什么?为什么要选择它?
特征筛选还在用XGB的Feature Importance?试试Permutation Importance
基于CPLD的VHDL代码学习、解析
【Hack The Box】linux练习-- Pandora
我用PYQT5做的第一个实用的上位机项目(四)
【Python Web】Flask框架(五)Bootstrap登录和后台管理案例
.Net之接口小知识
【jmeter 5.5】 完全手册
- 原文地址:https://blog.csdn.net/guai7guai11/article/details/127276920