-
常见Lidar点云数据处理及可视化软件汇总
《点云数据处理与应用专栏》介绍:讲述目前最先进点云数据采集手段(三维激光扫描仪、无人机倾斜摄影测量、激光雷达Lidar等)、点云数据后处理软件(CloudCompare、Pix4D、Lidar360、PCL库、Globalmapper等)的实验操作教程,适用于在校学生、老师及三维建模从业者。
严重声明:本文由CSDN博主[刘一哥GIS]原创,原文地址:https://geostorm.blog.csdn.net/article/details/127948727。
1. CloudCompare
CloudCompare主要是点云处理软件,可以加载txt、las、laz、pcd、ply等格式的点云文件以及快速加载大量点云数据,并能进行点云处理算法(配准,重采样,颜色/法向矢量/标量字段管理,统计数据计算,传感器管理,交互式或自动分段等)以及显示增强工具(自定义色带,颜色,法线向量处理,校准图片处理,OpenGL着色器,插件等)。

CloudCompare的主要特点和功能包括:- 支持多种点云数据格式导入和导出:CloudCompare支持导入和导出多种点云数据格式,如PLY、XYZ、LAS、PTS等,方便用户进行数据处理和交换。
- 强大的点云处理和编辑工具:CloudCompare提供了一系列功能强大的点云处理和编辑工具,包括滤波、采样、配准、分割等操作,帮助用户获取更准确的数据或提取感兴趣的部分。
- 独特的八叉树结构:CloudCompare依赖于一种特定的八叉树结构,在进行点云对比这类任务时具有出色的性能,从而实现在一台标准笔记本电脑上处理大规模的点云——通常超过1000万个点云。
- 扩展性和灵活性:CloudCompare具有灵活的扩展性,方便用户根据具体需求进行功能定制和扩展,例如点云和三角形网格之间的比较等功能。
- 友好的用户界面:CloudCompare具有友好的用户界面,支持中文版,帮助用户更方便地进行操作和使用。
CloudCompare下载及安装教程:CloudCompare中文版下载与安装图文教程
2. Globalmapper
Global Mapper 是一款地图绘制软件,不仅能够将数据(例如:SRTM数据)显示为光栅地图、高程地图、矢量地图,还可以对地图作编辑、转换、打印、记录GPS及利用数据的GIS(地理信息系统)功能。航测中通常用Globalmapper进行点云分类生成高程点和等高线。

Globalmapper中文汉化版V24.0下载及安装:《GlobalMapper中文实战精品教程》专业知识学习专栏:
3. Pix4d
专业的摄影测量和无人机测绘软件,空三运算能力和精度相当不错。也可用于点云数据处理,无人机航测项目中,通常用该软件进行Pix4d空三后处理:点云分类与过滤、DSM精编生成DEM、生成等高线。

Pix4Dmapper是一款目前比较流行的无人机摄影测量后处理软件,是实现无人机自动航测功能的三维建模软件,软件集全自动、快速、专业精度为一体的无人机数据和航空影像处理于一体,帮助用户实现云计算功能,快速的生成最精准的报告等。主要的功能包括自动快速匹配、DSM生成、DOM生成、点云(分类着色)生成等等。
主要特点:
- 自动化处理:Pix4Dmapper的整个过程完全自动化,不需要专业知识,它可以从数千张影像快速制作成专业的的二维地图和三维建模,大大提高了处理效率。
- 完善的工作流:Pix4Dmapper可以把原始航空影像变为用户所需的DOM、DSM和三维模型数据,而且成果输出多种格式,适用于各种应用行业的软件。
- 自动获取相机参数:Pix4Dmapper可以自动从影像EXIF中读取相机的基本参数,例如:相机型号、焦距、像主点等,智能识别自定义参数,使得数据处理更为便捷。
总的来说,Pix4Dmapper是一款功能强大的无人机数据和航空影像数据处理软件,其特点主要体现在它的自动化处理、完善的工作流以及自动获取相机参数等方面。
4. ArcGIS(Pro)
ArcGIS Pro是一种新的、以地图为中心的桌面应用程序,在原有的arcgis平台上继承了强大的数据管理、空间分析、可视化和制图功能;ArcGIS Pro具有更灵活、更优秀的3D模型呈现和编辑功能,但对计算机要求很高;ArcGIS Pro是一个综合的桌面应用程序,包括许多不同的应用程序和工具;ArcGIS Pro更偏向现代化,它的适应性更强,而arcgis则更专注于传统GIS应用。两者都有各自的优势和劣势,可以根据需求选择。

专业的GIS软件,提供了强大的点云数据处理能力,系列学习教程请点击。
ArcScene加载点云数据示例:

ArcGIS Pro加载无人机摄影测量点云: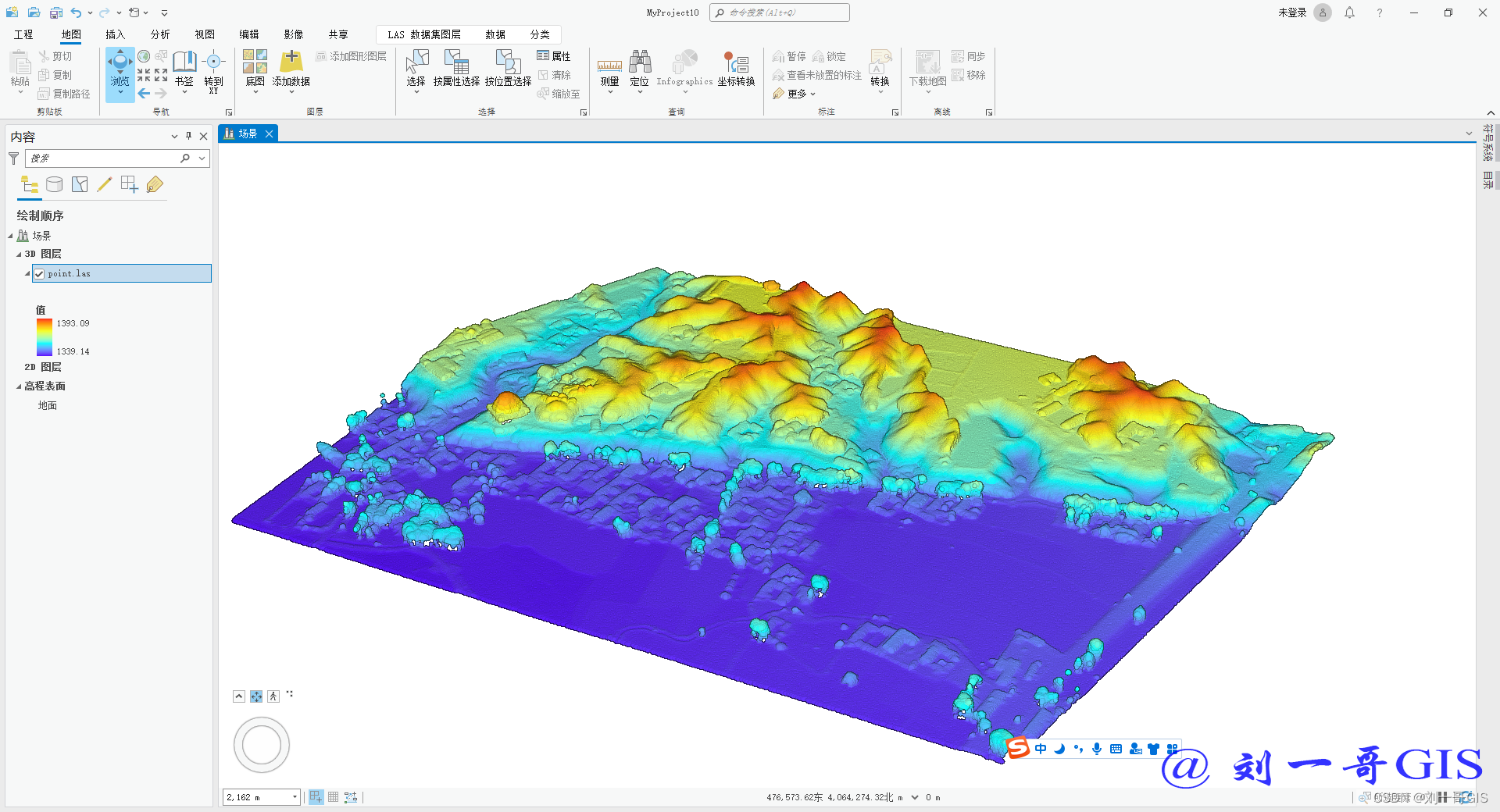
点云与DOM二三维联动显示:
5. Lidar 360
Lidar360是一款全方位激光雷达数据处理软件,它可以帮助用户处理激光雷达数据,包括数据导入、预处理、配准、分类、分割、建模等。

Lidar360具有以下特点:
- 强大的点云数据处理能力:Lidar360拥有超过10种先进的点云数据处理算法,可同时处理超过300G点云数据。
- 丰富的编辑工具和自动航带拼接功能:Lidar360为用户提供基本的点云和栅格数据管理工具,包括数据格式转换、点云去噪、归一化、栅格波段运算等,并能自动匹配来自不同航带的数据,实时显示拼接结果,生成高精度点云。
- 地形模块包含用于标准地形产品生产的一系列工具:点云滤波算法可精确提取复杂环境下的地面点,从而提高地形测绘精度,同时可以通过点云与影像融合生成真正射影像等产品。
- 提供多种分类功能:包括地面点分类、模型关键点分类、选择区域地面点分类、机器学习模型分类(可高效地分离建筑、植被、路灯等通用类别)、深度学习模型分类、自定义深度学习分类等。
- 强大的可视化功能:Lidar360可以将处理后的数据以三维形式呈现出来,帮助用户更好地理解和分析数据。
总的来说,Lidar360是一款非常优秀的全方位激光雷达数据处理软件,可以帮助用户高效地处理激光雷达数据,并且具有强大的可视化功能。
6. PCL
PCL(Point Cloud Library)是在吸收了前人点云相关研究基础上建立起来的大型跨平台开源C++编程库,它实现了大量点云相关的通用算法和高效数据结构,涉及到点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等。支持多种操作系统平台,可在Windows、Linux、Android、Mac OS X、部分嵌入式实时系统上运行。如果说OpenCV是2D信息获取与处理的结晶,那么PCL就在3D信息获取与处理上具有同等地位,PCL是BSD授权方式,可以免费进行商业和学术应用。

PCL(Point Cloud Library)是一个大型跨平台的开源C++编程库,专注于点云相关的通用算法和高效数据结构的实现。以下是PCL的主要特点:- 广泛的应用领域:PCL涵盖了多个领域,包括点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建和可视化等。
- 跨平台兼容性:PCL支持多种操作系统平台,如Windows、Linux、Android、Mac OS X,以及部分嵌入式实时系统。
- 强大的算法实现:PCL集成了大量的点云处理算法,例如,基于点的特征配准算法,这种算法在处理大规模点云数据时具有较高的准确性和效率。
- BSD授权:PCL采用BSD授权方式,允许用户免费地进行商业和学术应用。
总的来说,PCL是一个功能强大且广泛应用的开源点云处理库,具有跨平台兼容性,并提供了大量点云处理的算法和数据结构。
持续更新中,敬请关注!
-
相关阅读:
【JMeter】控制器If Controller
Polygon Miden交易模型:Actor模式 + ZKP => 并行 + 隐私
Sharding-JDBC实现读写分离
FPGA面试笔试一些基础概念题目
完整测试流程
vue中props设置默认值-父组件给子组件传值的写法——简略、带类型、带类型和默认值、带校验
Stable Video文本生成视频公测地址——Scaling Latent Video Diffusion Models to Large Datasets
JuiceFS 在多云存储架构中的应用 | 深势科技分享
cocotb教程(一)
代码随想录训练营Day 32|Python|Leetcode|● 738.单调递增的数字
- 原文地址:https://blog.csdn.net/lucky51222/article/details/127948727