-
目标检测论文解读复现之十一:基于特征融合与注意力的遥感图像小目标检测
前言
此前出了目标改进算法专栏,但是对于应用于什么场景,需要什么改进方法对应与自己的应用场景有效果,并且多少改进点能发什么水平的文章,为解决大家的困惑,此系列文章旨在给大家解读最新目标检测算法论文,帮助大家解答疑惑。解读的系列文章,本人已进行创新点代码复现,有需要的朋友可关注私信我。
一、摘要
为解决遥感图像小目标检测中目标特征信息量少、定位困难等难题,本文提出一种基于特征融合与注意力的遥感图像小目标检测算法FFAM-YOLO(Feature Fusion and Attention Mechanism YOLO)。算法首先针对主干网络特征提取有效信息量少、特征图信息表征能力弱的问题,构造特征增强模块(Feature Enhancement Module, FEM)以融合较低层级特征图中多重感受野特征,提升算法主干网络的目标特征提取能力;其次,经主干网络提取得到高低层级特征图后,重构算法高低层级特征融合结构,利用特征融合模块(Feature Fusion Module, FFM)显著增强小目标的特征信息;然后,在通道注意力机制(EnhancedEfficient Channel Attention, E-ECA)与空间注意力机制(Spatial Attention Module, SAM)所组成的级联注意力机制(E-ECA SAM Module, ESM)作用下,更精确捕获小目标特征;最后,在输出的两路特征图上进行小目标检测并输出结果。实验结果表明,基于构建的遥感图像小目标数据集USOD(Unicorn Small Object Dataset),所提算法查准率达到91.9%,查全率达到83.5%,AP@0.5 达到89%,AP@0.5:0.95 达到32.6%,检测速率FPS达到120帧/s,具有一定的鲁棒性和实时性。
二、算法整体框架及核心创新点
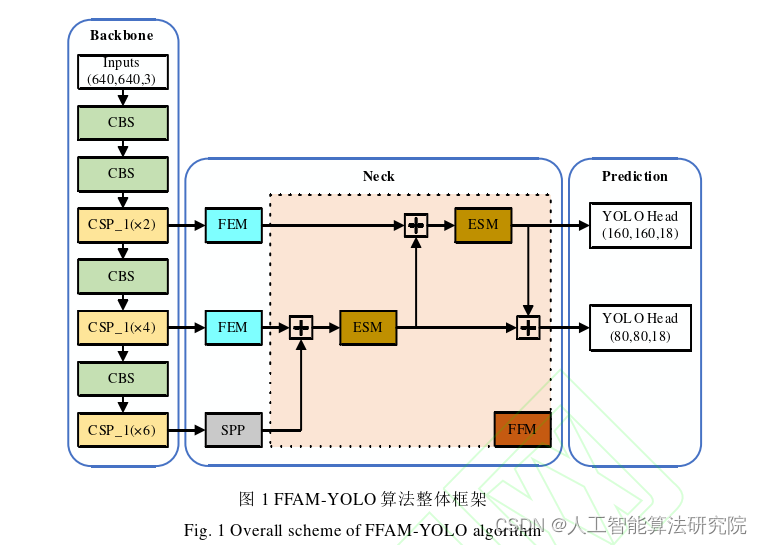 创新点:
创新点:1.特征增强模块 FEM

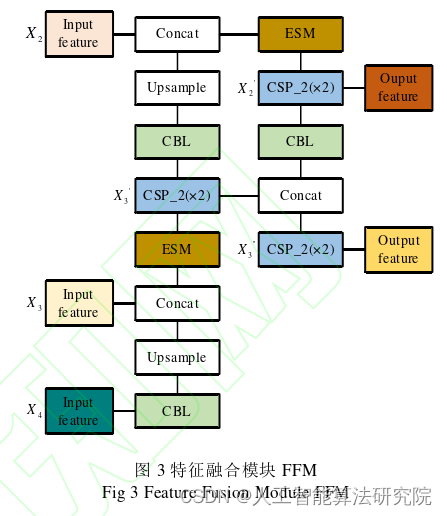
2.特征融合模块FFM
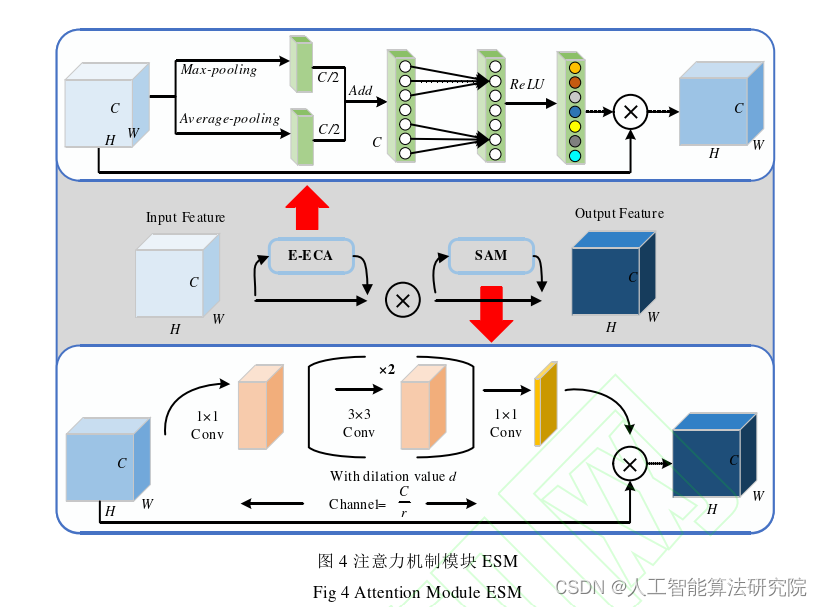
3.注意力机制ESM
三、应用数据集
本文基于美国空军实验室(US Air Force Research Laboratory, AFRL)所发布的UNICORN 2008[28],对其进行筛选、图像分割、人工补充标注并形成Unicorn小目标数据集USOD,用于实现遥感图像车辆小目标检测。
四、实验效果(部分展示)
1.为验证本文对FFAM-YOLO算法所提出的各改进模块对遥感图像小目标检测的影响,逐一对各个模块进行评估,评估结果如下表所示。

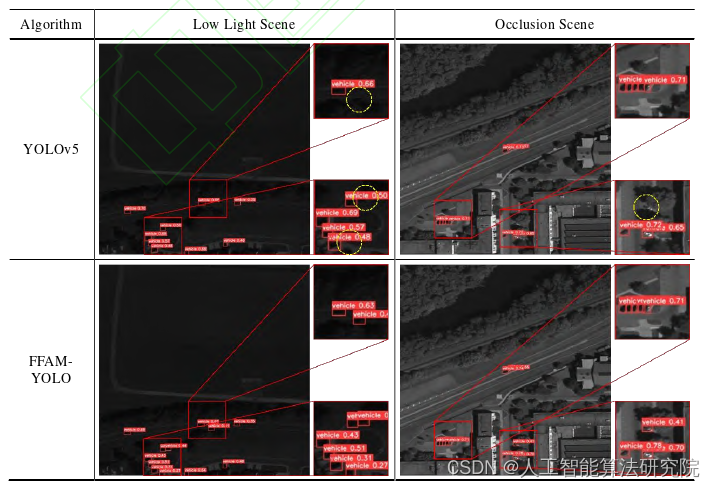
2. 如下图所示,展示了YOLOv5算法与FFAM-YOLO算法在光照度低场景、阴影遮挡场景的检测结果。
五、实验结论
USOD的实验结果表明,本文算法相较于其他算法有一定的提升,性能指标查准率为91.9%,查全率为83.5%,AP@0.5 为89%,AP@0.5:0.95 为32.6%,算法的准确性和实时性均得到保障。
六、投稿期刊介绍

注:论文原文出自张寅,朱桂熠,施天俊,张琨,闫钧华.基于特征融合与注意力的遥感图像小目标检测[J/OL].光学学报.
https://kns.cnki.net/kcms/detail/31.1252.O4.20220714.1843.456.html
解读的系列文章,本人已进行创新点代码复现,有需要的朋友可关注下面公众号,私信我。
-
相关阅读:
【算法】动态规划
SimVODIS++: Neural Semantic Visual Odometry in Dynamic Environments 论文阅读
日志门面slf4j与常用的日志框架Log4j,Logback和Log4j2
Springboot企业工资管理系统r9a51计算机毕业设计-课程设计-期末作业-毕设程序代做
PDF被限制会出现什么情况?
跑通一个十年年前的细分着色器示例
Java中JavaBean对象和Map的互相转换
问题:conda删除虚拟环境,报错no package names supplied
【无标题】
决策树 | 分类树&回归树:算法逻辑
- 原文地址:https://blog.csdn.net/m0_70388905/article/details/127928681