-
【ROS】机械人开发三--ROS工作空间与功能包
一、ROS工作空间
1.1 概念
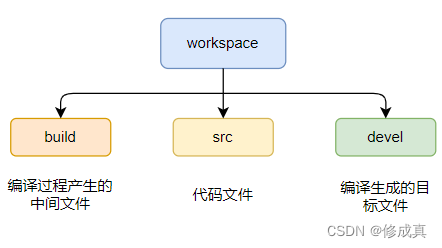
工作空间(workspace):存放工程文件的文件夹。
具体组成为:
1.2 创建工作空间
① 创建文件夹
mkdir -p ~/catkin_ws/src- 1
② 进入文件夹
cd ~/catkin_ws/src- 1
③ 初始化工作空间
catkin_init_workspace- 1
1.3 编译工作空间
④ 返回上一级
cd ..- 1
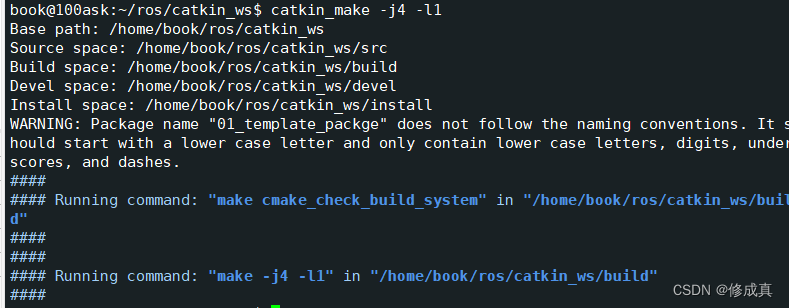
⑤ 编译工作空间
catkin_make- 1
1.4 设置环境变量
⑥ 设置环境变量
source devel/setup.bash- 1
⑦ 查看ROS的环境变量
echo $ROS_PACKAGE_PATH- 1
1.5 添加环境变量
命令行输入:
vi ~/.bashrc- 1
最后一行添加:
source ~/ros/catkin/devel/setup.bash- 1
根据你创建的目录路径来。
别的命令
编译单独功能包::
catkin_make -DCATKIN_WHITELIST_PACKAGES="package_name"- 1
catkin_make -j -l- 1
多线程编程用于提高编译速度,但要根据你CPU的数量决定,超过的话会出问题
j:多少核编程
l:多少线程编程
例子:
二、功能包
2.1 概念
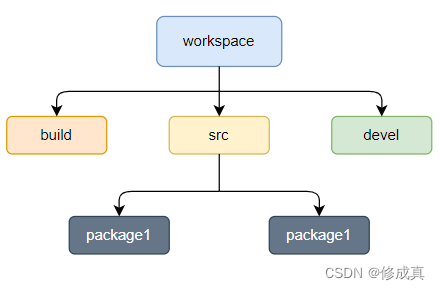
功能包(package):存放用户功能代码的文件夹。
具体如下:
2.2 功能包的内容
include文件夹: 包含.h文件(必要)launch文件: launch文件src文件夹: 包含.cpp文件(必要)urdf文件夹:.urdf文件config这类的文件夹:包含参数文件scripts这类的文件夹:包含可执行脚本文件(python脚本)CMakeLists.txt文件:定义编译的规则(必要)package.xml文件: 定义功能包(package)的属性(必要)
2.3 创建功能包
catkin_create_pkg[depend1] [depend2] [depend3] - 1
使用示例:
catkin_create_pkg new_package std_msgs rospy roscpp- 1
三、CMakeLists.txt文件
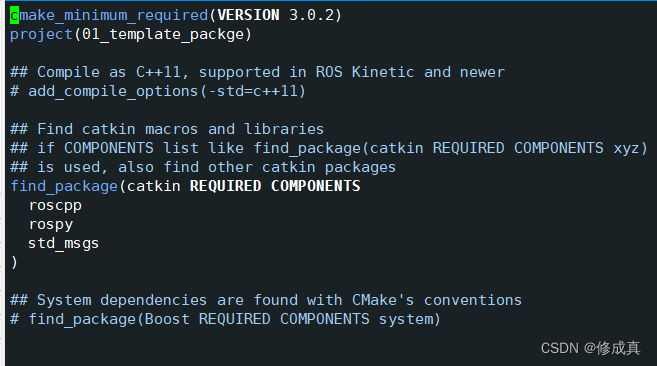
定义编译的规则
官方介绍网站:
cmakelists常用的cmakelists宏:
- cmake_minimum_required() :CMake版本
- project() :项目名称
- find_package() :添加依赖
- catkin_package() :编译生成信息导出
- add_executable() :生成可执行文件
- target_link_libraries() :可执行文件链接到库
部分文件截图:
其他的cmakelists宏:add_message_files() 添加话题消息类型文件 add_service_files() 添加服务消息类型文件 add_action_files() 添加行为消息类型文件 generate_messages() 生成消息文件 include_directories() 添加头文件路径 add_dependencies() 添加依赖项 add_library() 生成自定义的库 install() 安装规则- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
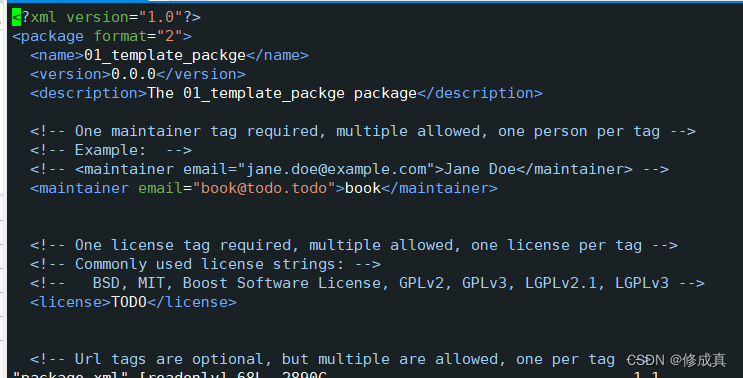
四、package.xml文件
功能包的描述信息,文件使用的是标签语言
官方介绍网站:
package.xml必要标签:
根标签。。。 包名 开源许可 维护者 描述 版本号 - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
可选标签:
指定依赖项为编译、 导出、 运行需要的依赖 编译依赖项 导出依赖项 运行依赖(旧版本是 ) 测试用例依赖项 编译构建工具 文档依赖项 - 1
- 2
- 3
- 4
- 5
- 6
- 7
到这里就结束啦!

-
相关阅读:
TCP为什么需要3次握手?
马拉车算法
提升办公效率,畅享多功能办公笔记软件Notion for Mac
TDengine 成功“晋级” Percona Live 2023 银牌赞助商,开发者驻足关注
网络爬虫之HTTP原理
Vue中如何扩展⼀个组件
Fabric.js 手动加粗文本iText
什么是 Art Blocks,如何投资生成艺术?
PyCharm配置Jupyter
函数定义、this指向、闭包等
- 原文地址:https://blog.csdn.net/qq_51447215/article/details/127872499