-
【HDU No. 1043】 八数码 Eight
【HDU No. 1043】 八数码 Eight

【题意】
十五数码问题是由15块滑动的方块构成的,在每一块上都有一个1~15的数字,所有方块都是一个4×4的排列,其中一块方块丢失,称之为“x”。
拼图的目的是排列方块,使其按以下顺序排列:

其中唯一合法的操作是将“x”与相邻的方块之一交换。
下面的移动序列解决了一个稍微混乱的拼图:

上一行中的字母表示在每个步骤中“x”方块的哪个邻居与“x”交换;合法值分别为“r”“l”“u”和“d”,表示右、左、上和下。
在这个问题中,编写一个程序来解决八数码问题,它由3×3的排列组成。
【输入输出】
输入:
输入包含多个测试用例,描述是初始位置的方块列表,从上到下列出行,在一行中从左到右列出方块,其中的方块由数字1~8加上“x”表示。例如以下拼图

由以下列表描述:
输出:
如果没有答案,则输出“unsolvable”,否则输出由字母“r”“l”“u”和“d”组成的字符串,描述产生答案的一系列移动。字符串不应包含空格,并从行首开始。
【样例】

【思路分析】
本题为八数码问题,包含多个测试用例,同一题目的POJ1077数据弱,只有1个测试用例。要求通过x方块上下左右四个方向移动,经过最少的步数达到目标状态。例如,初始状态1 2 3 x 4 6 7 5 8,经过r、d、r等3步后达到目标状态。

三种做法:答案不唯一
可以采用A算法、IDA算法或打表解决。【1】 A* 算法
本题采用康托展开判断重复状态,以当前状态和目标状态的曼哈顿距离作为启发函数,评估函数为已走过的步数+启发函数,评估函数值越小越优先。
从初始状态开始,根据优先队列广度优先搜索目标状态。
① 预处理
首先将字符串读入,例如,1 2 3 x 4 6 7 5 8,将x 转换为数字8,其他字符1~8转换成数字0~7。转换之后的棋盘如下图所示。

用start.x 记录x 所在位置的下标,方便以后移动。
② 可解性判断
把除x外的所有数字排成一个序列,求序列的逆序对数。逆序对数指对于第i 个数,后面有多少个数比它小。例如,对于1 2 3 x 4 6 75 8,6后面有一个数5比它小,6和5是一个逆序对,7后面有一个数5比它小,7和5是一个逆序对,该序列共两个逆序对。数码问题可以被看作N ×N 的棋盘,八数码问题N =3,十五数码问题N =4。对于每一次交换操作,左右交换都不改变逆序对数,上下交换时逆序对数增加(N-1)、减少(N -1)或不变。
- N 为奇数时:上下交换时每次增加或减少的逆序对数都为偶数,因此每次移动逆序对数,奇偶性不变。若初态的逆序对数与目标状态的逆序对数的奇偶性相同,则有解。
- N 为偶数时:上下交换时每次增加或减少的逆序对数都为奇数,上下交换一次,奇偶性改变一次。因此需要计算初态和目标状态x相差的行数k ,若初态的逆序对数加上k 与目标状态逆序对数奇偶性相同,则有解。
八数码问题N =3,若初态的逆序对数与目标状态逆序对数奇偶性相同,则有解。本题目标状态的逆序对数为0,因此初态的逆序对数必须为偶数才有解。注意:统计逆序对数时x除外。
[算法代码]
bool check(node s){ //判断是否 有解【初态的逆序对数 为偶数】 int cnt = 0; for(int i = 0 ; i < 9 ; i++){ if(s.a[i] == 8){ continue; } for(int j = i + 1; j < 9 ; j ++){ if(s.a[j] < s.a[i] ){ cnt ++; } } } if(cnt % 2){ return 0; } return 1; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
③ 康托展开判重
在A*算法中,每种状态只需在第一次取出时扩展一次。如何判断这种状态已经扩展过了呢?可以设置哈希函数或使用STL中的map、set等方法。有一个很好的哈希方法是“康托(Cantor)展开”,它可以将每种状态都与0~(9!-1)的整数建立一一映射,快速判断一种状态是否已扩展。状态是数字0~8的全排列,共362 880个。将所有排列都按照从小到大的顺序映射到一个整数(位序),将排列最小的数012345678映射到0,将排列最大的数876543210映射到362880-1,如下图所示。

如果采用排序算法,则最快O (n !log(n !)),其中n =9。而康托展开可以在O (n^2 )时间内将一种状态映射到这个整数。康托展开是怎么计算的呢?例如,2031,求其在{0,1,2,3}全排列中的位序,其实就是计算排在2031前面的排列有多少个,可以按位统计,如下所述。
- 第0位的数字2:在2031中,2后面比2小的有两个数字{0,1}。以0开头,其他3个数字全排列有3!个,即(0123,0132,0213,0231,0312,0321);以1开头,其他3个数字全排列有3!个(1023,1032,1203,1230,1302,1320)。因此排在以2开头的数字之前共2×3!个数字。
- 第1位的数字0:在2031中,0后面没有比0小的数字。
- 第2位的数字3:在2031中,3后面比3小的有1个数字{1},前两位20确定,以1开头,剩余1个数字的全排列有1!个数字,即2013。排在3之前的共1×1!个数字。
- 第3位的数字1:在2031中,1后面没有比它小的数字。
因此2031的位序为2×3!+1=13。
位序计算公式:

其中,cnt[i ]为a [i ]后面比a [i ]小的数字个数,n 为数字个数。
8数码问题包含0~8共9个数字,首先求出0~8的阶乘并将其保存到数组中。然后统计在每一个数字后面有多少个数字比它小,累加cnt*fac[8-i ]即可得到该状态的位序。状态与位序之间是一一映射的,无须处理哈希冲突问题。
[算法代码]
fac[0] = 1; for(int i = 1; i < 9 ; i ++){ fac[i] = fac[i - 1] * i; } int cantor(node s){ //康托判重 int code = 0; for(int i = 0 ; i < 9 ;i ++){ int cnt = 0 ; for(int j = j + 1; j < 9 ; j ++){ if(s.a[j] < s.a[i]){ cnt ++; } } code += cnt * fac[8 - i]; } return code; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
④ 曼哈顿距离
A*算法的启发函数有多种设计方法,可以选择当前状态与目标状态位置不同的数字个数,也可以选择当前状态的逆序对数(目标状态逆序对数为0),还可以选择当前状态与目标状态的曼哈顿距离。本题选择当前状态和目标状态的曼哈顿距离作为启发函数。曼哈顿距离又被称为“出租车距离”,指行列差的绝对值之和,即从一个位置到另一个位置的最短距离。例如,从A点到B点,无论是先走行后走列,还是先走列后走行,走的距离都为行列差的绝对值之和。如下图所示,A和B的曼哈顿距离为2+1=3。

求当前状态与目标状态的曼哈顿距离,需要将两种状态上的数字位置转换为行、列,然后求行、列差的绝对值之和。例如,当前状态和目标状态如下图所示,将位置下标i 转换为行(i /3),转换为列(i %3)。当前状态的数字4的位置下标为7,转换为7/3行、7%3列,即2行、1列。目标状态的数字4的位置下标为4,转换为4/3行、4%3列,即1行、1列。两个位置的曼哈顿距离为|2-1|+|1-1|=1。

除了8(x滑块),计算当前状态和目标状态中每个位置的曼哈顿距离之和。曼哈顿距离为什么不需要计算8(x滑块)?因为其他数字都是通过和滑块交换达到目标状态的。例如下图中,当前状态只有数字7,与目标状态的数字7位置不同,差一个曼哈顿距离,与滑块交换一次,7即可归位。当所有数字都与目标状态的位置相同时,滑块自然跑到了它应该在的位置。如果计算8(x滑块)的曼哈顿距离,那么当前状态和目标状态的曼哈顿距离为2,很明显是错误的,进行一步交换就可以达到目标状态。

[算法代码]
int h(node s){ // 启发函数,曼哈顿距离【行列差 的绝对值之和】 int cost = 0; for(int i = 0 ; i < 9 ; i ++){ if(s.a[i] != 8){ cost += abs(i / 3 - s.a[i] / 3) + abs(i % 3 - s.a[i] % 3) } } return cost; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
⑤ A* 算法
[算法步骤]
(1) 创建一个优先队列,将评估函数f (t )=g (t )+h (t )作为优先队列的优先级,g (t )为已走过的步数,h (t )为当前状态与目标状态的曼哈顿距离,f (t )越小越优先。计算初始状态的启发函数h(start),计算初始状态的康托展开值cantor(start)并标记已访问,初始状态入队。
(2) 如果队列不空,则队头t 出队,否则算法结束。
(3) 计算康托展开值k_s=cantor(t ),从t 出发向4个方向扩展。
计算x 新位置 的行列值:
int row = t.x / 3 + dir[i][0]; //行 int col = t.x % 3 + dir[i][1]; //列 int newx = row * 3 + col; //转换为下标- 1
- 2
- 3
- 4
例如,如下图所示,当前状态x(数字8)的位置t .x=3,将其转换为 3/3=1行、3%3=0列,向右移动一格后,x的新位置为1行、1列,转换为下标为4。

如果新位置超出边界,则继续下一循环,否则令新旧位置上的数字交换,记录新状态x的位置。计算新状态的评估函数,nex.g++;nex.h=h(nex); ex.f=nex.g+nex.h; 计算新状态的康托展开值k_n=cantor(nex),如果该状态已被访问,则继续下一循环;否则标记已访问,并将新状态入队。
pre[k_n] = k_s; //记录新状态的前驱,康托展开值唯一 标识该状态 ans[k_n] = to_c[i]; //记录移动方向字符- 1
- 2
如果k_n=0,则说明已找到目标(目标状态康托展开值为0),返回。
[算法代码]
#include//A* 算法 #include #include #include #include #include using namespace std; const int N=362880+10; const int dir[4][2]={1,0,0,1,-1,0,0,-1}; const char to_c[]="drul"; struct node{ int f,g,h; int x;//'x'的位置 int a[9]; bool operator < (const node &a) const{ return f>a.f; } }; node start,nex; int fac[10],vis[N],pre[N]; char ans[N]; bool check(node s){//判断是否有解 int cnt=0; for(int i=0;i<9;i++){ if(s.a[i]==8) continue; for(int j=i+1;j<9;j++) if(s.a[j]<s.a[i]) cnt++; } if(cnt%2) return 0; return 1; } int cantor(node s){//康托判重 int code=0; for(int i=0;i<9;i++){ int cnt=0; for(int j=i+1;j<9;j++) if(s.a[j]<s.a[i]) cnt++; code+=fac[8-i]*cnt; } return code; } int h(node s){//启发函数,曼哈顿距离(行列差绝对值之和) int cost=0; for(int i=0;i<9;i++){ if(s.a[i]!=8) cost+=abs(i/3-s.a[i]/3)+abs(i%3-s.a[i]%3); } return cost; } void Astar(){ int k_s,k_n; priority_queue<node>q; while(!q.empty()) q.pop(); memset(vis,0,sizeof(vis)); start.g=0;start.f=start.h=h(start); vis[cantor(start)]=1; q.push(start); while(!q.empty()){ node t=q.top(); q.pop(); k_s=cantor(t); for(int i=0;i<4;i++){ nex=t; int row=t.x/3+dir[i][0]; int col=t.x%3+dir[i][1]; int newx=row*3+col;//转换为数字 if(row<0||row>2||col<0||col>2) continue; swap(nex.a[t.x],nex.a[newx]); nex.x=newx; nex.g++; nex.h=h(nex); nex.f=nex.g+nex.h; k_n=cantor(nex); if(vis[k_n]) continue; vis[k_n]=1; q.push(nex); pre[k_n]=k_s; ans[k_n]=to_c[i]; if(k_n==0) return; } } return; } int main(){ int judge,now; fac[0]=1; for(int i=1;i<9;i++) fac[i]=fac[i-1]*i; while(~scanf("%s",ans)){ if(ans[0]>'0'&&ans[0]<'9') start.a[0]=ans[0]-'0'-1; else if(ans[0]=='x') start.x=0,start.a[0]=8; for(int i=1;i<9;i++){ scanf("%s",ans); if(ans[0]>'0'&&ans[0]<'9') start.a[i]=ans[0]-'0'-1; else if(ans[0]=='x') start.x=i,start.a[i]=8; } if(!check(start)) {printf("unsolvable\n"); continue;} judge=cantor(start); now=0; Astar(); stack<int>s; while(judge!=now){ s.push(ans[now]); now=pre[now]; } while(!s.empty()){ printf("%c",s.top()); s.pop(); } printf("\n"); } return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122

OK,这是A* 算法 的实现方式
【2】 IDA* 算法
IDA*算法是带有评估函数的迭代加深DFS算法,本题设计评估函数f(t )=g (t )+h (t ),g (t )为已走过的步数,h (t )为当前状态与目标状态的曼哈顿距离。
[算法步骤]
(1) 从depth=1开始进行深度优先搜索。
(2) 计算当前状态与目标状态的曼哈顿距离t =h (),如果t =0,则说明已找到目标,ans[d ]=‘\0’,返回1。如果d +t >depth,则返回0。
(3) 从当前状态出发,沿4个方向扩展。
(4) 如果没有找到目标,则增加深度,++depth,继续搜索。
[算法代码]
bool dfs(int x, int d, int pre){ int t = h(); if(!t){ ans[d] = '\0'; return 1; } if(d + t > depth){ return 0; } for(int i = 0 ; i < 4 ; i ++){ int row = x / 3 + dir[i][0]; int col = x % 3 + dir[i][1]; int newx = row * 3 + col; //转换为数字 if(row < 0 || row > 2 || col < 0 || col > 2 || newx == pre){ continue; } swap(a[newx] , a[x]); ans[d] = str[i]; if(dfs(newx , d + 1, x)){ return 1; } swap(a[newx] , a[x]); } return 0; } void IDAstar(int x){ depth = 0; while(++ depth){ if(dfs(x , 0 , -1)){ break; } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
IDA算法优化算法: 上面的IDA算法深度从1开始,每次都增加1,这样搜索的速度不快。其实可以从初始状态到目标状态的曼哈顿距离开始,每次都增加上一次搜索失败的最小深度,从而提高搜索效率。HDU1043的提交运行时间在优化前为202ms,在优化后为124ms。
[算法步骤]
(1) 从depth=h()开始进行深度优先搜索。
(2) 计算当前状态与目标状态的曼哈顿距离t =h (),如果t =0,则说明已找到目标,ans[d ]=‘\0’,返回1。如果d +t >depth,则更新mindep=min(mindep,d +t ),返回0。
(3) 从当前状态出发,沿着4个方向扩展。
(4) 如果没有找到目标,则增加深度,depth=mindep,继续搜索。
[算法代码]
bool dfs(int x, int d , int pre){ int t = h(); if(!t){ ans[d] = '\0'; return 1; } if(d + t > depth){ mindep = min(mindep , d + t); return 0; } for(int i = 0 ; i < 4 ; i ++){ int row = x / 3 + dir[i][0]; int col = x % 3 + dir[i][1]; int newx = row * 3 + col; //转换为数字 if(row < 0 || row > 2 || col < 0 || col > 2 || newx == pre){ continue; } swap(a[newx] , a[x]); ans[d] = to_c[i]; if(dfs(newx , d + 1 , x)){ return 1; } swap(a[newx] , a[x]); } return 0; } void IDAstar(int x){ depth = h(); while(1){ mindep = inf; if(dfs(x, 0 , -1)){ break; } depth = mindep; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
【3】 打表
打表是一种典型的用空间换时间的技巧,一般指将所有可能需要用到的结果都事先计算出来,在后面需要用到时可以直接查表。当所有的可能状态都不多时,用打表的办法速度更快。从目标状态开始进行广度优先搜索,反向搜索所有状态,记录该状态的前驱及方向字符。
记录方向字符时,因为是倒推的,所以左移相当于前一状态到目标状态的右移,因此方向字符为r,如下图所示。
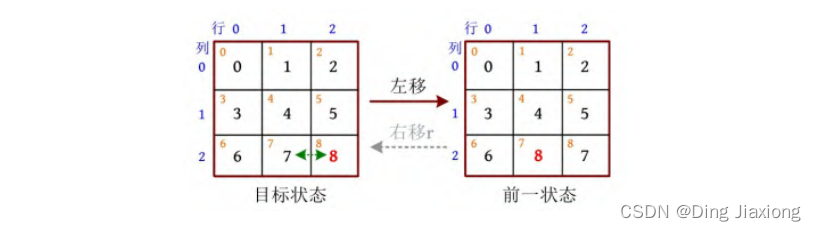
对每一个状态都用康托展开值作为唯一标识,如果求解从某一个状态到目标状态,则可以直接根据该状态的前驱数组找到目标状态。如果初始状态没被标记过,则说明从该状态无法到达目标状态。
[算法代码]
void get_all_result(){ //打表求解所有答案 int k_s , k_n; memset(vis , 0 , sizeof(vis)); for(int i = 0 ; i < 9 ; i++){ st.a[i] = i; } st.x = 8; vis[cantor(st)] = 1; q.push(st); while(!q.empty()){ node t = q.front(); q.pop(); k_s = cantor(t); for(int i = 0 ; i < 4 ; i ++){ node nex = t; int row = t.x / 3 + dir[i][0]; int col = t.x % 3 + dir[i][1]; int newx = row * 3 + col; //转换为下标 if(row < 0 || row > 2 || col < 0 || col > 2){ continue; } nex.a[t.x] = t.a[newx]; nex.a[newx] = 8; nex.x = newx; k_n = cantor(nex); if(vis[k_n]){ continue; } vis[k_n] = 1; q.push(nex); pre[k_n] = k_s; ans[k_n] = to_c[i]; } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
4种算法的运行时间及空间比较如下表所示。

-
相关阅读:
牛客TOP101-BM51
Python3.7+PyQt5 pyuic5将.ui文件转换为.py文件、Python读取配置文件、生成日志
贝叶斯分位数回归、lasso和自适应lasso贝叶斯分位数回归分析免疫球蛋白、前列腺癌数据...
flink-1.14.4启动报错setPreferCheckpointForRecovery(Z)v
[免费专栏] Android安全之Android应用的汉化功能(修改so中的字符串内容)
Session 和 Cookie 使用
【CV】树莓派+OpenCV-python解决摄像头分辨率及帧率过低无法调整问题
Vue-router的传参和跳转及高级使用
阿里云服务器上安装docker命令记录
计算机视觉与图形学-神经渲染专题-基于单目 RGB 视频的动画神经辐射场
- 原文地址:https://blog.csdn.net/weixin_44226181/article/details/127841125
