-
保边滤波之引导滤波与领域转换滤波
(1)引导滤波
局部窗口内输出图像O和引导图像G成线性关系Oi=akGi+bk, ∀i∈Ωk
假设输出图像O和输入图像I之间的关系为Oi=Ii−ni,噪声最小即最小化ni,即
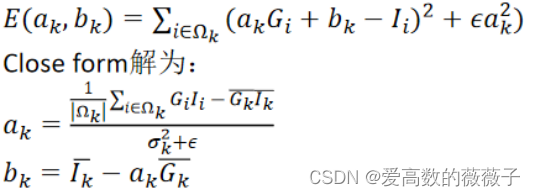
每个像素点i包含于多个窗口Ωk,每个窗口都会得到一个a、b值,对所有窗口得到的像素点i的a、b值做平均,a*G+b=O,得到输出图像O。
引导滤波中的半径r、规整项参数ϵ与双边滤波中的σs和σr^2
r越大,图像越模糊,ϵ越大,图像越模糊 (约束ak的平方不能太大)ak越小,导致akGi+bk-Ii差得很远,模糊。
引导滤波的滤波核:
Gi和Gk在均值的同一边,相似度高;在均值的不同边,相似度低。高相似度的值进行加权平均,起到保边的作用。
对比:
相比于双边滤波器,引导滤波可以有效去除梯度反转(Gradient reversal)
引导滤波器和双边局部滤波器都会产生halo伪像
引导滤波器没有spatial核,所以没有双边滤波器稳定,它只管颜色相似,不管位置。改进效果:
根据图片内容去调整模糊程度ϵ:WGIF,GGIF
边缘区域ϵ小一些
平坦区域ϵ大一些
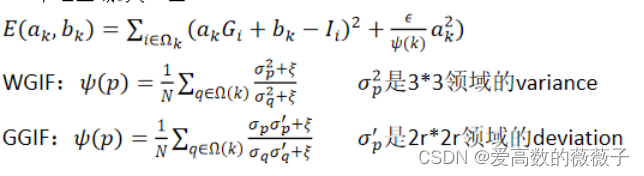
越平坦,根据GGIF,越小;越边缘,根据WGIF,越大
进一步提升速度:降采样。图片降采样,在降采样的图片上算a和b,再给a,b求均值,再给a,b直接上采样,再按公式算。(2)领域转换滤波
保边滤波结果=仿射矩阵输入图像->O=AI
如果能够将图像(三维数据点)数据映射到二维数据点,并且能够保证仿射矩阵不变,就能提高滤波效率,然而三维到二维的变换是不存在的,二维(一行或者一列图像)到一维的变换是存在的将二维上曲线的距离拉成一维上两个定义域的距离:
采用一范式,距离:|x1-x2|+|y1-y2|
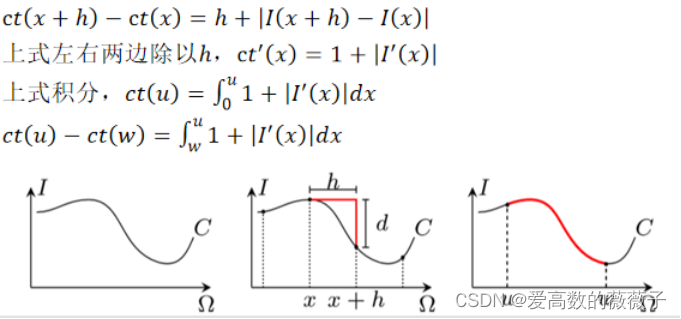
一维领域转换保边滤波:
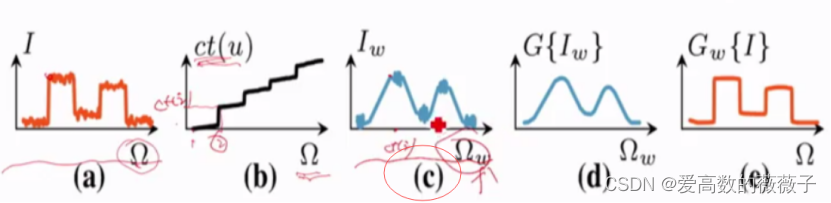
图C什么意思不太懂
在图像上,通常计算相似度的时候会考虑给定义域(Domain)和值域(Range)不同的权重σ,而在一维数据中,我们只有一个参数了,假设转换后的滤波核参数是σH=σs
转换时嵌入:
(谁更重要加个权)前面讲了图像的一行滤波,然而图像是二维的,在二维图像进行领域转换滤波,作者提出要迭代进行行滤波、列滤波,每个行滤波跟着一个列滤波。每次迭代降低滤波参数σH(以此去除条带状伪像)
第i轮的滤波参数
作者提出了三种一维上的滤波方法:NC IC RF
领域转换后并不是均匀采样。NC的原理是直接把缺失的点当0算,IC的原理是把缺失的点插值,按均匀采样在转换后的Domain里面做Box filter,r=√3σH
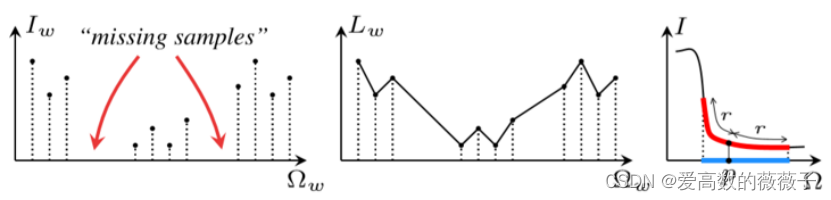
NC和IC原理图
RF递归滤波公式:

I代表原图像,J代表滤波输出
两点之间的梯度
定值在0到1
假设d很大,导致两点之间差异大梯度大,是个非常明显的边界,前面一点对它的影响很小。 -
相关阅读:
Zero-Copy零拷贝
npm install 报错问题解决合集
想学设计模式、想搞架构设计,先学学 UML 系统建模吧
力扣刷题 day56:10-26
springboot配置文件
C/C++内存对齐
第十天-自动化办公-word操作
H5判断当前环境是否为微信小程序
【机器学习】python机器学习使用scikit-learn对模型进行微调:使用RandomizedSearchCV对pipline进行参数选择
instanceclient安装与配置
- 原文地址:https://blog.csdn.net/passwordee/article/details/127833550