-
python机器人编程——基于单目视觉、固定场景下的自动泊车(上)
一、前言
本篇来讨论一下在固定场景下,如何仅通过单目视觉,实现差速小车的自动停靠,这种方式实现成本比较低,可适应的范围比较广,比如可以应用于小车的自动充电桩寻找、工位的最准等应用场景。我们还是尝试应用有限、浅显的数学对固定场景下,通过坐标的变换、几何的分析、结合单目摄像头获取的图像,进行相机位置(或者小车的位置)的估计,并控制差速小车行驶至我们预设的位置停靠。本篇先来构建小车位置的估计。
二、主要原理
(1)固定场景假设
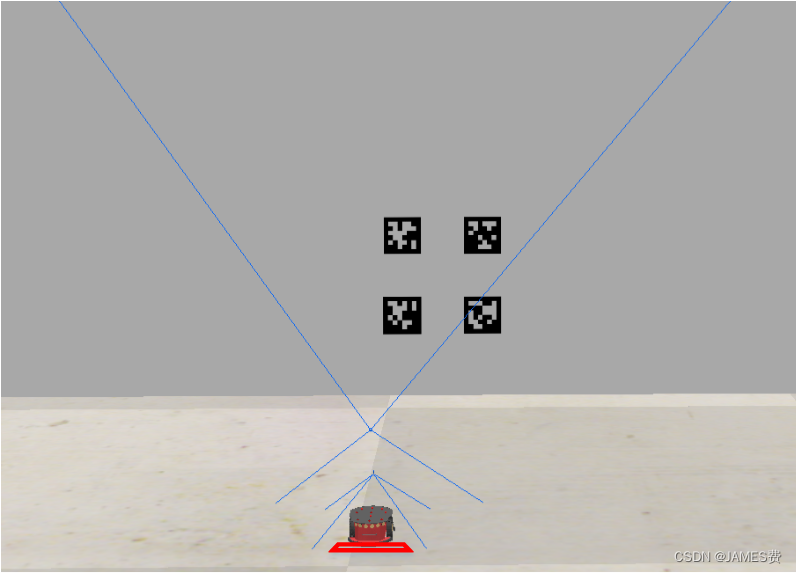
这里我们研究的场景不是室外或者开放环境的场景,我们对场景进行适当的简化,减少其它因素的影响,设置的场景是这样的,我们在墙上贴上三个二维码,充当人工的特征点,然后假设地面是水平的,相机固定在小车的正上方,朝向小车正前向位置。这样一来,可以知道,小车的运动,前后左右移动和转向,摄像头也跟着运动,且运动的自由度只有3个,即:
如图,相机在“相机运动平面”内运动(固定高度的平面内位置改变,只有xw,yw的变化),在运动平面内,随着小车的转向,相机沿着自身YC轴旋转,其它轴没有旋转运动。

如上图,我们约定目标位置(如停靠的车位)在O点,当前位置在A点,我们的任务就是根据当前获取的的图像和O点位置获取的图像进行对比计算,计算出A点相对于O点的位置。知道位置后,就可以生成一条运动轨迹线,这样就可以控制小车移动到目标点O。(2)相机位置关系分析
1)一般坐标变换关系
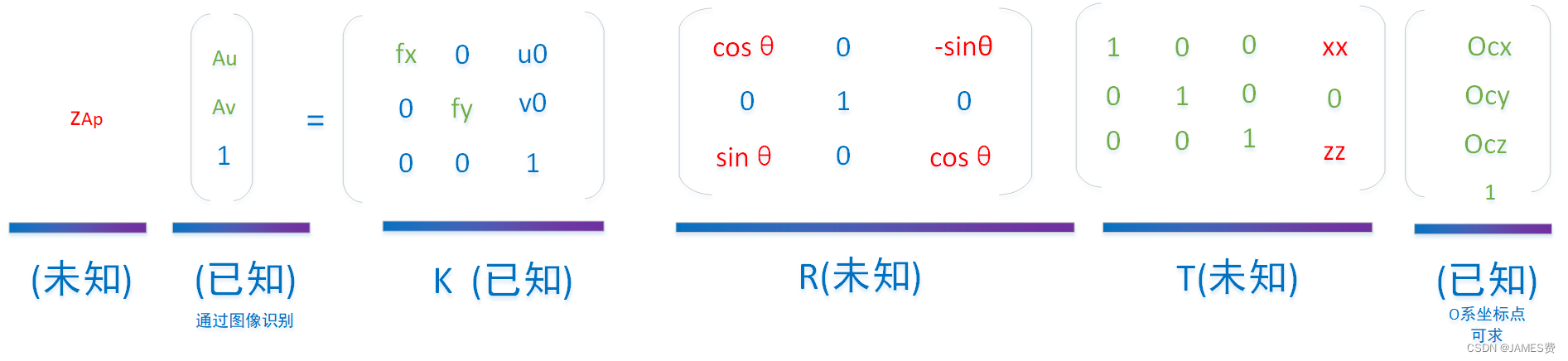
由相机的成像原理(主要是指小孔成像、相似原理),和三维坐标变换原理(主要是指三维坐标系的沿着x、y、z轴的移动和旋转),我们知道将一个在现实世界中的实物点(xw,yw,zw)投影到相机的照片图像上的一个点(u、v),需要经过一系列的坐标变换得到(由于这方面网上资料众多,这里不再赘述):
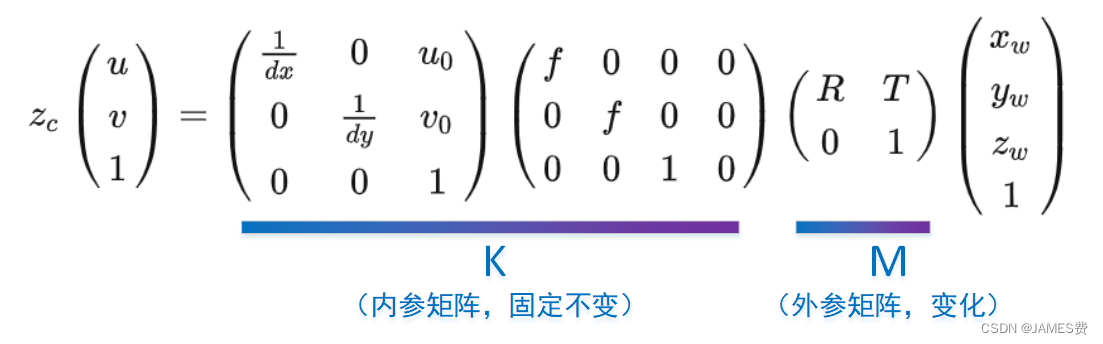
其中:
dx:图像中每个像素 x 轴的物理尺寸,单位:mm/pix
dy:图像中每个像素 y 轴的物理尺寸,单位:mm/pix
u0:图像的原点(中心)像素坐标u,单位:pix
v0:图像的原点(中心)像素坐标v,单位:pix
f:相机中心到成像平面的垂直距离(或焦距),单位:mm
R: 从世界坐标系到相机坐标系的旋转变换矩阵,是分别绕三个轴旋转矩阵的乘积,绕三个轴旋转的矩阵分别为:
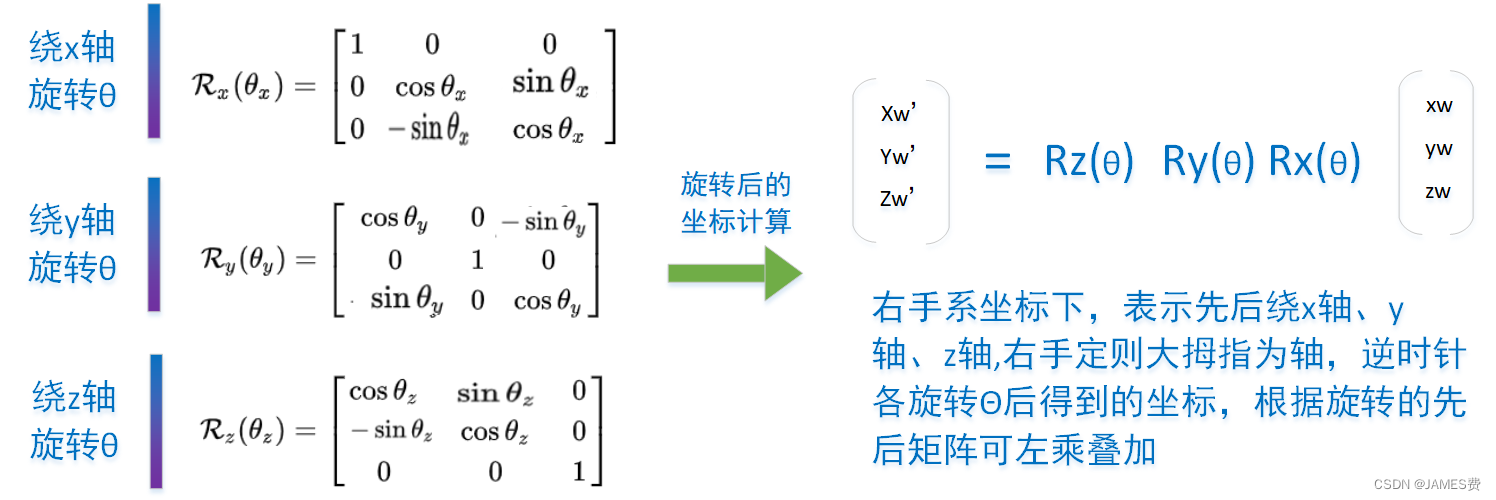
注意:此处为右手系坐标,顺逆符合右手定则
T:从世界坐标系到相机坐标系的平移变换(x、y、z方向的增减):

Zc:表示点在相机坐标系的z方向的坐标值,单位:mm。
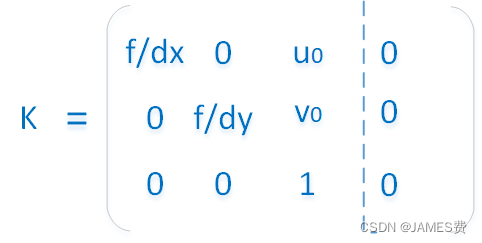
K:表示相机的内参矩阵:
根据以上的关系,我们在同一个相机不同位置看到的同一个点,在图像上表现为u、v的位置不同,那么在本篇的固定场景中,我们分别在O、A两个位置观察P0点,得到的图像计算如下:

然而,我们本次要解决的问题是,A位置如何运动到O位置的问题(或者是O位置如何运动到A位置的问题),如果我们设从O位置到A位置的运动(旋转、平移)的变换矩阵为M2,则利用从以上运算我们可以容易得出,一下关系:

M3是可以分解为两步运算的,然后再可以看出,等式右边部分,其实是就是跟O位置的相关的:
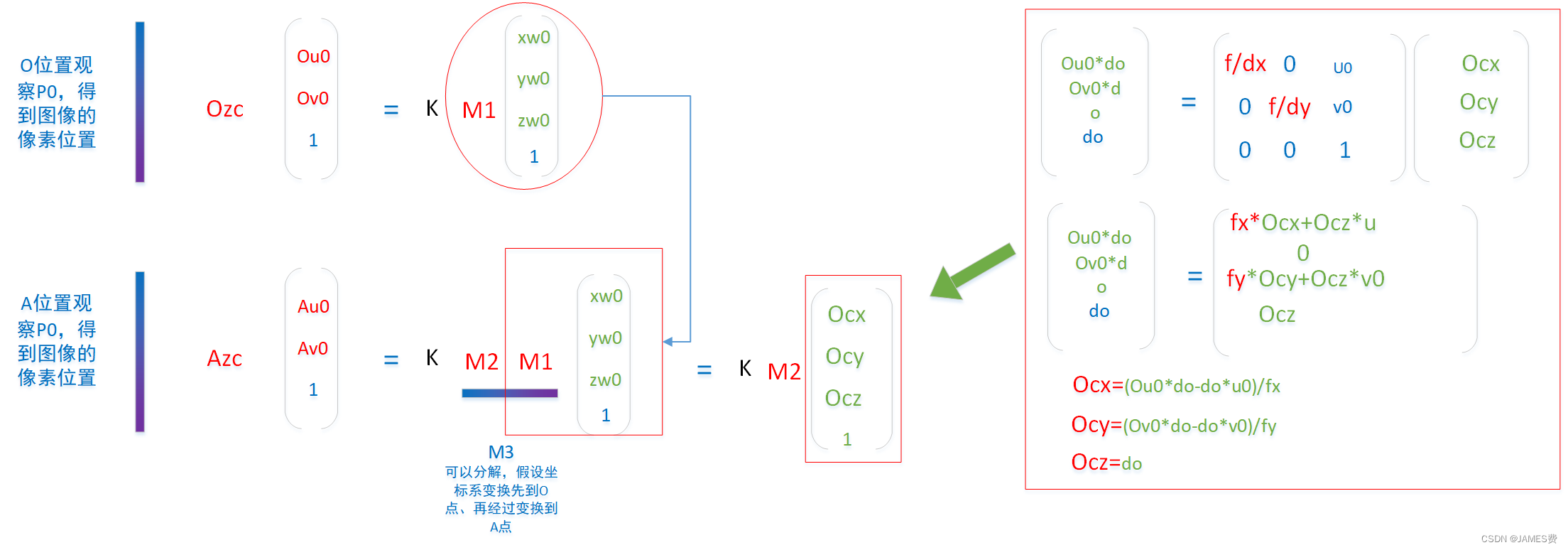
到此,我们可以大概看出,要解决本篇的目标(求M2),是可以通过观察比较两个位置的图像上的成像点的像素坐标,经过一些列计算得到的。2)三自由度下的变换关系
(1)P0到O的运动,M1
由于O点位置我们是已知的,运动也是已知的,从图可以看出,从P0点到O点位置运动,就是世界坐标系平移旋转后到相机坐标系O的过程:即,先沿着坐标yw的负方向平移5000mm,然后绕xw轴旋转270°即为O系坐标:

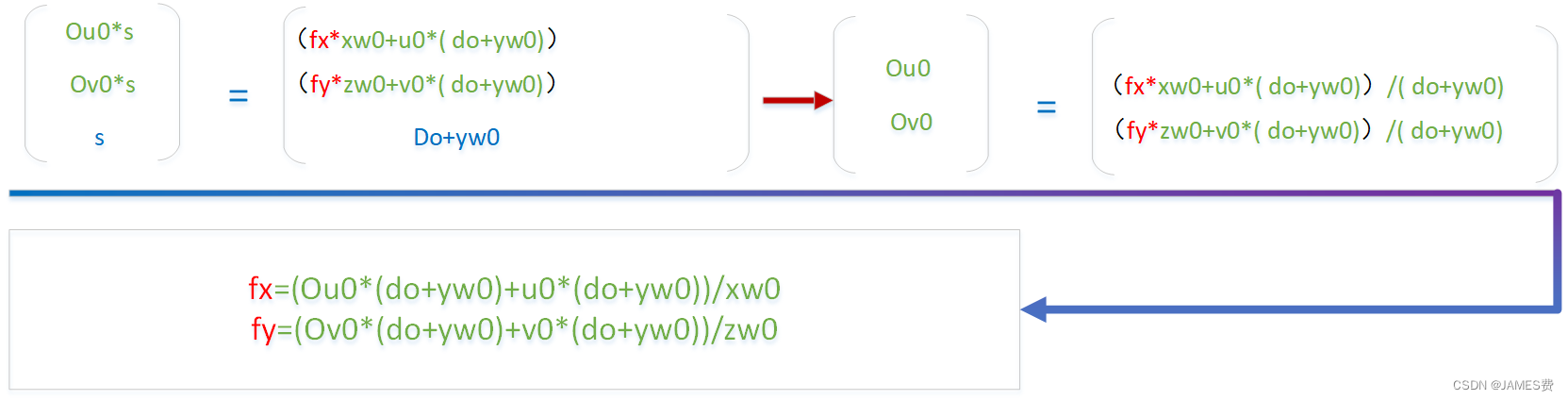
这样已知M1,和坐标点,我们在不考虑畸变的情况下,可以对不知道相机内参的相机,进行简单“标定”,求出内参K:

通过以上方程,可知K里面有3个未知数,那么其实可以带入已知的2个点P0,P1获取图像的像素点坐标,就可以解出内参的数值。这其实也是简化的相机标定原理!
经过推导可得到如下算式(令fx=f/dx,fy=f/dy):
python程序
根据以上公式,我们就可以做一个函数,实现根据初始位置图像的计算相机K参数:
def sovle_K_byimg(img,P0,tagid=1,do=5000): """ 根据已知0位图,和t时刻图计算当前位置 P0: 固定标签点的世界坐标(x,y,z) """ H=img.shape[0] W=img.shape[1] u0=W/2 v0=H/2 (xw0,yw0,zw0)=P0 #获取特征点的像素坐标 res,tagcenter=apritap(img,multple=0,tagid=tagid) if res: Ou0=tagcenter[0] Ov0=tagcenter[1] print("tag center:",Ou0,Ov0) if xw0 and zw0: fx=(Ou0*(do+yw0)-u0*(do+yw0))/xw0 fy=-(Ov0*(do+yw0)-v0*(do+yw0))/zw0 return True,fx,fy else: print("sovle_K_byimg:P0 x,z not be zero") return False,0,0 else: print("sovle_K_byimg failed") return False,None,None- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
计算结果如下:
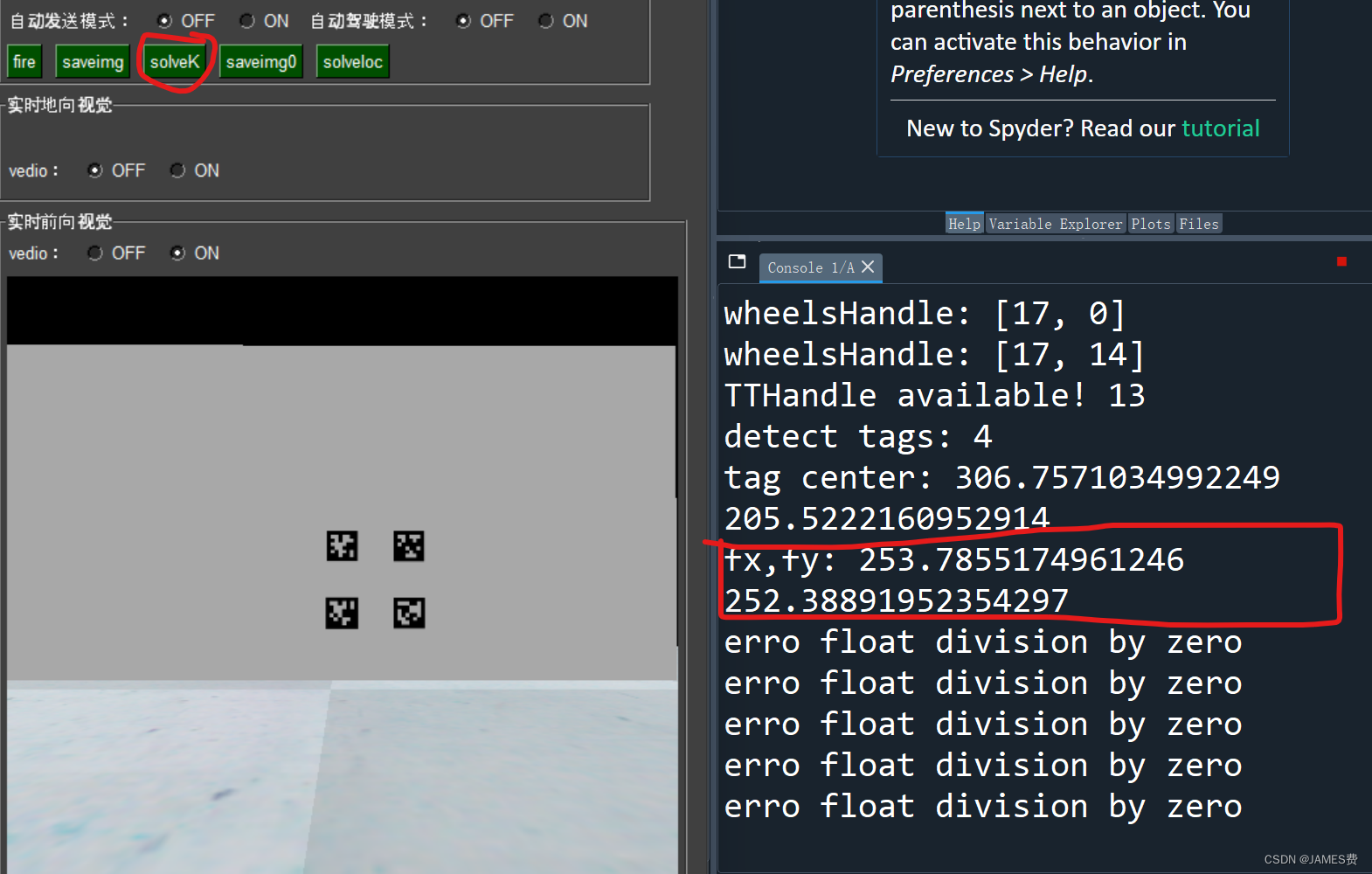
可以看到,由于识别的二维码位置有误差,计算出来的fx、fy会有误差,实际,在仿真环境,摄像头为理想模型无畸变,其参数为fx=256,fy=256。(2)O到A位的运动,M2
在本项目中,由于我们简化了场景,事实上,小车运动是在一个二维平面的,相机也是如此,在一个二维平面做平移运动,同时只沿着yc轴做旋转运动,其它自由度的运动都为0,这样一来就大大减少了所要求解的参数。
O到A运动,涉及的旋转矩阵其实只有一个Ry(θ)
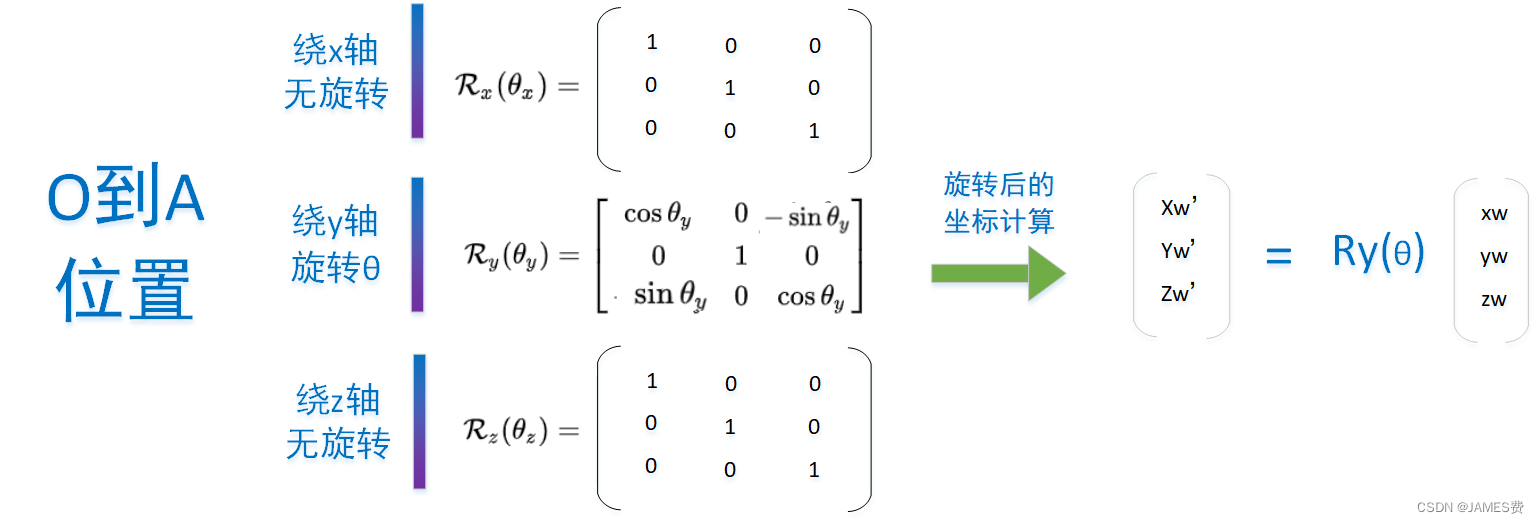
然后其平移也只是在相机坐标轴z、x方向的变化,那么结合上面的公式可以列出方程组:
从上面方程组可以看出,本固定场景下,要求的相机位置A涉及未知数(xx,zz)和θ,要求出这些未知数,只要代入足够多的已知点,就可以解出方程。方程推导如下:
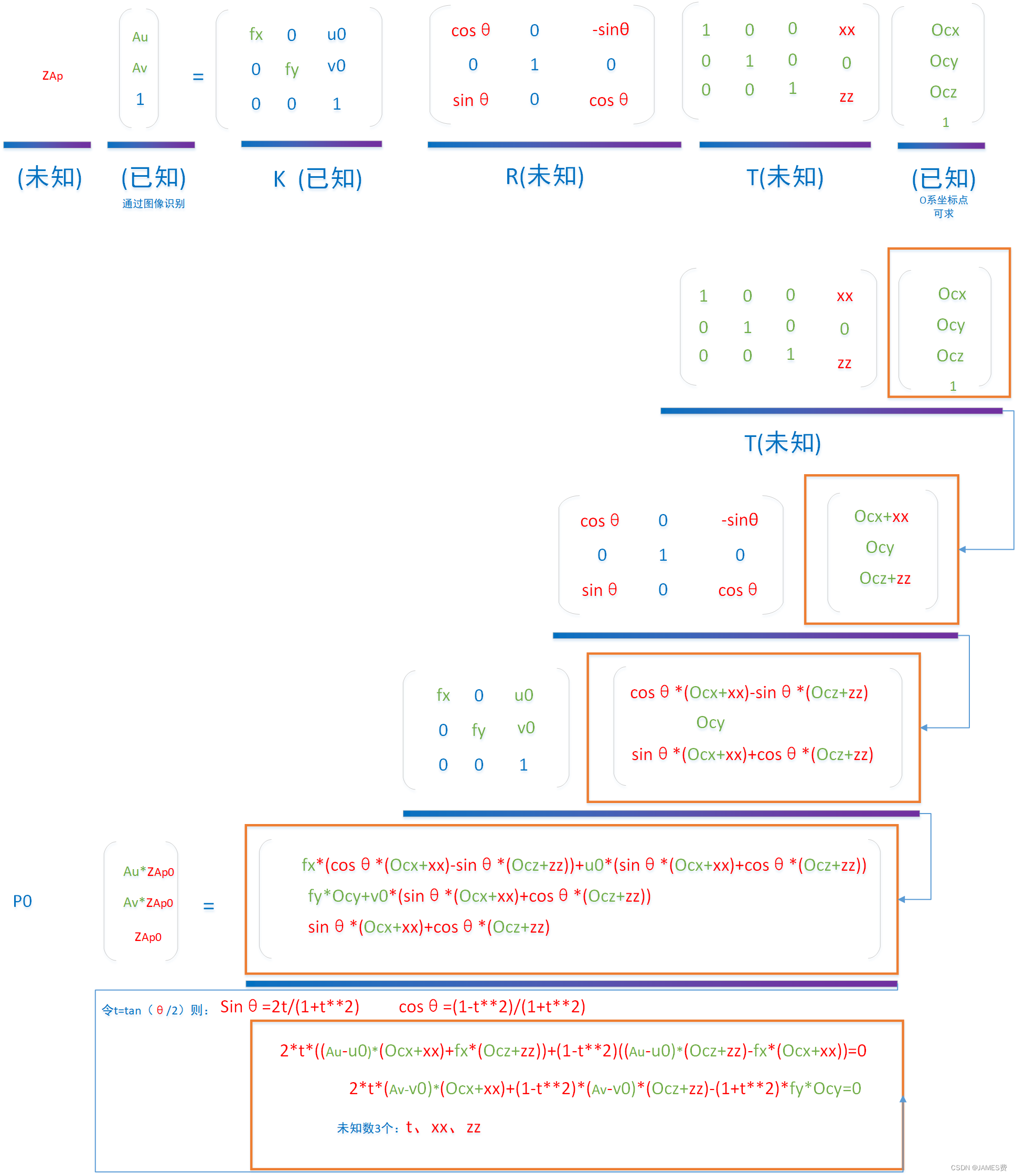
从上面可知,未知数有3个,但是只有二个方程组,为超定方程组,我们可以通过加入其它固定点的信息,利用最小二乘法求解未知数。
下面我们来编程实现一下:
python编程
#构建方程组(部分代码) def solve_f(xn): """ 解方程组 """ t,xx,zz=xn equations="[" for i in Pnum: equations=equations+"2*t*((Au"+str(i)+"-u0)*(Ocx"+str(i)+"+xx)+fx*(Ocz"+str(i)+"+zz))+(1-t**2)*((Au"+str(i)+"-u0)*(Ocz"+str(i)+"+zz)-fx*(Ocx"+str(i)+"+xx))," equations=equations+"2*t*(Av"+str(i)+"-v0)*(Ocx"+str(i)+"+xx)+(1-t**2)*(Av"+str(i)+"-v0)*(Ocz"+str(i)+"+zz)-(1+t**2)*fy*Ocy"+str(i)+"," equations=equations[:-1]+"]" return eval(equations)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
运行结果如下:
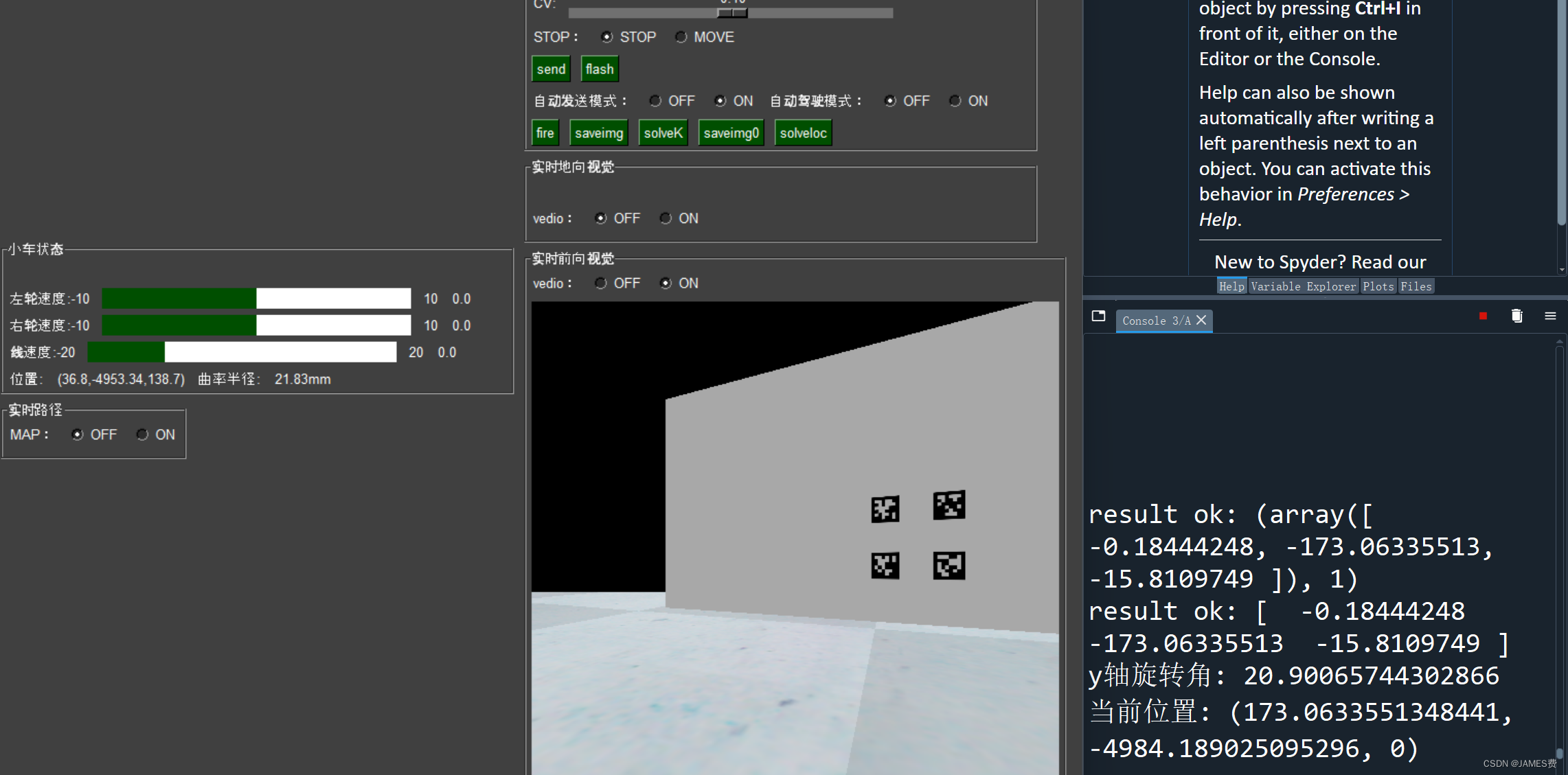
以上算法有一定的误差,我这里只用到了3个特征点,实际应用中需要进行多个采样点,并使用优化算法进行非线性优化。四、上篇总结
这样,在固定场景下,以及相机为理想模型下,我们通过对相机成像原理模型,构建了本项目所需的位置估计算法。实际应用中,相机的内参可以通过相机标定方法进行标定获得,由于存在视觉误差,且需要对相机位置的估计进行必要的优化,或者装设激光雷达等其它传感进行多源信息的校核。
下篇我们基于本篇的位置信息,来进一步实现小车的自动控制。 -
相关阅读:
ffmpeg 常用的批处理文件(windows版)
探索工业AI智能摄像机的高端科技
Redis客户端访问
dubbo环境搭建ZooKeeper注册中心
异步同步调用
Java递归算法(Java算法和数据结构总结笔记)[6/20]
RedisObject
阿里影业S1财报解读:优质内容叠加整合效益,转动增长飞轮
若依框架数据源切换为pg库
双指针算法
- 原文地址:https://blog.csdn.net/kanbide/article/details/127595315