-
(49)STM32——照相机实验
目录
学习目标
本节我们学习的是照相机实验,主要的功能就是将照片拍下,然后把数据解码,最后将图片数据保存到SD卡里,在运用上节课的图片显示实验来显示。
图片格式
BMP
- 全称BitMap,是Windows中的标准图像文件格式,后缀名为:“.bmp”。
- 采用位映射存储方式,除图像深度可选外,不做任何压缩。
- 图像深度可选:1、4、8、16、24、32bit。
- BMP文件存储数据时,图像的扫描方式是按照从左到右、从上到小的顺序。
- 优点:但是没有任何失真,图片保存完好。
- 缺点:图片占用空间大。
组成
- 位图头文件数据结构,它包含BMP图像文件的类型、显示内容等信息;
- 位图信息数据结构,它包含有BMP图像的宽、高、压缩方法,以及定义颜色等信息;
- 调色板,这个部分可选,有些位图需要调色板,有些位图不需要调色板(比如:24位的BMP);
- 位图数据,这部分的内容根据BMP位图使用的位数不同而不同,在24位图中直接使用RGB,而其他的小于24位的使用调色板中颜色索引值。
BMP文件头
BMP文件头(14字节):BMP文件头数据结构含有BMP文件的类型、文件大小和位图起始位置等信息。BMP文件头结构体定义如下:
- //BMP文件头
- typedef __packed struct
- {
- u16 bfType; //文件标志,只对‘B’‘M’,用来识别BMP位图类型
- u32 bfSize; //文件大小,占四个字节
- u16 bfReserved1;//保留
- u16 bfReserved2;//保留
- u32 bfOffBits; //从文件开始到位图数据(bitmap data)开始之间的偏移量
- }BITMAPFILEHADER;
位图信息头
位图信息头(40字节):BMP位图信息头数据用于说明位图的尺寸等信息。 BMP位图信息头结构体定义如下:
设置biCompression的值时一般不会设置为BI_RLE84和BI_RLE8,经常设置为BI_BITFIELDS如果是16位图时会直接设置为BI_BITFIELDS。biSizeImage是根据biWidth、 biHeight、biBitCount计算出一个字节数来设置。剩下的几个一般设置为0。
- typedef __packed struct
- {
- u32 biSize ; //说明BITMAPINFOHEADER结构(本结构体)所需要的字数。
- long biWidth ; //说明图象的宽度,以象素为单位
- long biHeight ; //说明图象的高度,以象素为单位
- u16 biPlanes ; //为目标设备说明位面数,其值将总是被设为1
- u16 biBitCount ; //说明比特数/象素,其值为1、4、8、16、24、或32
- u32 biCompression ; //说明图象数据压缩的类型。其值可以是下述值之一:
- //0:BI_RGB:没有压缩;
- //1:BI_RLE8:每个象素8比特的RLE压缩编码,压缩格式由2字节组成
- //2:BI_RLE4:每个象素4比特的RLE压缩编码,压缩格式由2字节组成
- //3:BI_BITFIELDS:每个象素的比特由指定的掩码决定。
- u32 biSizeImage ; //说明图象的大小,以字节为单位。当用BI_RGB格式时,可设置为0
- long biXPelsPerMeter ; //说明水平分辨率,用象素/米表示
- long biYPelsPerMeter ; //说明垂直分辨率,用象素/米表示
- u32 biClrUsed ; //说明位图实际使用的彩色表中的颜色索引数
- u32 biClrImportant ; //说明对图象显示有重要影响的颜色索引的数目,
- //如果是0,表示都重要。
颜色表
颜色表(调色板):颜色表用于说明位图中的颜色,它有若干个表项,每一个表项是一个RGBQUAD类型的结构,定义一种颜色,如下所示:
- typedef __packed struct
- {
- u8 rgbBlue ; //指定蓝色强度
- u8 rgbGreen ; //指定绿色强度
- u8 rgbRed ; //指定红色强度
- u8 rgbReserved ; //保留,设置为0
- }RGBQUAD ;
RGBQUAD结构数据的个数由biBitCount来确定:当biBitCount=1、4、8时,分别有2、16、256个表项;当biBitCount大于8时,没有颜色表项。
BMP文件头、位图信息头和颜色表组成位图信息,BITMAPINFO结构定义如下:
- typedef __packed struct
- {
- BITMAPFILEHADER bmfHeader;
- BITMAPINFOHEADER bmiHeader;
- RGBQUAD bmiColors[1];
- }BITMAPINFO;
位图数据
位图数据:记录了位图的每一个像素值,记录顺序是在扫描行内是从左到右,扫描行之间是从下到上。位图一个像素值所占字节数:
当biBitCount=1时,8个像素占1个字节;
当biBitCount=4时,2个像素占1个字节;
当biBitCount=8时,1个像素占1个字节;
当biBitCount=16时,1个像素占2个字节;
当biBitCount=24时,1个像素占3个字节;
当biBitCount=32时,1个像素占4个字节;
biBitCount=16,即高彩色(65K色)。当biCompression=BI_RGB(0),则采用RGB555格式,最高位恒为0;当biCompression= BI_BITFIELDS(3),则在原来调色板位置用3个DWORD类型的掩码替换,分别代表红、绿、蓝三色的掩码,一般是: 0X7C00(高5位)、0X03E0(中6位)、0X001F(低5位)。
编码
我们采用16位BMP编码(因为LCD就是16位色的,而且16位BMP编码比24位BMP编码更省空间),故我们需要设置biBitCount的值为16,这样得到新的位图信息(BITMAPINFO)结构体。
- typedef __packed struct
- {
- BITMAPFILEHEADER bmfHeader;
- BITMAPINFOHEADER bmiHeader;
- u32 RGB_MASK[3]; //调色板用于存放RGB掩码
- }BITMAPINFO;
RGB_MASK[3],即颜色掩码,分别代表红、绿、蓝三色的掩码,分别是: 0X7C00、0X03E0、0X001F。
步骤
- 创建BMP位图信息(上面的结构体),并初始化各个相关信息。首先,我们要设置BMP图片的分辨率为LCD分辨率、BMP图片的大小(整个BMP文件大小)、BMP的像素位数(16位)和掩码等信息。
- 创建新BMP文件,写入BMP位图信息。我们要保存BMP,当然要存放在某个地方(文件)(SD卡或U盘),所以需要先创建文件,同时先保存BMP位图信息,之后才开始BMP数据的写入。
- 保存位图数据。这里就比较简单了,只需要从LCD的GRAM里面读取各点的颜色值,依次写入第二步创建的BMP文件即可。注意:保存顺序(即读GRAM顺序)是从左到右,从下到上。
- 关闭文件。使用FATFS,在文件创建之后,必须调用f_close,文件才会真正体现在文件系统里面,否则是不会写入的!这个要特别注意,写完之后,一定要调用f_close。
JPG
- JPG是Joint Photographic Experts Group(联合图像专家小组)的缩写,是第一个国际图像压缩标准。后缀名为:“.JPEG”
- JPEG图像压缩算法能够在提供良好的压缩性能的同时,具有比较好的重建质量,被广泛应用于图像处理领域。
- 采用有损压缩格式,能够将图像压缩在很小的存储空间。压缩技术先进,允许用不同的压缩比例对文件进行压缩,支持多种压缩级别。压缩比越大品质越低。
- 在图像质量和存储空间之间选择一个平衡点
编码
- 使用正向离散余弦变换(Forward Discrete Cosine Transform,FDCT)把空间域表示的图变换成频率域表示的图。
- 使用加权函数对DCT系数进行量化,这个加权函数对于人的视觉系统是最佳的。
- 使用霍夫曼可变字长编码器对量化系数进行编码。
拍照步骤
- 初始化STM32F4的DCMI接口和OV2640模块。首先,我们要初始化STM32的DCMI接口(包括开启DMA和相关中断)和相关IO,然后配置好OV2640输出JPEG数据流。
- 读取OV2640模块的数据。在DCMI接口的驱动下,有序读取OV2640输出的JPEG数据流,我们采用DMA双缓冲来接收JPEG数据流,并将这些数据及时搬运到外部SRAM(不能直接将OV2640的数据输出到外部SRAM因为外部SRAM速度跟不上,通过DMA的传输完成中断来处理)。
- 保存JPEG数据。在采集完一帧JPEG数据后,利用fatfs,创建一个.jpg文件,然后将存储在外部SRAM的数组(以0XFF,0XD8开头)存储在这个文件里面,最后调用f_close关闭文件,即可实现JPEG拍照保存。
配置
本例程使用DMA的双缓冲机制来读取,DMA双缓冲读取JPEG数据框图如下图:
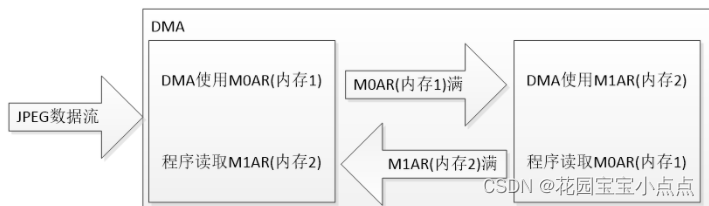
- DMA接收来自OV2640的JPEG数据流,首先使用M0AR(内存1)来存储,当M0AR满了以后,自动切换到M1AR(内存2),同时程序读取M0AR(内存1)的数据到外部SRAM;当M1AR满了以后,又切回M0AR,同时程序读取M1AR(内存2)的数据到外部SRAM;依次循环(此时的数据处理,是通过DMA传输完成中断实现的,在中断里面处理),直到帧中断,结束一帧数据的采集,读取剩余数据到外部SRAM,完成一次JPEG数据的采集。
- 这里,M0AR,M1AR所指向的内存,必须是内部内存,不过由于采用了双缓冲机制,我们就不必定义一个很大的数组,一次性接收所有JPEG数据了,而是可以分批次接收,数组可以定义的比较小。最后,将存储在外部SRAM的jpeg数据,保存为.jpg/.jpeg存放在SD卡,就完成了一次JPEG拍照。
代码
给出main函数的部分代码。
- while(1)
- {
- key=KEY_Scan(0);//不支持连按
- if(key)
- {
- DCMI_Stop(); //停止显示
- if(key==WKUP_PRES)
- {
- scale=!scale;
- if(scale==0)
- {
- if(lcddev.id == 0X5510)
- {
- SCCB_WR_Reg(0xd3,0x02);
- }
- OV2640_ImageWin_Set((1600-lcddev.width)/2,(1200-lcddev.height)/2,lcddev.width,lcddev.height);//1:1真实尺寸
- OV2640_OutSize_Set(lcddev.width,lcddev.height);
- sprintf((char*)msgbuf,"Full Size 1:1");
- }else
- {
- OV2640_ImageWin_Set(0,0,1600,1200); //全尺寸缩放
- OV2640_OutSize_Set(lcddev.width,lcddev.height);
- sprintf((char*)msgbuf,"Scale");
- }
- LCD_ShowString(30,50,210,16,16,msgbuf);//显示提示内容
- delay_ms(800);
- }else if(sd_ok)//SD卡正常才可以拍照
- {
- sw_sdcard_mode(); //切换为SD卡模式
- if(key==KEY0_PRES) //BMP拍照
- {
- camera_new_pathname(pname,0);//得到文件名
- res=bmp_encode(pname,0,0,lcddev.width,lcddev.height,0);
- }else if(key==KEY1_PRES)//JPG拍照
- {
- camera_new_pathname(pname,1);//得到文件名
- res=ov2640_jpg_photo(pname);
- if(scale==0)
- {
- OV2640_ImageWin_Set((1600-lcddev.width)/2,(1200-lcddev.height)/2,lcddev.width,lcddev.height);//1:1真实尺寸
- OV2640_OutSize_Set(lcddev.width,lcddev.height);
- }else
- {
- OV2640_ImageWin_Set(0,0,1600,1200); //全尺寸缩放
- }
- OV2640_OutSize_Set(lcddev.width,lcddev.height);
- }
- sw_ov2640_mode(); //切换为OV2640模式
- if(res)//拍照有误
- {
- Show_Str(30,130,240,16,"写入文件错误!",16,0);
- }else
- {
- Show_Str(30,130,240,16,"拍照成功!",16,0);
- Show_Str(30,150,240,16,"保存为:",16,0);
- Show_Str(30+42,150,240,16,pname,16,0);
- BEEP=1; //蜂鸣器短叫,提示拍照完成
- delay_ms(100);
- }
- }else //提示SD卡错误
- {
- Show_Str(30,130,240,16,"SD卡错误!",16,0);
- Show_Str(30,150,240,16,"拍照功能不可用!",16,0);
- }
- BEEP=0; //关闭蜂鸣器
- if(key!=WKUP_PRES)delay_ms(1800);//非尺寸切换,等待1.8秒钟
- DCMI_Start(); //停止显示
- }
- if (hsync_int) //刚刚产生帧中断,可以延时
- {
- delay_ms(10);
- hsync_int = 0;
- }
- i++;
- if(i==20)//DS0闪烁.
- {
- i=0;
- LED0=!LED0;
- }
总结
本实验还是挺有趣的,和前面结合在一起,但没能完全掌握,还得慢慢理解。
-
相关阅读:
Python采集某Top 250信息,再也不怕寂寞无聊......
流量控制&可靠传输机制&停止-等待协议
【数据结构与算法】图的基本结构介绍 | 邻接表与邻接矩阵编码实战
Java多线程:Thread类常用API
Tekla添加零件ContourPlate
Netbeans介绍
ZZNUOJ_用C语言编写程序实现1211:日期排序(附完整源码)
存储介质中ext4的文件排布
电机控制算法
Torch not compiled with CUDA enabled
- 原文地址:https://blog.csdn.net/weixin_66578482/article/details/127708385
