-
智能佳-E-PUCK2分布式单体智能集群协作机器人

E-PUCK2群体智能协作系统介绍
E-PUCK 2.0(伊普克)嵌入式机器人是由瑞士洛桑联邦理工学院(EPFL )开发小型移动式机器人,已在国内外上百所高校和研究院在使用,例如斯坦福、剑桥大学、苏黎世联邦理工学院、清华大学、北京大学、国防科技大学等,并有很多研究成果发表在IEEE、FreeCheck等核心期刊中。
随着科技的发展,单体智能机器人已经不能满足不断提高的控制系统性能需求,多智能体机器人协同控制以其更好的智能性和自适应等优势,逐渐成为机器人控制领域的研究热点。分布式控制是一种去中心化的多智能体协同的系统设计方法,在适应复杂环境的能力、提高系统的工作效率等方面都具有重要的理论和实际意义。
E-PUCK分布式群体智能特点

E-PUCK2.3分布式群体智能协同系统架构

- 上位机:作为辅助调试设备负责远程监听所有机器人的信息,用于数据统计与分析,优化集群算法;
- 无线通信系统:负责上位机与机器人建立无线连接,给机器人发送起始信号,实时接收机器人状态信息等;
- 驱动控制层:负责机器人运动、状态显示和传感器数据采集等功能;
- 核心算法层:负责采集机器人运动控制层和通信层传回来的信息,通过进行数据分析与处理,进行复杂运算以及处理交互信息;
- 信息交互层:机器人彼此之间通过12组红外传感器实现与邻域机器人的通信,获得与邻域机器人的距离与方位信息;
- 视觉处理层:采集机器人周围图像信息,可以识别机器人或障碍物,以及进行场地边界识别等信息;
- 通过鲁棒四边形分布式网格定位法和信标定位法,所有机器人具有一致的共享坐标系,各个机器人在此坐标系内通过局部感知、自主决策、相互协调等完成特定任务。
群智能研究主要课题及方向
智能蚁群算法
人员自然流动算法
群居活动聚类算法
仿生机器人学优化算法
自主决策与远程控制算法
病毒传播模型算法
人工神经网络算法验证
粒子群优化算法
多机器人协同合作算法

E-PUCK2.3自主机器人介绍
通过提升E-PUCK2.0机器人配置,增加PI-puck核心控制板、红外测距模块以及360°环视摄像头,使得机器人具有强大的计算能力、近距离彼此位置感应能力、距离探测能力以及身份识别能力,为实现大规模分布式集群控制究提供硬件基础,可完成多机器人之间的编队与避碰控制。




核心控制板配有树莓派zero w可以运行Linux操作系统,提升E-puck2机器人算力,可以验证神经网络算法研发。
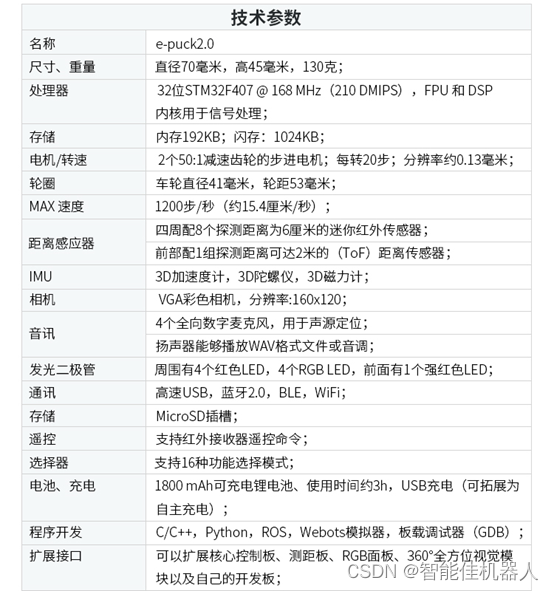
技术参数:
采用树莓派Zero W核心处理器;
配有16G micro SD;
内置标准的Linux运行系统;
2个RGB LED状态指示灯;
1个数字麦克风;
1个1W扬声器;
支持充电墙自动充电和USB充电;
6个I2C接口、2个ADC输入接口;

该模块包括12对红外发射与接收传感器,MAX感应距离可达80cm,可以在没有其他集中控制或外部定位设备控制的情况下,实现机器人对四周有效通信范围内的角度、距离感知,以及彼此信息交互。
技术参数:
采用MicroChip dsPIC33F系列核心处理器;
12对红外发射/接收传感器;
红外模块角度分配约30°;
MAX 测距范围约80cm;
支持I2C和RS232两种通讯模式;
电压范围:2.5 V至6 V;
1个TV Remote 接收器 ;
1个档位选择开关;

技术参数:
VGA 彩色摄像头;
360°环视抛物面镜;
最高支持1080P 30fps;
兼容Pi-puck连接树莓派Zero W;
支持OpenCV图像处理、斑点、颜色和光线检测。

提供技术资料
- 提供机器人端与群体智能协作系统的通信协议。
- 提供机器人模块目标速度控制接口
- 提供机器人模块目标角度控制接口
- 提供机器人单体避障算法与demo
- 提供机器人群体队列保持算法demo
- 提供机器人跟随算法demo
- 协同感知算法demo
产品配置清单
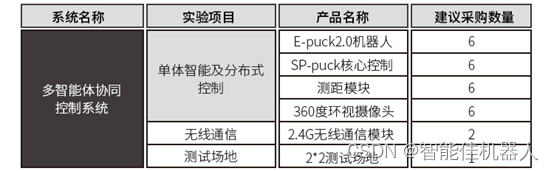
备注:可根据实验内容增减机器人数量!
群体智能实验案例

国内部分应用学校

最新参考文献
Oh, H., Shiraz, A. R., & Jin, Y. (2018). Morphogen diffusion algorithms for tracking and herding using a swarm of kilobots.Soft Computing,22(6), 1833-1844.
Agrawal, M., & Glotzer, S. C. (2020). Scale-free, programmable design of morphable chain loops of kilobots and colloidal motors.Proceedings of the National Academy of Sciences,117(16), 8700-8710.
Zhong, V. J., Umamaheshwarappa, R. R., Dornberger, R., & Hanne, T. (2018, March). Comparison of a real kilobot robot implementation with its computer simulation focussing on target-searching algorithms. In2018 International Conference on Intelligent Autonomous Systems (ICoIAS)(pp. 160-164). IEEE.
Holland, J., Griffith, J., & O'Riordan, C. (2018, April). Evolving collective behaviours in simulated kilobots. InProceedings of the 33rd Annual ACM Symposium on Applied Computing(pp. 824-831).
Miquel Kegeleirs, Giorgio Grisetti, and Mauro Birattari. Swarm slam: Challenges and perspectives. Frontiers in Robotics and AI, 8:23, 2021. [ bib | DOI | http ]
Eduardo Castelló Ferrer, Thomas Hardjono, Alex Pentland, and Marco Dorigo. Secure and secret cooperation in robot swarms. Science Robotics, 6(56):eabf1538, 2021. [ bib | DOI | arXiv | http ]
Qihao Shan and Sanaz Mostaghim. Discrete collective estimation in swarm robotics with distributed bayesian belief sharing. Swarm Intelligence, Sep 2021. [ bib | DOI | http ]
Ken Hasselmann, Antoine Ligot, Julian Ruddick, and Mauro Birattari. Empirical assessment and comparison of neuro-evolutionary methods for the automatic off-line design of robot swarms. Nature Communications, 12(1):4345, Jul 2021. [ bib | DOI | http ]
Tohid Kargar Tasooji and Horacio J. Marquez. Cooperative localization in mobile robots using
event-triggered mechanism: Theory and experiments. IEEE Transactions on Automation Science and Engineering, pages 1--13, 2021. [ bib | DOI ]
Yahya Muhammad Adam, Nohaidda Binti Sariff, and Nasir A. Algeelani. E-puck mobile robot obstacles avoidance controller using the fuzzy logic approach. In 2021 2nd International Conference on Smart Computing and Electronic Enterprise (ICSCEE), pages 107--112, 2021. [ bib | DOI ]
Pranav Kedia and Madhav Rao. Gengrid: A generalised distributed experimental environmental grid for swarm robotics. In 2021 IEEE International Conference on Robotics and Automation (ICRA), pages 1910--1917, 2021. [ bib | DOI ]


-
相关阅读:
Fastjson JdbcRowSetImpl利用链学习
数据分析框架1.0 从黄金思维圈到万能三步走
C#(Csharp)我的基础教程(一)(我的菜鸟教程笔记)-构造方法学习与探究
670.最大交换 暴力、单调栈、指针的逆序遍历 三种解题思路。
“碳”零排放是什么意思
湖南软件测评公司简析:软件功能测试和非功能测试的联系和区别
SPI通信实验
10-io java
React 全栈体系(八)
realvnc-server-aarch64-ubuntu
- 原文地址:https://blog.csdn.net/allie2013/article/details/127633930