-
复杂环境下多移动机器人路径规划研究附Matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
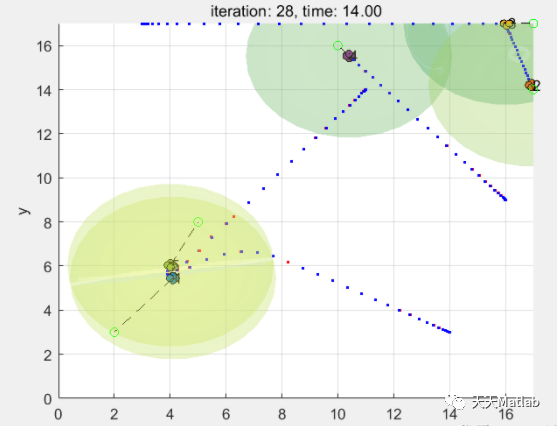
多机器人路径规划问题(Multi-robot Path Planning)不仅是机器人导航领域的核心内容,还是机器人研究领域的重点,难点问题.复杂环境下的多移动机器人路径规划问题是指,在同时存在静态和动态障碍物的工作空间中,为每台机器人都规划出一条从起点到目标点的系统要求的最优路径,同时还要保证机器人与障碍物之间,机器人与机器人之间不发生碰撞.
⛄ 部分代码
function [d,path,position]= verify(bestpath,threat,R,startX,startY,endX,endY,gridCount)
(j,1))^2+(y_2-threat(j,2))^2);
if (d
cost(Allowed(i,1),Allowed(i,2))=Inf;
end
end
end
u=1;
%计算次优航程,这里的原理主要是从蝙蝠个体的坐标中选取合适的点,然后在之后的流程由点成线
dist=cost(1,:);
s=zeros(size(dist));
s(1)=1;
dist(1)=0;
path=zeros(size(dist));
path(1,:)=1;
for num=2:n
mindist=Inf;
for i=1:length(dist)
if s(i)==0
if dist(i)
mindist=dist(i);
u=i;
end
end
end
s(u)=1;
for w=1:length(dist)
if s(i)==0
if dist(u)+cost(u,w)
dist(w)=dist(u)+cost(u,w);
path(w)=u;
end
end
end
end
i=n;
d=0;
count=0;
while i>1
j=path(i);
%plot([position(i,1),position(j,1)],[position(i,2),position(j,2)],'Linewidth',2)
%axis([0,700,0,700]);
d=d+sqrt((position(i,1)-position(j,1))^2+(position(i,2)-position(j,2))^2);
i=j;
count=count+1;
end
%这里这么做主要是避免无人机航线中只存在两个点
if count==1
d=Inf;
end
d;path;position;
⛄ 运行结果
⛄ 参考文献
[1]王松杰. 复杂环境下移动机器人路径规划方法的研究[D]. 河北工程大学, 2018.
❤️ 关注我领取海量matlab电子书和数学建模资料
❤️部分理论引用网络文献,若有侵权联系博主删除
-
相关阅读:
stm32——hal库学习笔记(ADC)
OneAuth 2022.11.23版本更新内容
LabVIEW步进电机的串口控制方法与实现
nginx——不同前端项目共用一个端口
支持JDK19虚拟线程的web框架之四:看源码,了解quarkus如何支持虚拟线程
VSCode python extension loading 终极解决方案
2023年高教社杯数学建模国赛C题详细版思路
YOLOX 学习笔记
【毕业设计】27-基于单片机的家庭监控及防盗报警_热释电报警_人体系统工程设计(原理图+源代码+仿真+实物照片+答辩论文)
Mybatis入门
- 原文地址:https://blog.csdn.net/matlab_dingdang/article/details/127629239