-
【卡尔曼滤波】卡尔曼滤波简单实例
参考&引用
[1] 严老师捷联惯导课程视频:https://www.bilibili.com/video/BV177411K7sS/
[2] 【卡尔曼滤波】离散线性系统的卡尔曼滤波:https://blog.csdn.net/Gou_Hailong/article/details/123050594Part.I 问题&解决方案
ps: 之前想做的 Kalman 滤波的实例今天终于有时间做了!
问题描述:某房间内温度受随机干扰影响,每小时用温度计测量一次温度,试对该房间温度作最佳估计(单位℃) ;假设:干扰 W ∼ N ( 0 , 0. 4 2 ) W∼N(0,0.4^2) W∼N(0,0.42) ,温度计的量测误差 V ∼ N ( 0 , 0. 3 2 ) V∼N(0,0.3^2) V∼N(0,0.32) 单位都是℃,假设 t 1 t_1 t1 时刻房间的温度是 25±0 ℃,在 t 2 , t 3 t_2,t_3 t2,t3 时刻分别用温度计量测的温度为 25.2, 25.5 ℃,求 t 2 , t 3 t_2,t_3 t2,t3 时刻房间的真实温度。
Chap.I 解决方案
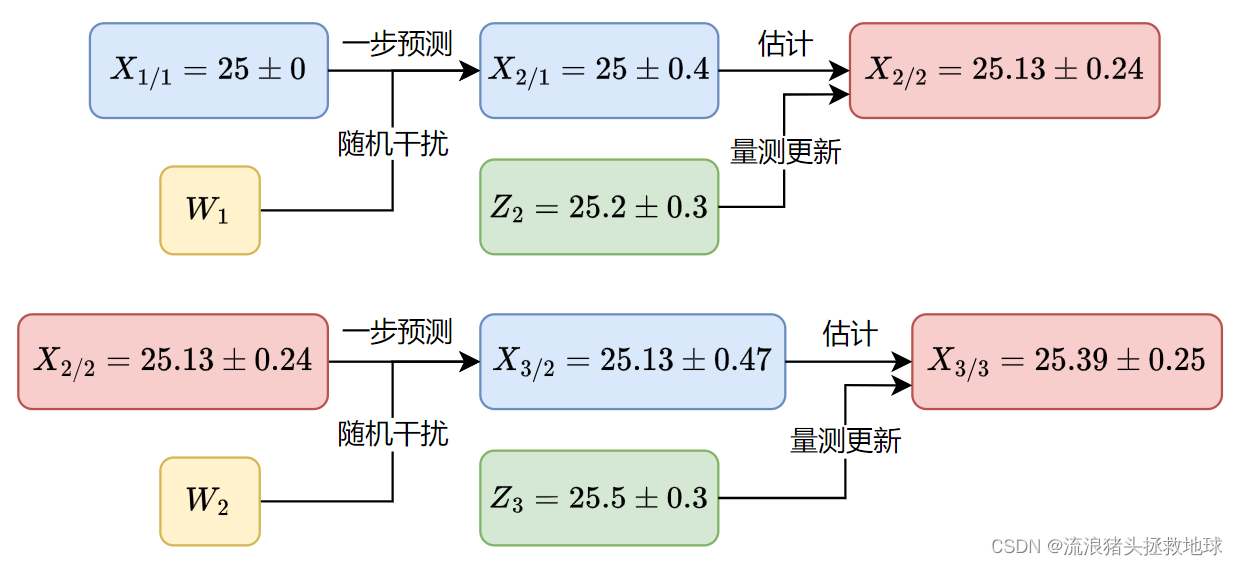
估计流程如下所示:
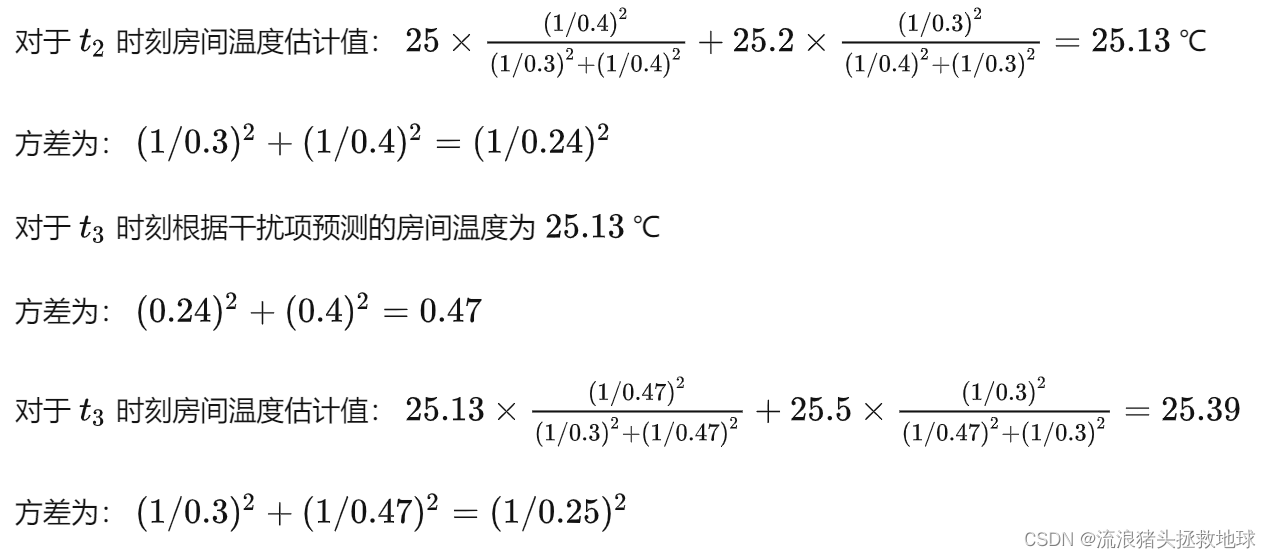
计算过程如下:
Chap.II 建模与分析
对上面的问题进行建模如下:
X k = X k − 1 + W k − 1 X_k=X_{k-1}+W_{k-1} Xk=Xk−1+Wk−1
Z k = X k + V k Z_k=X_k+V_k Zk=Xk+Vk- 上面第一个式子的含义:这一时刻房间真实温度=上一时刻的房间温度+这段时间的干扰项
- 上面第二个式子的含义:这一时刻的房间温度量测值=这一时刻房间的真实温度+量测误差(噪声)
- 模型目的就是根据上一时刻房间的真实温度、干扰、这一时刻的量测值、量测噪声,求这一时刻的房间真实温度。
一些思考与讨论
- 如果
W=0,换言之干扰项为零,这个房间的温度是恒定不变的,但是房间温度的初值不知道,这就完全取决于量测噪声的影响了。这就类似于拿一个尺子,多次量测一个固定长度的桌子,最优解就是多次量测取均值,并且量测次数越多,最后得到的精度越高。 - 如果
V=0,换言之温度计足够精准,那么温度计的量测值就是房间的真实温度!这种情况下就不需要这套估计理论了。实际上,量测误差总会存在的,绝对精准的仪器是不存在的。
Part.II 简单实现
下面对上面的问题用
python简单实现了一下:import math def perdict(x1_1,W): ''' Predict ''' x=x1_1[0]+W[0] # I'm not sure about this sigma=math.sqrt(x1_1[1]**2+W[1]**2) return [x,sigma] def estimate(x2_1,z): ''' Estimate ''' x=x2_1[0]*z[1]**2/(z[1]**2+x2_1[1]**2)+z[0]*x2_1[1]**2/(z[1]**2+x2_1[1]**2) sigma=math.sqrt(1/((1/x2_1[1])**2+(1/z[1])**2)) return [x,sigma] def print_result(x2_1,x2_2): ''' Print formatting ''' str1="Predict: "+"%.2f" %x2_1[0]+'±'"%.2f" %x2_1[1]+'; ' str1+="Estimate: "+"%.2f" %x2_2[0]+'±'"%.2f" %x2_2[1]+' ' print(str1) def process(time,x1_1,w,z2): ''' process for one epoch ''' x2_1=perdict(x1_1,w) x2_2=estimate(x2_1,z2) print('t_{} '.format(time),end="") print_result(x2_1,x2_2) return x2_2 x1_1=[25,0] Sw=0.4 Sv=0.3 w=[0,Sw] z2=[25.2,Sv] z3=[25.5,Sv] x2_2=process(2,x1_1,w,z2) x3_3=process(3,x2_2,w,z3)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
输出结果为:
t_2 Predict: 25.00±0.40; Estimate: 25.13±0.24 t_3 Predict: 25.13±0.47; Estimate: 25.39±0.25- 1
- 2
-
相关阅读:
C++: multiple and virtual inheritance under the hood
【C语言】进阶——深度剖析数据的存储
【整顿C盘】pycharm、chrome等软件,缓存移动
【LeetCode-13】罗马数字转整数
IO模型学习笔记
Array类(C#)
Kotlin高仿微信-第14篇-单聊-视频通话
同事提出个我从未想过的问题,为什么Kubernetes要"多此一举"推出静态Pod概念?
他居然发邮件请我去吃饭——邮件伪造那些事儿
【深度学习】实验1布置:Softmax实现手写数字识别
- 原文地址:https://blog.csdn.net/Gou_Hailong/article/details/127502951
